全液压自动猫道钻杆运移系统设计及仿真分析
2014-07-18张鹏于萍王清岩张春鹏
张鹏,于萍,王清岩,张春鹏
(吉林大学机械科学与工程学院,吉林长春130025)
当前,国内井场钻井平台作业施工中,钻具上下钻台过程仍以人工操作为主,其强度大而且不安全,完全不能满足石油钻井、大陆科学钻探等频繁上下钻杆的要求[1]。为此,结合我国深部大陆科学钻探的施工要求,课题组自主研发了全液压自动猫道。钻杆运移系统是全液压自动猫道的重要组成部分。该系统能在钻井作业中将管状类钻具 (钻杆、钻铤、套管等)由地面钻杆摆放架自动运移到猫道的平台上,当完成作业时,再将管状类钻具运移到地面摆放架,代替了人工上下钻具、使用钻台和猫道上的气动绞车拉、拽钻具等高危险、半自动化的操作[2-3]。
1 钻杆自动运移系统的结构设计
根据钻杆运移系统的要求,结构设计如图1所示。
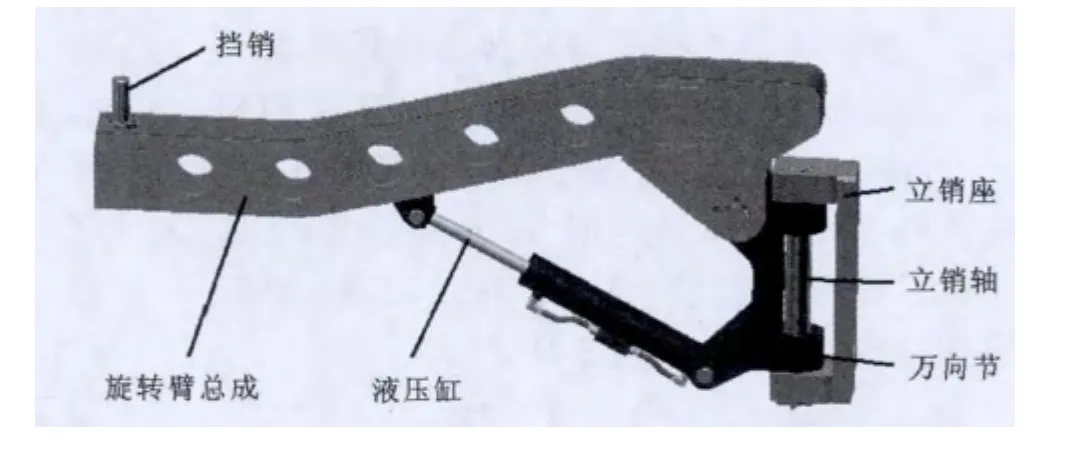
图1 钻杆运移系统示意图
钻杆运移系统主要由旋转臂总成、液压缸、万向节、立销轴、立销座、挡销等组成。其工作原理是钻杆放在钻杆运移系统挡销端时,液压缸杆开始伸出,旋转臂总成前端抬起,钻杆沿着曲面结构的旋转臂总成向猫道平台滚动。当滚落到一定位置,可通过液压缸调节流量,减小钻杆滚落速度,速度直至减小为零,从而减小钻杆对猫道平台上挡销的冲击。
旋转臂总成、液压缸以及万向节是通过销轴连接,保证钻杆运移系统上下翻转。万向节与立销座通过立销轴连接,万向节可实现钻杆运移系统上下、左右转动。当左右转动时,即可将钻杆运移系统顺置在猫道平台一侧,方便运输。旋转臂总成上表面的曲线结构实现钻杆在滚动的过程中速度的很好的控制[4-5]。
2 钻杆运移系统的运动学仿真
钻杆进入猫道平台的过程中,其速度过大会对猫道平台上面的挡销产生很大的冲击甚至会直接滚入猫道平台内造成事故,而速度过小又会卡在猫道平台与钻杆运移系统之间[4],所以通过对钻杆运移系统中的液压缸杆设定不同的起升速度,来观察钻杆与旋转臂之间的接触力变化情况以及钻杆滚动的快慢。通过仿真分析来确定最合适的起升速度。
2.1 钻杆运移系统的仿真模型
根据系统模型的实际运动情况,在构件间建立相应的约束运动副,这些运动副可以使被约束构件间具有一定的运动关系,从而使模型中各独立的部件相互联系在一起,按照设计的运动轨迹实现运动。使用ADAMS/View中的函数编辑器定义相应的钻杆运移系统运动。钻杆运移系统机构的仿真模型如图2、3所示。
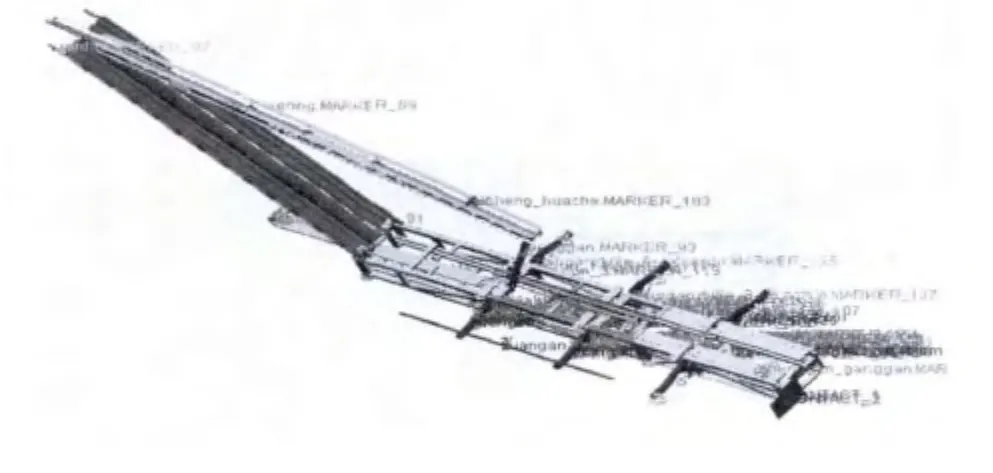
图2 液压猫道整体仿真模型

