基于MATLAB的无刷直流电机的电流滞环控制仿真
2014-07-18袁川乐贵高
袁川,乐贵高
(南京理工大学 机械工程学院,江苏 南京 210094)
基于MATLAB的无刷直流电机的电流滞环控制仿真
袁川,乐贵高
(南京理工大学 机械工程学院,江苏 南京 210094)
针对无刷直流电机的转矩脉动,采用电流滞环控制来抑制脉动;在Matlab/Simulink环境下,基于直流无刷电机的数学模型、转速和电流双闭环控制策略来建立无刷直流电机电流滞环控制系统的各个独立模块如BLDC本体模块、速度控制模块、电流滞环模块、逆变电路模块、脉冲信号模块等,再进行各功能模块的连接,搭建无刷直流电机的控制系统仿真模型,并在给定参数下进行仿真分析。
无刷直流电机;转矩脉动;电流滞环控制
0 引言
无刷直流电机利用电子换向器取代了机械电刷和机械换向器,因此使这种电机不仅保留了直流电机的良好的机械特性和调速性能,而且体积小、速度快、可靠性好等优点,而且又具有交流电机的结构简单、运行可靠、维护方便等优点,使它一经出现就以极快的速度发展和普及。
但无刷直流电机一直存在着转矩脉动问题限制其在高精度系统中的应用,因此分析转矩脉动的产生原因及研究抑制转矩的方法一直是无刷直流电机的重要研究课题。针对换相时产生的转矩脉动,其抑制方法有:电流反馈、电流滞环、重叠换相、PWM斩波法等[1]。本文针对所用电机的特点及所需的精度要求,选择电流滞环控制来建模仿真无刷直流电机的实际运转情况,分析其机械特性为实际中的运用提供参考。
1 无刷直流电机的数学模型
无刷直流电机由定子三相绕组、永磁转子、逆变器、转子磁极位置检测器等组成,其转子采用瓦形磁钢,对其进行特殊的磁路设计,可获得梯形波的气隙磁场;定子采用整距集中绕组,由逆变器供给方波电流。假定无刷直流电机工作在两相导通星形三相六状态下,反电势是平顶宽度为120电角度的梯形波。为了便于分析无刷直流电机的数学模型及电磁转矩等特性,假定:
1) 三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称;
2) 忽略齿槽、换相过程和电枢反应等的影响;
3) 电枢绕组在定子内表面均匀连续分布;
4) 磁路不饱和,不计涡流和磁滞损耗。
