一种近地轨道卫星的自主作业管理的方法
2014-07-19李巍
李 巍
(上海卫星工程研究所,上海 200240)
引言
随着航天事业的发展,发射在轨的卫星数量越来越多,卫星载荷设计越来越复杂。卫星用户单位需要消耗越来越多的人力资源用于卫星的作业计划编制。深空探测器由于通信控制回路较长,一般设计为更多依赖自主任务规划。静止轨道卫星由于星下点位置较为固定,探测目标也较为固定,作业编排变化少。不同于深空探测器和静止轨道卫星,近地轨道卫星的作业安排要求使用灵活、探测目标不固定,可自主任务控制又允许人工深度干预。通过近地轨道卫星自主作业管理系统可以实现卫星根据控制策略长期无人值守自动控制卫星载荷工作,在处理紧急任务或任务模式发生变更时又可以通过少量注数实现载荷的灵活控制。
1 近地轨道卫星的常规编制情况
近地轨道卫星的作业计划编制工作多为人工编排后遥控上注到卫星。作业编排少有创新性,对于气象卫星、资源普查卫星更是作业编制千篇一律少有变化。对于这些人工生成的作业,地面测控系统每天要协调地面上行资源发送遥控数据到卫星同样消耗了大量的人力、物力。对于军事卫星,这种对地面运控系统、测控系统的过分依赖是比较危险的。一旦在战时地面运控系统、测控系统受到破坏这些卫星由于不能自主生成作业而完全失去作用。
目前的卫星载荷作业编制分为3种情况,都不同程度消耗大量的人力、物力资源进行地面干预。
1) 地面用户利用运控系统编制每次任务的作业项或者指令序列,通过测控系统上注到卫星。这些作业项或指令序列中包含卫星载荷的开机、关机的指令,载荷运行的各种模式注数等信息。这些作业项或指令序列由卫星进行解释、执行,完成对载荷的开、关机控制。遥控上注指令序列的方式是每次载荷工作前上注带时间信息的指令序列。这样的指令序列少则十几条,多则近百条指令完成一次载荷的工作控制。由于遥控注数量大,而卫星过境时间有限,就使得载荷控制工作次数较少,载荷利用不饱满。上注作业项的方式,是地面上注作业项信息,这个作业项中包含开、关机时间、载荷工作模式。上注到卫星后由星载计算机进行解析,把这个作业项分解成一串带时间信息的开、关机指令序列。多个作业项组成一个作业表,这种上注作业表的方式较上注指令序列的方式,节约了测控信道上注成本,在相同的过境时间内可完成更多的作业上注。上注作业表对卫星载荷进行控制的方式虽然比上注指令序列的方式节约遥控上注成本,但由于每个作业仍然由地面人工干预生成,并未减少人力资源成本。
2) 某些资源普查卫星利用卫星轨道周期性重返的特点,一次上注可支持一个回归周期内工作的多个作业。卫星反复执行这些作业。一些卫星轨道具有7天、10天等不同的轨道重返周期。用户可以把一个周期的作业表上注到卫星,由卫星自动重复执行这些作业以简化卫星的控制。由于卫星轨道不可避免的飘移,地面控制人员要每隔一段时间重新调整这些作业配置,才能保证卫星经过正确的星下点时开机工作。如果要临时增加一些载荷作业,必须重新上注作业项,如果与周期性工作有冲突还需要重新上注整个周期的作业表。
3) 对数传站、测控站的自主任务规划。一些卫星具有遥测数据下传地面测控站、载荷数据下传地面数传站这些任务的自主规划功能。由于遥测下传作业、数传下传作业较为简单,数传下行射频的开关机时序、工作模式、工作参数配置较为固定。星上存储地面站类型、地理经度、地理纬度、地心纬度、地心距、最小工作仰角,当卫星经过地面站上方,满足最小工作仰角时进行测控、数传的单机开机下传数据。这种方法只针对测控、数传等简单的程控。当涉及到光学载荷、雷达成像载荷、无线电信号侦收载荷等复杂的程控,由于工作参数配置灵活,仍需要人工上注作业进行控制。
以上三种卫星载荷作业编制方法,都需要大量的地面控制人员干预。当有临时作业安排时,作业的注数量较大、注数生成复杂。本文提出的近地轨道卫星的自主作业管理方法可以弥补这些不足。
2 近地轨道卫星的自主作业管理方法
近地轨道卫星自主作业管理方法是利用作业策略解释模块,根据作业模板库、重点区域库、作业策略库的内容在卫星上自动生成作业。由于重点区域根据星下点经纬度划分,卫星根据GPS轨道数据或者轨道平根自动推演卫星飞临重点区域的时间。无论卫星轨道的重访周期性如何都可以自主生成作业。当发生临时作业时,只需上注新的重点区域和新的作业策略即可,这两者的遥控注数量都很小且生成简单,无需复杂的载荷使用背景知识。卫星可通过上注更新作业模板库、重点区域库、作业策略库的方式使卫星载荷的使用灵活,卫星根据这三库信息完全自主控制卫星载荷工作。根据不同的载荷特点配置不同的作业模板库,使得本方法具有很好的通用性。
本方法既可以在日常在轨作业管理中节省了地面运控系统、测控系统的大量工作;又可以在突发情况下的灵活变更作业。
如图1所示近地轨道卫星自主作业管理系统包括三库(作业模板库、重点区域库、作业策略库)、两队列(作业队列、指令队列)、两模块(作业策略解释模块、作业项解释模块)。

