液压挖掘机工作装置多模式功率自动控制系统设计
2014-07-18周潜陈海虹陈乾林陈明强
周潜,陈海虹,陈乾林,陈明强
(1.贵州大学机械制造及其自动化学院工程机械系,贵州贵阳550025;2.贵州理工学院机械工程学院,贵州贵阳550003)
在土石方作业中,由于土壤类别、土壤级配和土壤含水率等不同使土的力学性能差别很大,因此,针对千差万别的土壤负载,液压挖掘机要耗费的能量往往差别很大。实际工作中,一般是靠操作人员对所需挖掘力大小进行主观判断,然后使用手动功率调节系统进行操作。显然,这种功率调节方式主观性大,发动机的功率也不能得到有效利用,液压挖掘机的工作效率也会受到一定影响。
以下介绍了一种适用于多种工况下的液压挖掘机工作装置功率调节自动控制系统的设计,该系统实现了液压挖掘机工况和功率的自动合理匹配,从而降低操作人员的劳动强度、减少系统的能量损失、提高系统精度、增强系统灵敏度和提高作业工作效率,最终提高整机性能。
1 工况研究
根据液压挖掘机的不同作业情况和要求,可以把它的工况分为6种,相应地发动机也有6种功率模式,能够基本满足压挖掘机的不同作业情况和要求。下面以日本五十铃AH-4HK1X柴油机为研究对象,其额定转速ne为2 000 r/min,怠速nD为 1 000 r/min。可以得出不同功率模式下,柴油机转速的对应关系,如表1所示。

表1 工作模式-柴油机转速匹配表
在此功率模式下通常,S、C和L工作模式统称为S(Saving Power Mode)——经济模式。
2 方案设计
2.1 总体设计
液压挖掘机工作装置功率调节自动控制系统的总体方案如图1所示。
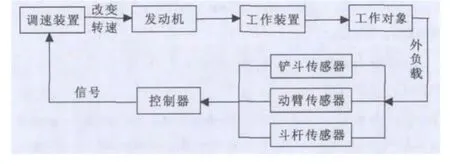
图1 液压挖掘机工作装置功率调节自动控制系统的总体方案
工作对象将外负载的情况传递给压力传感器,传感器将信号传递给控制器,控制器发出信号控制调速装置。然后对发动机的转速进行调节,使其与外负载所需的功率自动相适应,这样操作人员就能从频繁手动设定功率模式的操作中解放出来,最终实现液压挖掘机工作装置功率调节的自动化控制。
2.2 硬件设计
2.2.1 单片机的选择
采用单片机STC90C516RD+作为核心控制元件,具体的型号为STC90C516RD+40I-PDIP40,是宏晶科技STC新推出的一款单片机,具有低功耗、抗干扰能力超强、容量大、运行速度快和低功耗等特点。由于其内核仍然是51单片机,所以与传统8051单片机的指令完全兼容,不会影响程序的编写。因此,在软件设计中如果找不到系统所选单片机的型号,可以选择软件中存在的其他相应的51单片机进行替换。
2.2.2 传感器的选择
液压挖掘机工作装置功率调节自动控制系统的信息采集是通过3个压力传感器来获取的,它们分别安装在铲斗油缸、斗杆油缸和动臂油缸上。文中针对一款工作压力为0~32 MPa的20 t液压挖掘机进行研究,选用的压力传感器的工作范围要大于32 MPa。选用西德福P33S3B086002压力变送器作为工况信息采集装置,其测量范围为0~40 MPa。
2.2.3 电路图设计
系统的工况采集电路采用3条相同数据采集通道,依次采集铲斗油缸、斗杆油缸和动臂油缸的侧压力信息,然后由单片机对这组数据进行分析和处理。图2为工况采集电路。

图2 工况采集电路
单片机首先要对每组数据进行分析处理,然后输出控制信号,最后通过功率控制电路对发动机进行控制,从而实现液压挖掘机工作装置功率自动调节,图3为控制电路图。

图3 功率控制电路图
2.3 软件设计
2.3.1 主程序系统
液压挖掘机工作装置功率调节自动控制系统刚开始工作是处于怠速模式 (即功率模式D),通常情况系统自动进入功率调节自动控制模式 (即自动模式)进行功率自动调节,如果操作人员对液压挖掘机的操作技巧非常熟练可直接通过按键进行功率调节。(有键按下指的是在自动模式和人工模式中选择哪种模式。)主程序流程图如图4所示。
2.3.2 初始化子程序流程图
液压挖掘机刚开始工作时,系统处于怠速模式(即功率模式D),无报警,显示默认自动模式。初始化子程序流程图如图5所示。

图4 主程序流程图

图5 初始化子程序流程图
2.3.3 自动模式子程序设计
压力变送器对压力信息进行采集并送入单片机进行处理,然后根据处理结果进行越界判断和处理或者进行功率调节,最后通过LCD1602对目前的工作状态进行显示,自动模式子程序流程如图6所示。
2.3.4 人工模式子程序设计
按键被按下才能进入人工模式,然后通过按键处理的结果进行功率控制,最后通过LCD1602对目前的工作状态进行显示,人工模式子程序流程如图7所示。