则根据无刷直流电机的特性,可建立其电压、转矩方程。设ua,ub,uc为定子相绕组电压,ia,ib,ic为定子相绕组电流,ea,eb,ec为定子相绕组电动势,un为三相绕组中点电压,r为定子相电阻,L为每相绕组的自感,M为每两相绕组间的互感。则三相绕组的电压平衡方程可表示为:
(1)
若三相绕组采用星形连接方式,且有中线,则有:
ia+ib+ic=0
(2)
Mia+Mib=-Mic
(3)
将式(2)和式(3)代入式(1),经过简化,可得到电压方程:
(4)
(5)
无刷直流电机的电磁转矩是由定子绕组中的电流与转子磁钢产生的磁场相互作用而产生的。因此,电磁转矩方程式可表示为:
(6)
运动方程式为:
(7)
式中,w为电机的转动角速度rad/s,Te为电磁转矩,TL为负载转矩,J为电动机旋转系统的转动惯量,B为阻尼系数。
2 系统仿真模型的建立
在Matlab2011a的simulink环境下,由无刷直流电机的数学模型和控制策略分析,可建立控制系统框图如图1。
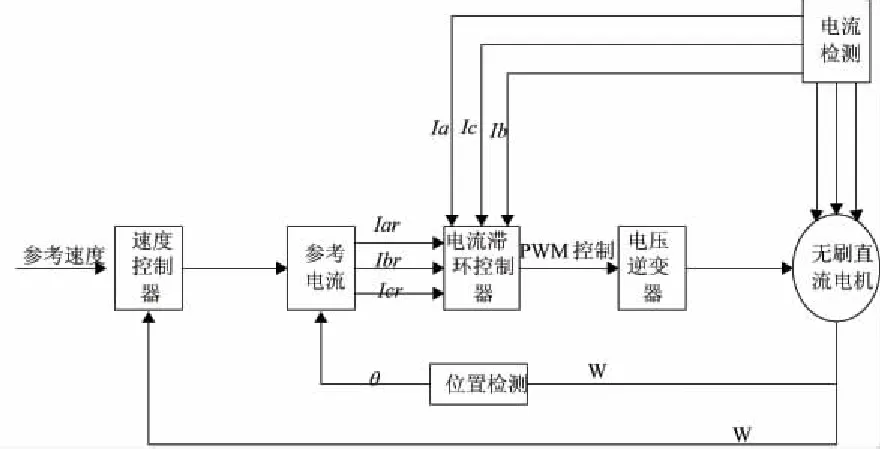
图1 BLDC系统控制框图
根据模块化建模思想,可以将图1所示的控制系统分割成若干个功能独立的子模块:BLDC本体模块、转速计算模块、转矩计算模块、速度控制模块、参考电流模块、电流滞环控制模块、中点电压模块、电压逆变器模块。将这些模块和S函数相结合,建立整个BLDC的控制系统的仿真模型,如图2所示。

图2 BLDC双闭环控制系统仿真模型
2.1BLDC本体模块
由电压平衡方程(即式(4)),可求出三相相电流,由转矩方程、运动方程(即式(6)、式(7))可求出转速,从而构建如图3所示的BLDC本体模块。
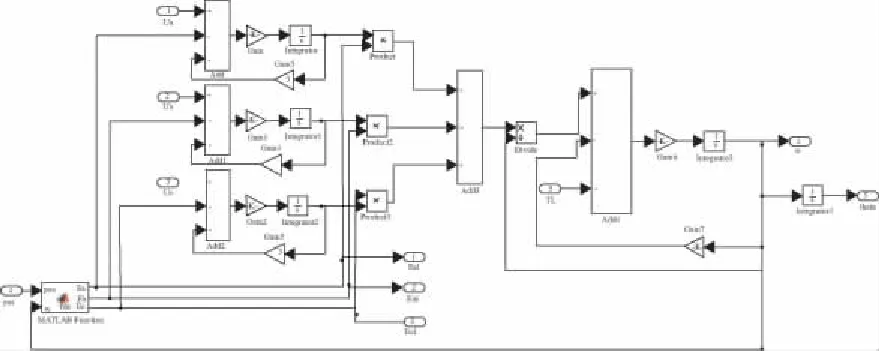
图3 BLDC本体模块
其中三相反电动势(ea、eb、ec)的求取采用分段线性法, 以第一阶段0~π/3为例,A相反电动势处于正向最大值Em,B相反电动势处于负向最大值-Em,C相反电动势处于换向阶段,由正的最大值Em沿斜线规律变化到负的最大值-Em。根据转子位置和转速信号,就可以求出各相反电动势变化轨迹的直线方程;其他5个阶段,也是如此。据此规律,可以推得转子位置和反电动势之间的线性关系,如表1所示,从而采用分段线性法,解决了在BLDC本体模块中梯形波反电动势的求取问题。
