电动缸伺服控制系统老化试验
2014-07-18韩丽洁许昌
韩丽洁,许昌
(中国计量学院机电工程学院,浙江杭州310018)
在平台驱动方式中,电动驱动方式与气动和液压相比,有其自身的优点。气动方式的机械特性比较“软”,承载能力较小,控制精度不高,适用于轻载场合;液压驱动方式有承载能力强、控制精度高、响应速度快、调速范围宽等优点,但维护成本较高,并且液压缸的噪声相对较大 (85 dB)。电动缸通过滚珠丝杠将电机的旋转运动转化为推杆的直线运动,带负载能力强,响应快、定位精度高、维护量小,效率达65% ~75%,并且噪声也大为降低[1]。最新的直线执行器产品噪声等级已低于45 dB,较传统气动液压方式具有显著优势。
研制了一款用于平台驱动的电动缸,并用FX3G-PLC、交流伺服驱动器,设计了老化试验装置,通过软件编程即可实现三轴运动,比采用定位模块更加简便高效。试验对电动缸进行了负载能力、噪声水平等指标的测试。结果表明,所研发的电动缸符合设计要求。
1 电动缸结构及试验平台
电动缸 (图1)是将电机的回转运动转化为丝杠副的直线往复运动。主要由丝杠副、减速器、电机、承载套筒等组成。电机通过减速器将扭矩传递于丝杠,丝杠副螺母做直线运动。套筒与螺母固连,套筒一端连接平台。螺母做往复直线运动时,套筒推动平台同步做升降运动[2]。根据电机与丝杠主轴的安装位置,可以采用垂直式 (丝杠与电机主轴在同一直线上)、折返式 (丝杠主轴与电机主轴平行)等形式。

图1 电动缸结构示意图
试验平台所承受负载为250 kg,整套装置包含两个基本框架:上平台框架和下平台框架,如图2(a)所示。3个电动缸安装在两个框架之间。上框架为动平台,与3个电动缸通过万向头连接,提供运动环境;下框架通过螺栓固定在地面上[3]。平台尺寸:中位高度320 mm,长1 690 mm,宽740 mm;前侧两缸跨度630 mm;前后电动缸间距560 mm。建立如图2(b)所示空间坐标系。并结合实际情况,给出技术指标表1。

表1 技术指标

图2 平台机械图及其空间坐标系
2 系统工作原理
该系统从整体上看是一个高精度的半闭环伺服运动控制系统,由计算机控制部分、伺服驱动部分和电动缸三部分构成,其工作原理如图3。系统的控制核心为PLC,上位机主要实现电动缸轨迹代码的生成、程序编写、实时监控和修改等,并通过总线向PLC发送在线命令。伺服驱动器选择位置控制方式,接收PLC发送的一定数量和频率的脉冲,控制电机正反转,进而带动丝杠直线运动。实际应用中平台负载为变化值,一定电压对应的平台位移大小会随负载的变化而变化,因此每个电动缸都装配有光电编码器,实时采集当前电动缸位移,并反馈给驱动器,从而形成闭环控制,提高了位置精度[4-5]。同时为了防止丝杠在往复运动中发生超程现象,在电动缸的底端和顶端都安装有限位开关,以保证电动缸平稳运行。
试验中电动缸行程150 mm,推力2 500 N,最高速度250 mm/s,最大加速度12 mm/s2,丝杠导程5 mm。其配套伺服电机额定功率为750 W,转矩2.4 N·m,转速3 000 r/min。驱动器选用深圳众为兴公司生产的QS6系列,输入电源AC220 V,驱动电流20 A,具有位置控制、转矩控制、速度控制等多种控制方式,试验中主要应用脉冲+方向的位置控制方式,具体参数可参考手册[6]。

图3 系统工作原理图
参照QS6系列伺服驱动器手册[6]进行连线,如图4所示。三相电源线U、V、W与电机U、V、W一一对应相连,将编码器插头接入CN2,将PLC脉冲输出端口和旋转方向输出端口与驱动器相连。
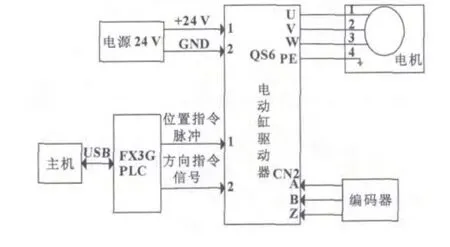
图4 控制系统接线图
3 系统程序设计
由于伺服电机的位移量与输入脉冲个数成正比,转速与脉冲频率成正比,所以需要对脉冲个数和频率进行精确控制。电动缸丝杠行程为150 mm,导程5 mm,单行程需PLC发送12 000个脉冲。由此可知每使电动缸走单个行程,需要电机转动30圈,且每圈需要PLC发出400个脉冲[7]。
整套程序中心采用表格设置定位指令 TBL[7-8],I/O分配如表2所示,Y0端口参数设置如图5。

表2 I/O分配表

图5 Y0端口参数设置
4 试验结果
在负载250 kg的承重下,按照如图6所示的流程进行老化试验,先垂直升降,再左右摇摆,然后前后俯仰,如此循环,连续运行4 h,并记录数据。表3、4、5分别是电动缸进行三自由度运动时的位移、速度等参数,表6是用AWA5636声级计测得的噪声值。

图6 试验流程

表3 垂直运动相关数据记录

表4 左右摇摆相关数据记录

表5 前后俯仰相关数据记录

表6 单缸噪声测量值
5 结论
对一款自行研制的伺服电动缸进行了老化试验。试验结果表明,该电动缸完全达到250 kg的负载要求,在规定时间内,仅存在少量发热问题;能够实现高、低速往复运动,定位精度较高;噪声低于65 dB,无尖锐摩擦声;稳定性好,具有较好的市场前景和应用价值。
[1]张小蓉,梁素兰.电驱动+电动缸系统在立体织物装备中的应用[J].中国制造业信息化,2007,36(17):63-65.
[2]许兵宗,卢博友,卢军党.一种联合收割机割台升降装置的设计与研究[J].农机化研究,2010(3):140-143.
[3]李绍安.某型战机飞行模拟器三自由度运动平台的研制[D].武汉:华中科技大学,2005.
[4]魏艳红,许昌.气动座椅平台的PLC控制系统设计[J].微计算机信息,2010,26(6):63 -65.
[5]杨俊杰,应义淼,曹军,等.伺服电动缸模拟地震的试验研究[J].土木工程学报,2010,43:531 -534.
[6]深圳众为兴技术股份有限公司,QS6伺服驱动器用户手册[M].深圳:众为兴技术股份有限公司,2011.
[7]闫娓,陈忠提,赵安.PLC触摸屏直接控制伺服电机程序设计[J].机床电器,2009(4):37-41.
[8]龚仲华.三菱FX系列PLC应用技术[M].北京:人民邮电出版社,2010.
