模糊神经网络PID控制在振动打桩机中的应用
2014-07-18彭阳阳汤炳新葛旭峰伏广臣
彭阳阳,汤炳新,葛旭峰,伏广臣
(河海大学 机电工程学院,江苏 常州 213022)
模糊神经网络PID控制在振动打桩机中的应用
彭阳阳,汤炳新,葛旭峰,伏广臣
(河海大学 机电工程学院,江苏 常州 213022)
针对双马达电液伺服系统难以进行同步控制,实现无级调频调矩的问题,提出了基于Mamdani型的模糊神经网络PID控制方法。该方法的主要思想是结合模糊推理和神经网络控制技术,构成模糊神经网络,实时调整PID参数。实验结果表明:与传统PID控制方法相比,该方法改善了系统的动态特性,提高了控制精度。
模糊神经网络;双马达电液伺服系统;同步控制
0 引言
应近几年国内基础行业的建设需要,如高层住宅、铁路、高速公路、桥梁、码头、电站等大、中型基础工程施工及地基处理,性能良好的振动打桩机的作用也越来越明显。 由于国内振动桩锤理论和打击力的无级调频调矩技术落后,如今的振动打桩产品已经无法满足市场的需求。
本文提出将模糊神经网络PID控制法用于偏心块式振动打桩机中,利用其模糊推理和自学习功能,以减小液压系统的泄漏,执行元素非线性等因素影响,达到提高同步控制精度的目的。
1 双马达电液伺服同步控制系统以及同步控制策略[1-2]
双马达电液同步控制系统如图1所示,微机控制器1、伺服放大板2和3、传感器13和14、开关按钮组25、数据采集卡26组成了电控柜系统;泵4和24、阀5和22、马达6和21、散热器23组成了液压系统;其他组成了机械结构系统即打桩头内部结构。

图1 双马达电液伺服系统结构图
工作原理如下:马达6和21驱动两组反向偏心块9、12和15、18。两马达同时旋转,两组偏心块反向旋转,横向离心力抵消,垂直方向力叠加,从而产生打击力。在整个沉桩过程中,两马达转速实现打击力频率改变,偏心块之间的相位差实现打击力矩的改变。
本文采用了复合式同步控制策略,速度的控制由内层控制器实现,外层采用主从式控制相位差。图2为控制策略方框图。
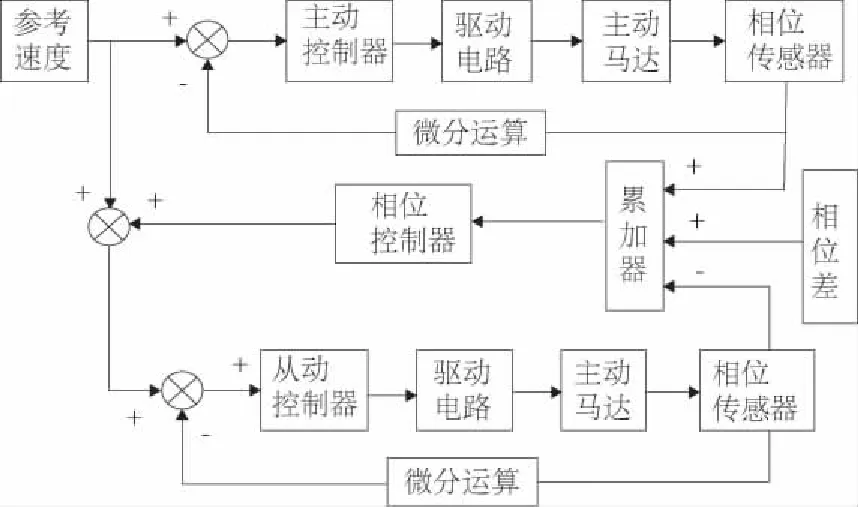
图2 同步控制系统方框图
2 模糊神经网络PID控制
模糊神经网络PID控制是在常规PID控制基础上,根据实际情况利用经验和技术知识进行学习,通过计算系统的误差和误差的变化率,在线实时的整定PID参数。具体基于模糊神经网络PID控制结构如图3所示。
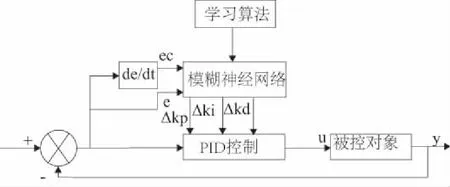
图3 模糊神经网络PID控制结构图
2.1 模糊神经网络结构原理
神经网络系统具有很强的自学习自适应功能[3],但却不适合表达基于规则的语言;模糊推理能够对控制规则进行计算推理,但本身不具备自学习自调整的功能。因此,将两者结合起来,模糊神经网络可以利用神经网络的学习机制补偿模糊控制系统缺乏有效的学习机制的缺点。
2.2 模糊神经网络的结构
基于Mamdani模型的模糊神经网络结构[4]如图4所示。
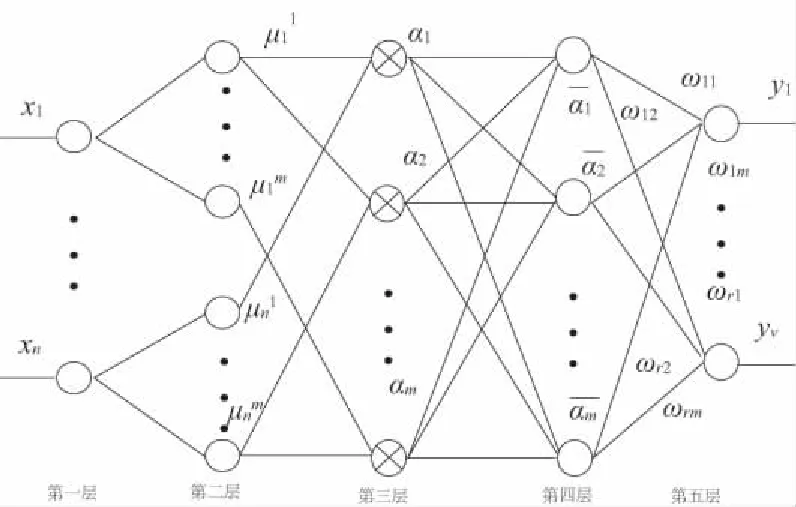
图4 基于Mamdani模型的模糊神经网络结构图
第一层:输入层,输入值传输到下一层。节点总数为:N1=n。
第三层:模糊推理层,每个节点代表一条模糊规则。该层的作用是匹配模糊规则的前件,计算出每条规则的适应度,即:
式中:i1∈{1,2,…,m1};i2∈{1,2,…,m2};…;in∈{1,2,…,mn};j=1,2…,m;模糊规则总数为:
第四层:归一化层,起归一化作用,即:
节点总数为:N4=N3=m
第五层:输出层,作用是清晰化,即:
节点总数为:N4=r;ωij相当于上面所述的隶属函数的中心值。
2.3 模糊神经网络的学习方法






得出参数调整的学习算法为:
学习速率β>0。
由以上可知误差e和误差ec是输入量处于神经网络的第一层,△Kp,△Ki,△Kd是其输出量所处第五层输出层。在本次实验中,液压马达额定转速2000r/min,所以e的基本论域为【-220rad/s,220rad/s】,ec的基本论域【-440rad/s。440rad/s】。经ZN法整定PID参数后,由模糊神经网络自学习和推理计算功能计算出PID参数变化量,获得精确的被控对象输入量。