图3 液压猫道局部仿真模型
ADAMS仿真中放置两个钻杆运移系统,间距4.7 m,初始位置为钻杆运移系统旋转臂前端水平,钻杆与旋转臂设置Contact,接触参数根据材料属性添加[6]。
当钻杆到达可自由滚落位置时,油缸可给较小流量或亦可保持不动,从而钻杆以较小速度滚入液压猫道平台。由于在施工中多应用直径为127 mm的钻杆,故以下对127 mm钻杆进行仿真分析。
2.2 钻杆运移系统的接触力计算

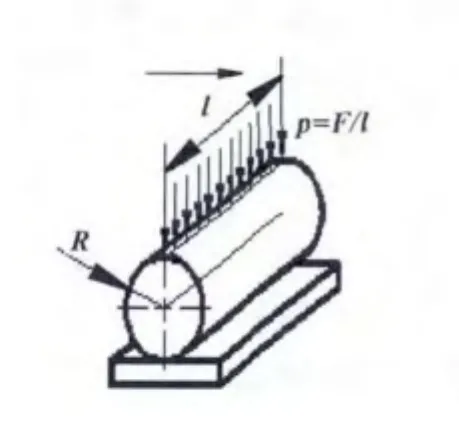
图4 钻杆与旋转臂接触应力示意图
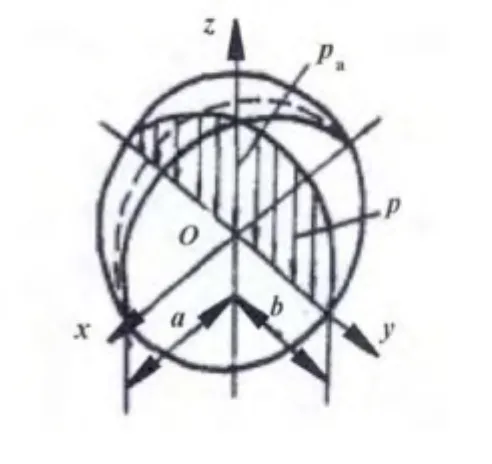
图5 接触面上的应力分布
2.3 钻杆运移系统的仿真曲线
油缸速度通过IF函数[9]设定,当设定驱动函数为IF(time-3:35,30,20)时,仿真分析可得钻杆与钻杆运移系统接触力变化曲线和钻杆速度变化曲线,如图6—8所示。

