基于Σ-ΔM的五阶MFLR数字微加速度计
2014-07-18杜松杰苑伟政常洪龙
杜松杰, 苑伟政, 陈 方, 常洪龙
(西北工业大学 空天微纳系统教育部重点实验室,陕西 西安 710072)
基于Σ-ΔM的五阶MFLR数字微加速度计
闭环控制系统*
杜松杰, 苑伟政, 陈 方, 常洪龙
(西北工业大学 空天微纳系统教育部重点实验室,陕西 西安 710072)
为了进一步抑制加速度计信号带宽范围内的噪声,提出并设计了一种基于Σ-ΔM的五阶多反馈谐振式(MFLR)微机械加速度计闭环控制系统,该系统通过增加额外的内部负反馈对量化噪声进行再一次整形。微机械加速度计结构为一种全差分式结构,在结构层厚度为60 μm、基底层厚度为400 μm的SOI硅片上,经过光刻、溅射、深度反应离子刻蚀等工艺步骤加工而成。整个闭环控制系统的Matlab/Simulink模型首先被建立,然后采用“单位圆分析法”进行系统参数的设定,系统仿真显示:当输入幅值1gn、频率128Hz的加速度信号时,加速度计的噪声为-136.2 dB,与传统五阶MF结构的Σ-ΔM闭环控制系统相比,在0~500 Hz信号带宽范围内的噪声降低了7.9 dB。最后整个系统在四层PCB电路板上进行了功能性验证和测试。
微机械加速度计; Sigma-Delta modulator(Σ-ΔM); 闭环控制; 高频段噪声
Σ-ΔM*
0 引 言
微机械加速度计由于其体积小、重量轻、可批量化生产等优点,在航空、航天、汽车、消费类电子等领域具有重要的应用前景[1~3]。微机械加速度计采用闭环控制的方法可以有效地提高其线性度、带宽和动态范围[4]。基于Sigma-delta Modulator(Σ-ΔM)的数字式闭环控制方案不仅具有模拟闭环控制的优点,而且能够克服“吸附现象”的发生[5],并直接输出数字脉宽密度调制信号,便于后端做进一步的数字信号处理。因此,该技术一直是国际上各个研究机构的研究重点和热点。
1990年,Henrion W[6]首先实现了微机械加速度计的二阶Σ-ΔM闭环控制系统,系统仅有二阶噪声整形能力;1994年, Smith T等人[7]在环路中增加一个电子积分器,实现了加速度计的三阶Σ-ΔM闭环控制系统,测试的系统噪声为10μgn/√Hz;2006年, Amini B V等人[8]通过在环路中串联2个电子积分器,实现了微机械加速度计的四阶Σ-ΔM闭环控制系统,系统噪声为4 μgn/√Hz;2005年,Kraft Michael[9]采用五Σ-ΔM的闭环控制方案,系统噪声降为1μgn/√Hz。但是,以往的这些设计均是基于高阶多反馈式(MF)Σ-ΔM结构,这种结构相对简单并易于实现,不过其对高频段量化噪声抑制能力有限,从而限制了加速度计性能的进一步提高。
本文结合全差分结构的SOI加速度计设计并实现了一种五阶多反馈谐振式(MFLR)Σ-ΔM闭环控制系统,能够进一步抑制噪声,增大加速度计可检测信号的带宽。
1 系统设计