3 实验结果与分析
对于不同的土壤,打桩机为了达到良好的沉桩效果,需要不断地调整激振器频率与激振力大小。为了模仿实际工作环境,假设双马达保持1500r/min不变,相位差在t=8s时从0°变化到180°,用PID控制和模糊神经网络PID控制分别对打桩机在沙土的环境下进行实验,实验结果如图5。
从上面实验结果可以看出:两种控制方法都能达到一定控制性能,但模糊神经网络能更好的跟踪速度的变化,且速度波动曲线比较平稳,在相位差突变时系统的动态性能的控制也明显优于PID控制,也就是说模糊神经网络PID控制的抗干扰能力更强。
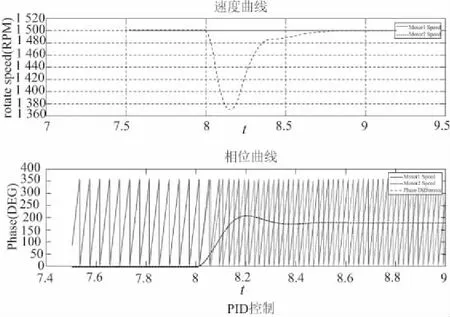
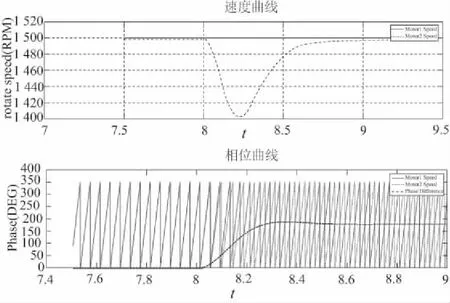
图5 模糊神经网络PID控制
4 结论
模糊神经网络PID控制具有调整过程平稳,跟踪效果好,能够根据双马达液压伺服系统实时工况下进行控制参数的在线调整,满足了高精度同步控制要求。
[1] 王玥,赵伟民,付海龙,等.振动打桩机偏心块的参数研究与有限元分析[J].机械工程师,2005(7):132-134.
[2] 汤炳新,王小虎,麻岳军,等.基于复合式同步控制策略和模糊PID控制算法的振动打桩机的智能控制器研究[J],机械工程学报,2011(12):2798-2801.
[3] 孙增圻.智能控制理论与技术[M].北京:清华大学出版社,2002:169-175.
[4] Takagi T Sugeno.Fuzzy identification of System and its application to modelling and contol[J].IEEE Trans Syst,Man and Cybern,1985,15(1):116-132.
Application of Fuzzy Neural Network PID Control in Vibration Pile Driver
PENG Yang-yang, TANG Bing-xin,GE Xu-feng, FU Guang-chen
(Hohai University Mechanical and Electrical Institute, Changzhou 213022, China)
The electro-hydraulic servo system with double motors is hard to be controlled synchronously and to be used to regulate the frequency and moment.this paper puts for ward a fuzzy neural network PID method based on Mamdani The main idea of the new approach is to constitute the fuzzy neural network with the real-time adjustment of PID control parameters through combining fuzzy reasoning with neural network control technology.Experimental results show that compared with the traditional PID control method,the proposed control method greatly improves the dynamic performance of the system and the control precision。
fuzzy neural network;electro-hydraulic servo system with double motors; synchronous control
水利部公益性行业科研专项(20071033)
彭阳阳(1987-)男,江苏南通人,硕士研究生,研究方向为机械检测与控制。
TP273+.4
B
1671-5276(2014)02-0126-02
2013-02-04