图6 127钻杆与钻杆运移系统1接触力曲线 (一)
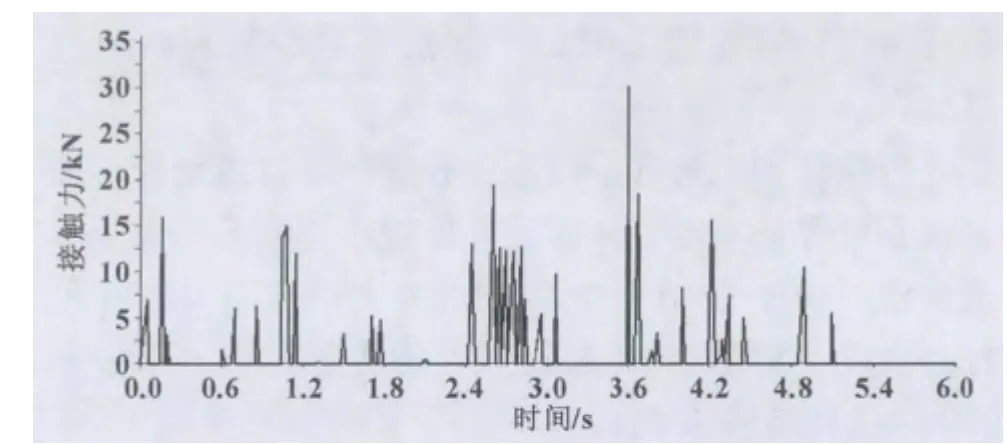
图7 127钻杆与钻杆运移系统2接触力曲线 (一)

图8 127钻杆速度曲线 (一)
由图6与图7知:当两个钻杆运移系统的液压缸同时驱动时,钻杆在两个钻杆运移系统上滚动所产生的接触力也会有所区别,钻杆运移系统1比钻杆运移系统2冲击大,钻杆运移系统2受力相对稳定。
由图6与图7知:接触力消失的时间表示钻杆已脱离钻杆运移系统,即钻杆滚离钻杆运移系统所需时间为5.20 s。由图8可以发现:当钻杆滚离钻杆运移系统时 (t=5.20 s时),钻杆的末速度为 1 992 mm/s,在滚动过程中速度较平稳。
当设定驱动函数为 IF(time-3:25,20,10)时,仿真分析可得钻杆与钻杆运移系统接触力变化曲线和钻杆速度变化曲线,如图9—11所示。

图9 127钻杆与钻杆运移系统1接触力曲线 (二)
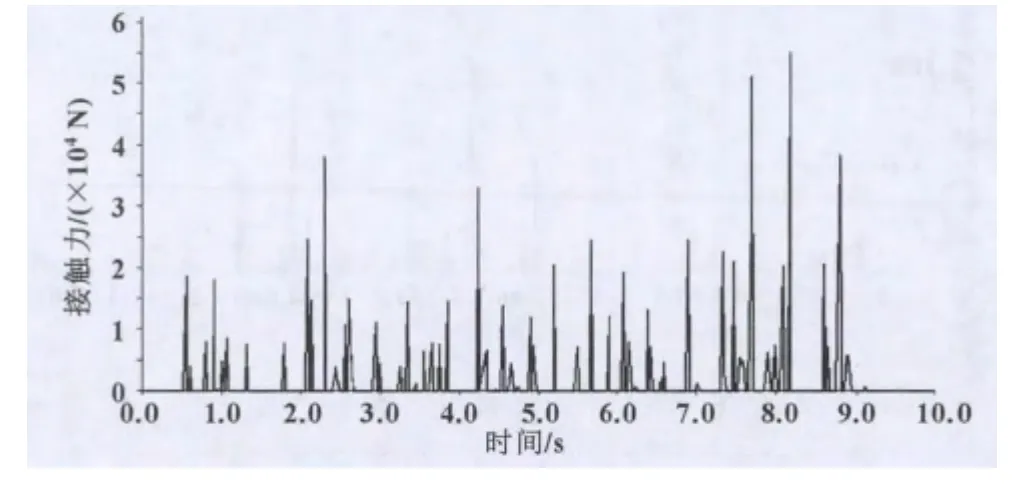
图10 127钻杆与钻杆运移系统2接触力曲线 (二)