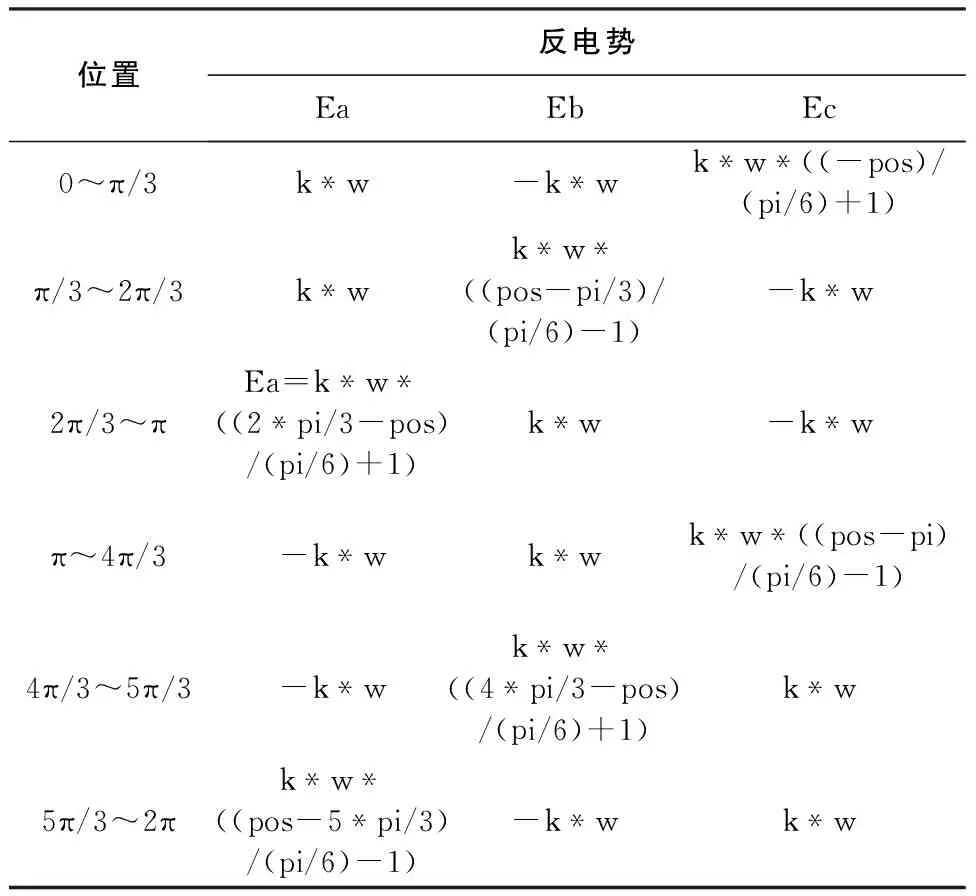
表1 转子位置与反电动势关系
2.2 速度控制模块
速度环采用PI调节控制,其模块结构框图如图4,输入为给定转速与实际转速的差值,输出为参考电流的幅值。

图4 速度控制模块
2.3 参考电流模块
参考电流是指根据电流的幅值信号Is和位置信号pos给出三相参考电流,其中参考电流和幅值信号Is及位置信号pos的关系如表2。按照表2的关系,用matlab中的s函数实现参考电流模块,其结构框图如图5所示。
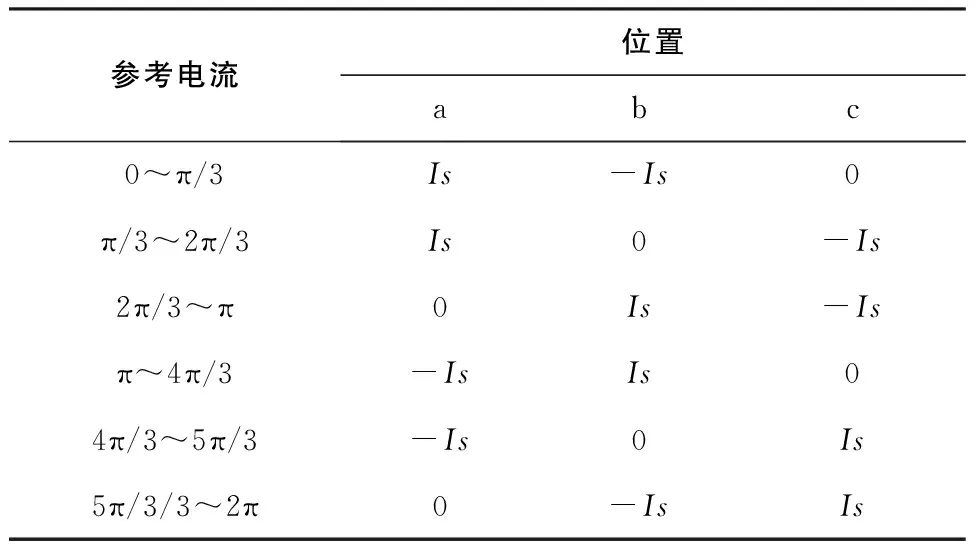
表2 转子位置与三相参考电流的对应关系

图5 参考电流模块
2.4 电流滞环控制模块
为了使实际电流跟踪参考电流的误差减小,电流环采用滞环控制。电流滞环控制模块的输入为三相参考电流和实际电流,输出为控制信号。当跟踪误差大于滞环宽度的上限时,其相应相的逆变器模块的上桥臂的IGBT开通,下桥臂断开;当跟踪误差达到滞环宽度的下限时,其相应相的逆变器模块的下桥臂开通,下桥臂断开。因此选择合适的滞环宽度,可以使实际电流不断的跟踪参考电流的波形。电流滞环控制模块如图6。

图6 电流滞环控制模块及其封装
2.5 逆变电路模块
利用Simpowersystem Toolbox中的模块,选用六个内部自带反并联续流二极管的IGBT开关元件,构成三相逆变桥。根据电流滞环控制器输出的斩波信号和转子位置信号,确定导通信号。其模块结构图如图7所示。
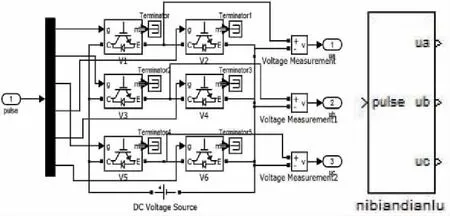
图7 逆变电路模块及其封装
2.6 脉冲信号模块
决定逆变电路导通的脉冲信号由斩波信号和转子位置信号两部分组成,其中转子位置信号与三相逆变桥中的IGBT驱动关系如表3所示。利用s函数实现表中的关系,再将逆变桥中三相上桥臂的驱动信号同电流滞环控制器输出的斩波信号相与生成三路信号,此三路信号和原来的三路下桥臂驱动信号构成六路脉冲信号。其结构框图如图8所示。
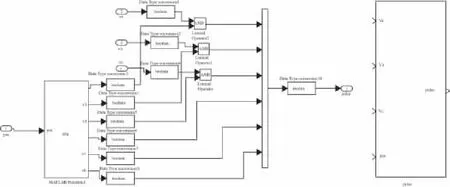
图8 脉冲信号模块及其封装
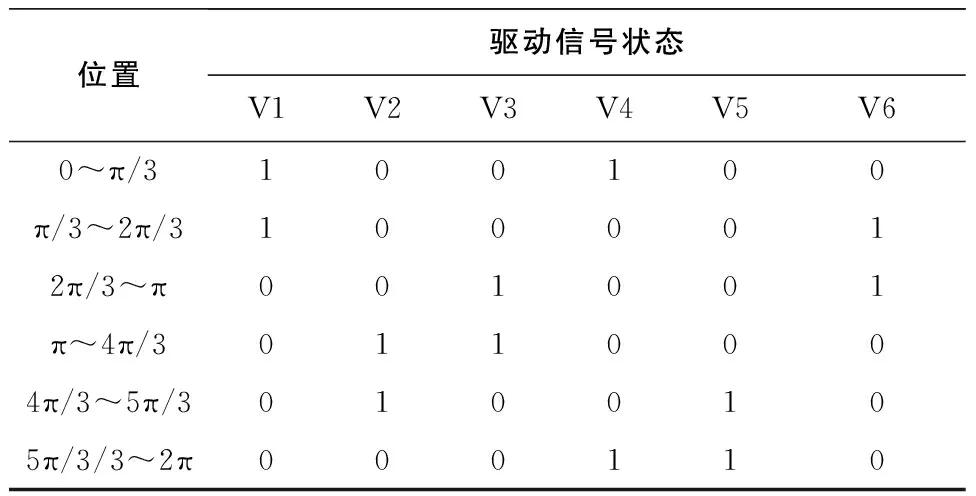