作业模板库用于存储常用的卫星载荷工作参数配置。其数据结构以模板编号为索引的一维数组,如表1所示。数组中每一个单元为一个作业模板项,数据结构如表2所示。

表1 作业模板库数据结构

表2 作业模板项数据结构
表2所示的作业模板项为一种通用的作业模板。卫星上不同的载荷作业模板通过作业模板项中的载荷类型码进行区分。例如某载荷的作业控制参数只有4个,分别长度为8个字节、4个字节、12个字节、30个字节。那么对于这个载荷的作业模板中控制参数A长度为8,控制参数B长度为4,控制参数C长度为12,控制参数D长度为30。控制参数区中为这4种54个字节的数据。作业模板项中的控制参数E到J长度都是0。
重点区域库用于存储需要载荷开机工作的星下区域。其数据结构为以重点区域编号为索引的一维数组,如表3所示。数组中每一个单元为一个重点区域项,如表4所示。每一个重点区域项包括经度1、经度2、纬度1、纬度2,4个弧度值。在这2个经度、2个纬度之间的区域为一个重点区域。

表3 重点区域库数据结构

表4 重点区域项数据结构
一般卫星载荷对地工作都有一定的幅宽。卫星实际工作区域不同于星下点经过区域。如图2中所示,当卫星经过星下点区域纬度E、纬度F、经度B、经度C所包围的范围时,其载荷对地工作实际扫描的区域为纬度E、纬度F、经度A、经度D所包围的范围。重点区域的范围由实际工作需求、载荷工作特点及载荷工作模式相关,当载荷具有可转动的探头或卫星可滚动、俯仰机动时更是如此。

作业策略库用于存储作业策略。其结构为作业策略编号为索引的一维数组,如表5所示。数组中每一个单元为一个作业策略项,如表6所示。每一个作业策略项包括本规则是否被激活信息、关联作业模板项编号、关联重点区域项编号、工作时间上限、工作时间下限、24小时内执行本作业次数上限、优先级、工作时间排序方式、起始终止时间段限制等信息。