图11 127钻杆速度曲线 (二)
钻杆运移系统的驱动速度变小后,观察图9与图10知:钻杆运移系统1受力不平稳,相对钻杆运移系统2受的冲击力大,而钻杆运移系统2受力相对平稳且冲击力较小。
由图9知:接触力消失的时间表示钻杆已脱离钻杆运移系统,即钻杆滚离钻杆运移系统所需时间为9.10 s。由图11可以发现:当钻杆滚离钻杆运移系统时 (t=9.10 s时),钻杆的末速度为1 650 mm/s。
通过改变驱动速度,得到钻杆与钻杆运移系统间的接触力和钻杆滚落速度的对比曲线,知驱动速度变慢后接触力变大而且接触时间过长,钻杆滚落变得不稳定。但是驱动速度变慢后,钻杆滚入猫道平台时的速度会减小,对平台挡销的冲击力减小。2.4 钻杆运移系统关键部位的应力分析
钻杆运移系统在抬起的过程中,活塞杆承受很大的压力,因此有必要对活塞杆进行应力分析,以确定所选取的液压缸是否满足工作要求。将活塞杆做柔性体分析,得到活塞杆10个点应力值,如图12和13所示。

图12 活塞杆应力分析示意图

图13 活塞杆各点应力值
由图13可知:从所选取的10个点中应力最大值为515 MPa,远小于液压缸杆的屈服强度[10]。所以可得出结论:所选取的液压缸满足工作要求。
3 结论
(1)建立了钻杆运移系统模型,钻杆运移系统采用曲面支撑结构,解决了钻杆滚入猫道平台过程中钻杆滚落速度很难控制的问题。
(2)通过对接触力和钻杆速度的分析,油缸速度在30时,具有钻杆与钻杆运移系统间的接触力较小、钻杆滚落时速度平稳、滚落时间短的优点,符合快速、平稳、自动运移钻杆的要求。
(3)运用ADAMS/Durability插件对钻杆运移系统液压缸杆应力分析得出结论:所选液压缸满足运移钻杆的强度要求。
[1]赵淑兰,李文彪,聂永晋,等.动力猫道技术国内外现状和发展趋势[J].石油矿场机械,,2010,39(2):13 -15.
[2]尹晓丽,牛文杰,张中慧.钻杆自动传送系统及设计方案[J].石油矿场机械,2009,38(7):42 -46.
[3]张春鹏,于萍,张鹏,等.超深井钻机顶驱减速箱的结构设计与仿真[J].辽宁工程技术大学学报,2013(2):157-160.
[4]寇红涛,崔建春,刘海伟,等.液压动力钻杆排放猫道设计与应用[J].石油机械,2008,36(9):29 -30.
[5]刘承建.液压猫道装置:中国,CN 101761313 A[P].2010-06-30.
[6]郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2007.
[7]章希胜,武震,张景春.机械零件的接触应力计算[J].机械,2000,27(1):24 -26.
[8]杨义勇.机械系统动力学[M].北京:清华大学出版社,1997.
[9]钟小勇,李凤英.ADAMS函数的使用技巧[J].装备制造技术,2008(11):100 -102.
[10]刘鸿文.材料力学[M].4版.北京:高等教育出版社,2004.