位置驱动信号状态V1V2V3V4V5V60~π/3100100π/3~2π/31000012π/3~π001001π~4π/30110004π/3~5π/30100105π/3/3~2π000110
2.7 转子位置计算模块
BLDC本体模块输出的theta是转子转过的机械角度,将其乘以极对数相应的倍数的电角度,再对2π求余,即可得转子位置信号。其结构如图9。

图9 转子位置计算模块
3 仿真结果
基于matlab/simulink建立了BLDC控制系统的仿真模型,并对该模型进行了双闭环串级控制系统的仿真。其中仿真参数如表4。

表4 仿真参数
为了验证所设计的BLDC控制系统在仿真过程中动、静特性,系统空载启动,待进入稳定状态后,在t=0.5s时,加负载TL=10N·m,可得电机A相反电动势、A相电流、转速曲线如图11-图13。
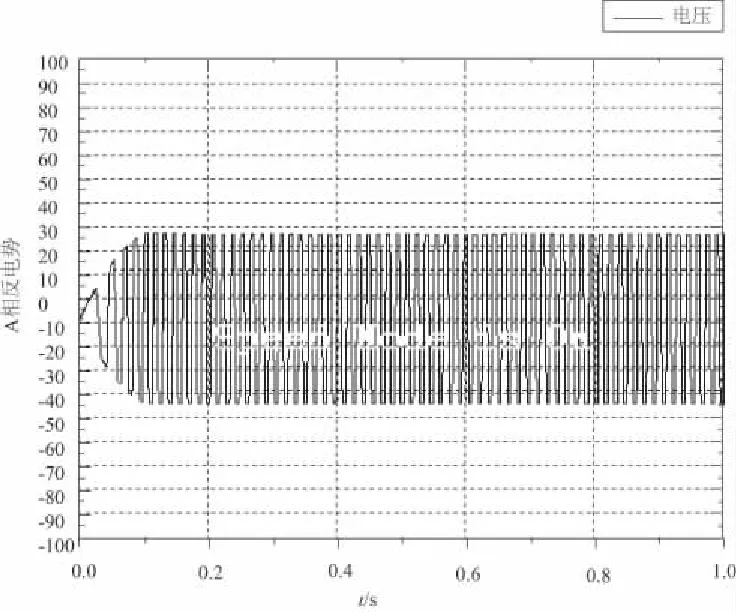
图11 A相反电势

图12 A相电流

图13 转速曲线
4 结语
由仿真波形可看出,在n=800r/min的额定转速下,系统响应快速而平稳,相电流和反电势波形较理想,转矩脉动得到一定程度的抑制,转速响应快,当加负载后转速并没有发生明显的变化,因此电机具有良好的动态特性。
[1] 董少波、程小华.无刷直流电机转矩脉动及抑制方法综述[J].微电机,2010,43(8):83-85.
[2] 赵卓鹏、贾石峰.电流滞环跟踪PWM逆变器控制仿真研究[J].电气传动自动化,2011,33(2):1-3.
[3] 朱雁南、赵军红、陈海军.无刷直流电机系统仿真建模方法[J].四川兵工学报,2012,33(10):88-92.
[4] 包向华、章跃进.基于Simulink的永磁无刷直流电机及控制系统的建模仿真[J].电气传动自动化,2005,27(4):30-32.
[5] 孙佃升、李思光.无刷直流电机的两种控制方式的研究[J].测控自动化,2011,27(7):79-81.
[6] 齐蓉、林辉、陈明.无刷直流电机换相转矩脉动分析与抑制[J].电机与控制学报,2006,10(3):287-290.
[7] 钟君柳、姜孝华.基于S-函数的无刷直流电机的建模研究[J].仿真技术,2007,23(3):273-275.
Simulation of Current Hysteresis Loop Tracking Control for Brushless DC Motor Based on Matlab
YUAN Chuan,LE Gui-gao
(School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China)
The current hysteresis loop tracking control is used to prevent the brushless DC motor from torque rippling. In the Matlab/Simulink environment, the independent modules of the brushless DC motor system the with current hysteresis loop tracking control are built based on its mathematical model and the speed and current double closed loop control strategy, such as BLDC ontology, speed control, current hysteresis, inverter circuit and pulse signal modules, which are connected to each function module to build a brushless dc motor control system simulation model and set up the paramters to do the simulation analysis.
brushless DC motor; torque ripple; current hysteresis loop tracking control
袁川(1989-),男,安徽马鞍山人,硕士研究生,研究方向为电机控制。
TP391.9
B
1671-5276(2014)02-0170-04
2013-01-21