表5 作业策略库数据结构

表6 作业策略项数据结构
作业队列用于存储作业。该队列的数据结构为循环队列。队列中作业项按执行起始时间从小到大排序。作业项的数据结构如表7所示。 作业策略解释模块根据作业策略库中的规则,查询作业模板库、重点区域库中相关信息生成作业序列插入到作业队列中。其工作流程如图3所示。
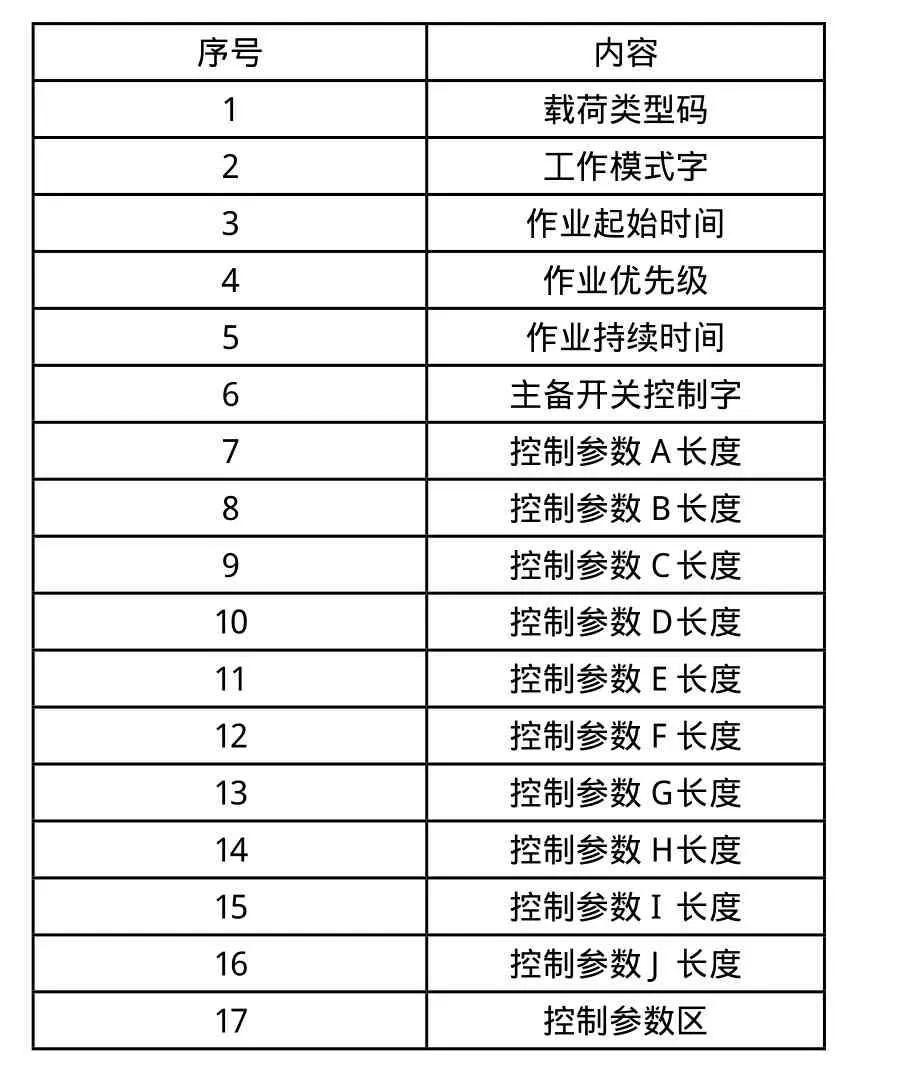
表7 作业项数据结构

表8 指令项数据结构

图3 作业策略解释模块运行流程
作业解释模块查询作业队列中执行起始时间小于等于当前卫星系统时间的作业,根据优先级大小删除资源使用冲突的作业,并把该作业解释成指令序列插入到指令队列中。当同一时间段同一载荷有多个作业时执行优先级高的作业。其工作流程如图4所示。

图4 作业解释模块运行流程
3 结论
本文中卫星根据地面预注的作业模板库、重点区域库、作业策略库自动生成作业,控制载荷系统工作。通常情况下,卫星被要求飞临重点区域时在能源足够的情况下载荷系统尽量多开机。本方法中的近地轨道卫星自主作业管理系统完全可以满足这样的使用要求。当把重点区域设置成几个可以覆盖全球的大块区域,在作业策略中圈选择规则设置为随机排序、天内最多作业数设置为1,就可以实现每天进行全球范围内的一次探索性开机工作。本方法既满足了常规性作业管理又可以进行探索性作业设置。卫星的绝大部分作业管理工作通过发射前预先设置作业模板库、重点区域库、作业策略库完成。在轨期间也可遥控注数修改这3个库。卫星间隔固定时间调用作业策略解释模块生成控制载荷工作的作业项。对于临时决策的紧急作业可通过遥控注数直接把设置为高优先级的作业项上注到作业队列中。这样可实现对卫星的实时控制。通过使用近地轨道卫星自主作业管理系统可以实现长期无人值守而完成任务,也可以通过人工干预更新这3库内容而提高近地轨道卫星的使用效能,在突发任务情况更是简单的注数就可完成任务变更。