图6 自动模式子程序流程图
3 建模与仿真

图7 人工模式子程序流程图
对6种自动模式进行调试与仿真,以下为自动模式下的H模式的仿真结果,当一组信息 (依次采集铲斗油缸、斗杆油缸和动臂油缸的侧压力)中最大值在 (28.8,32]MPa时,系统进入自动模式下的H功率模式。由于系统没有在液压挖掘机上进行实物实验,所以在进行软件仿真时可以设定一组与H模式相对应的数据:Data1=28.8 MPa,Data2=32 MPa,Data3=25.6 MPa。此时输入为一组经过模/数转换后的数字信号,输出涉及三种状态:进行功率模式H的控制,显示当前工况。这个过程主要涉及单片机的变量P0口、P1口和P2口,其理论变化过程应该为:
P1口:0XE9(铲斗油缸压力信息)→0XFC(斗杆油缸压力信息)→0XD6(动臂油缸压力信息)
P0口:0X63(上一个状态)→0X6B(功率锁存)→0XE3(显示锁存)
P2口:0XCD(功率控制)→……→0X48(显示)
自动模式下的H功率模式仿真图如图8、图9和图10所示。
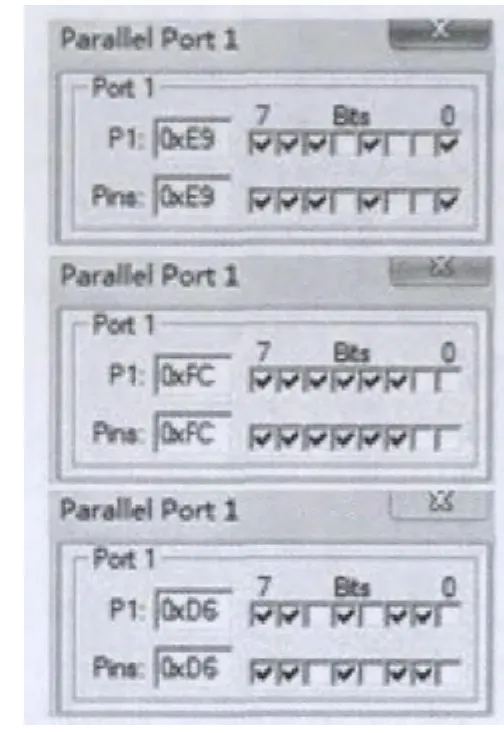
图8 H功率模式P1口仿真图
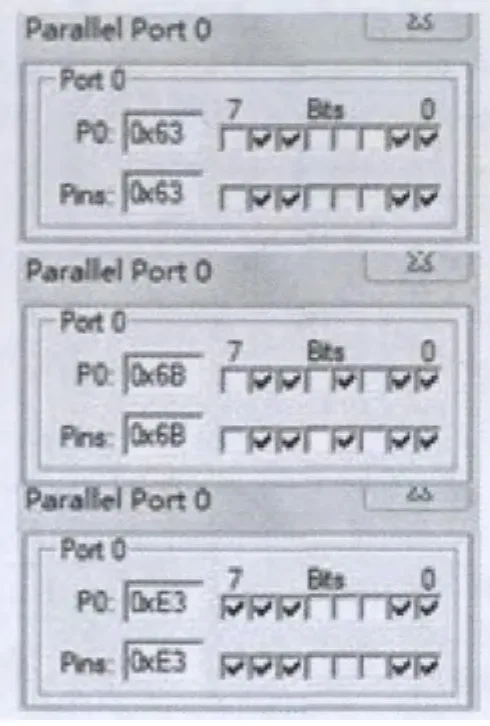
图9 H功率模式P0口仿真图

图10 H功率模式P2口仿真
通过对上述模式的仿真,不难看出当外界工况发生变化时,该自动控制系统能够较好地与之匹配,及时对调速装置发出控制信号,使发动机转速发生变化,使其较好适应当下工况。从而完成对液压挖掘机工作装置多模式的功率自动控制系统。
4 结论
针对传统的液压挖掘机需要进行人工调节功率而导致的主观性大、工作强度高、工作效率低和节能性差等不足,设计出液压挖掘机工作装置多模式功率自动控制系统,通过仿真得出:该自动控制系统能够较好地适应外界负载的变化进行工作模式自动选择,系统具有较高精度和灵敏度,从而实现提高作业工作效率、减少系统能量损失、降低操作人员的劳动强度,最终提高整机性能。
[1]胡俊杰.多片式MOCVD系统温度控制方法研究与实现[D].西安:西安电子科技大学,2009.
[2]陈正利.我国液压挖掘机发展的几个重要阶段及其前景展望[J].建筑机械,1999,1(1):18.
[3]王剑华.有效提高液压传动效率的途径[J].机械制造,2004(7):56-57.
[4]朱建新.液压挖掘机振动掘削机理及其过程优化建模与智能控制策略研究[D].长沙:中南大学,2008.
[5]刘世亮.挖掘机液压系统节能控制的分析研究[D].兰州:兰州理工大学,2009.
[6]HELDUSER S.Electric-hydrostatic Drive-aninnovative Energy-saving Power and Motion Control System[C].Proc.Inst.Mech.Engrs,1999,213(5):427 -437.
[7]BURMAN Richard,Design Systems and Communication Links[J].Automotive Engineer,1997,22(10):32 -34.
[8]程度旺.多功能液压挖掘机负载功率匹配研究[D].长沙:中南大学,2007.