1.1 微机械加速度计结构与加工工艺
全差分结构的单轴微机械加速度计如图1所示,中心质量块由4根弹性梁支撑,检测电容器Cs和反馈电容器Cf均采用变间距式梳齿结构。
微机械加速度计整体在结构层厚度为60 μm、基底层厚度为400 μm的SOI硅片上,经过光刻、溅射、深度反应离子刻蚀等工艺步骤加工而成。微机械加速度计的主要机械参数如表1所示。
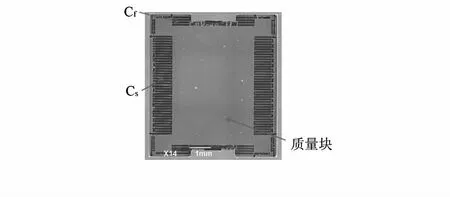
图1 微机械加速度计结构图Fig 1 Structure diagram of MEMS accelerometer
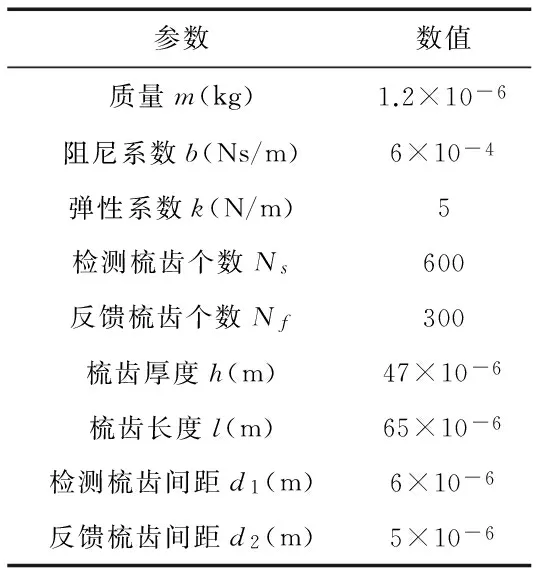
参数数值质量m(kg)1.2×10-6阻尼系数b(Ns/m)6×10-4弹性系数k(N/m)5检测梳齿个数Ns600反馈梳齿个数Nf300梳齿厚度h(m)47×10-6梳齿长度l(m)65×10-6检测梳齿间距d1(m)6×10-6反馈梳齿间距d2(m)5×10-6
1.2 系统建模与仿真
图2(a),(b)分别是微机械加速度计的五阶MF结构和五阶MFLR结构Σ-ΔM闭环控制系统的Matlab/Simulink模型。后者与前者相比,增加了局部负反馈环节g1和g2用于形成局部谐振器对系统高频段量化噪声作进一步整形。M(s)为微机械加速度计的二阶传递函数,积分器H1(z)、积分器H2(z)、积分器H3(z)与微机械加速度计串联形成五阶噪声整形;相位补偿电路Cp(z)用于增大闭环控制系统的相位裕量,以提高系统的稳定性;量化器(Quantizer)对信号进行采样量化,在理想条件下量化器模型可以等效为量化增益Kq与量化噪声QN的叠加[10];前置接口电容/电压转换增益为Kp,后级放大增益为Kbst,反馈电压/静电力转换系数为Kfb。
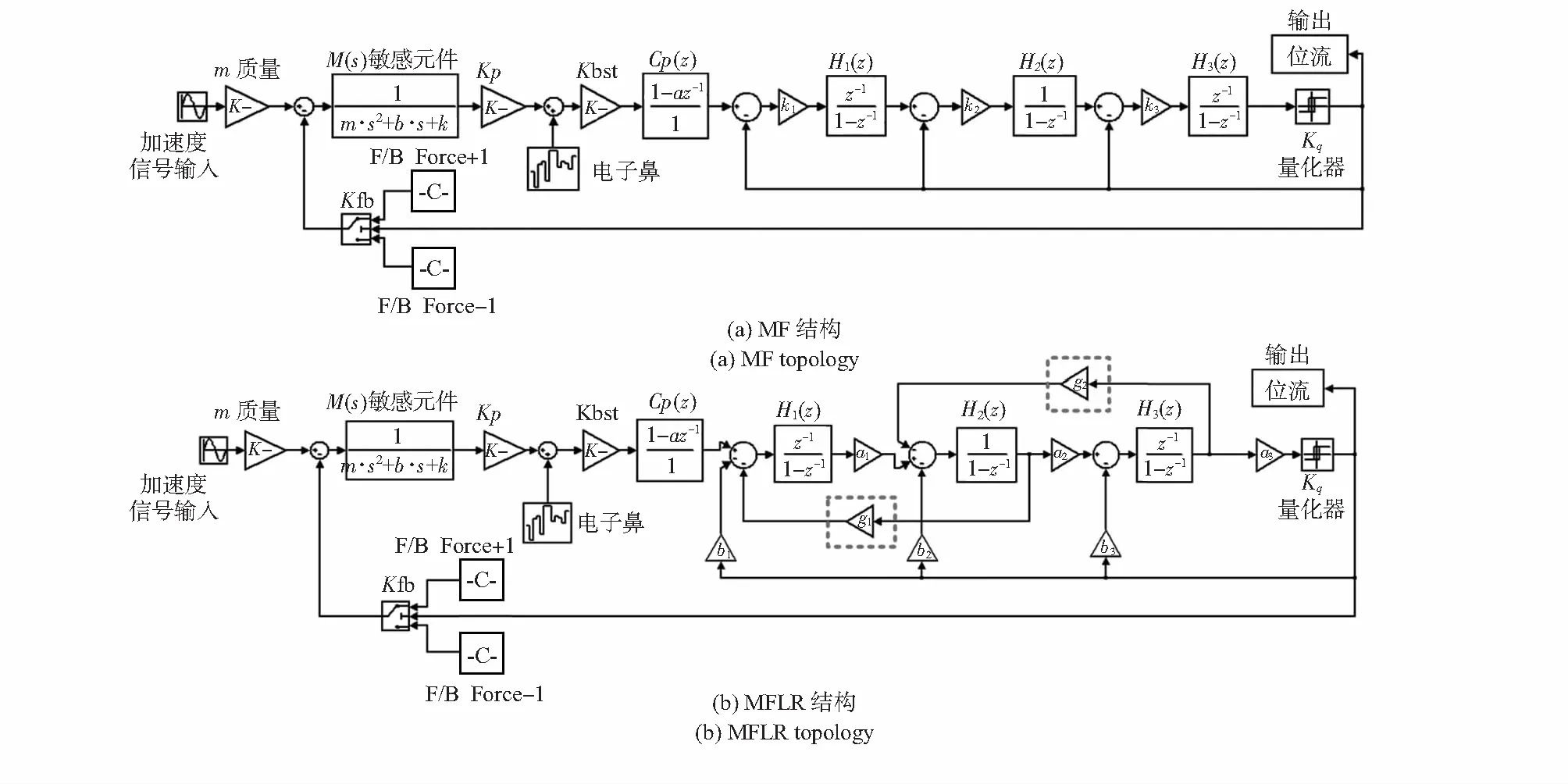
图2 微机械加速度计的五阶Σ-ΔM闭环控制系统Matlab/Simulink模型Fig 2 Matlab/Simulink model for fifth-order closed-loop control system of MEMS accelerometer based on Σ-ΔM
根据经典的线性控制系统理论[11],图2(b)中微机械加速度五阶MFLRΣ-ΔM闭环控制系统的信号传递函数(STF),电噪声传递函数(ENTF)和量化噪声传递函数(QNTF)推导如下
(1)
(2)

(3)
其中
km(z)=Cp(z)KfbKpoKbstKqM(z),



(4)
式中M(s)为微机械加速度计的连续域传递函数,m为微机械加速度计敏感质量块质量,b为阻尼系数,k为弹性梁的弹性系数。
根据式(1)~式(3)得到五阶MFLR结构系统的STF,ENTF和QNTF的波特图如图3(b),而图3(a)是微机械加速度计的五阶MF结构Σ-ΔM闭环控制系统的波特图。
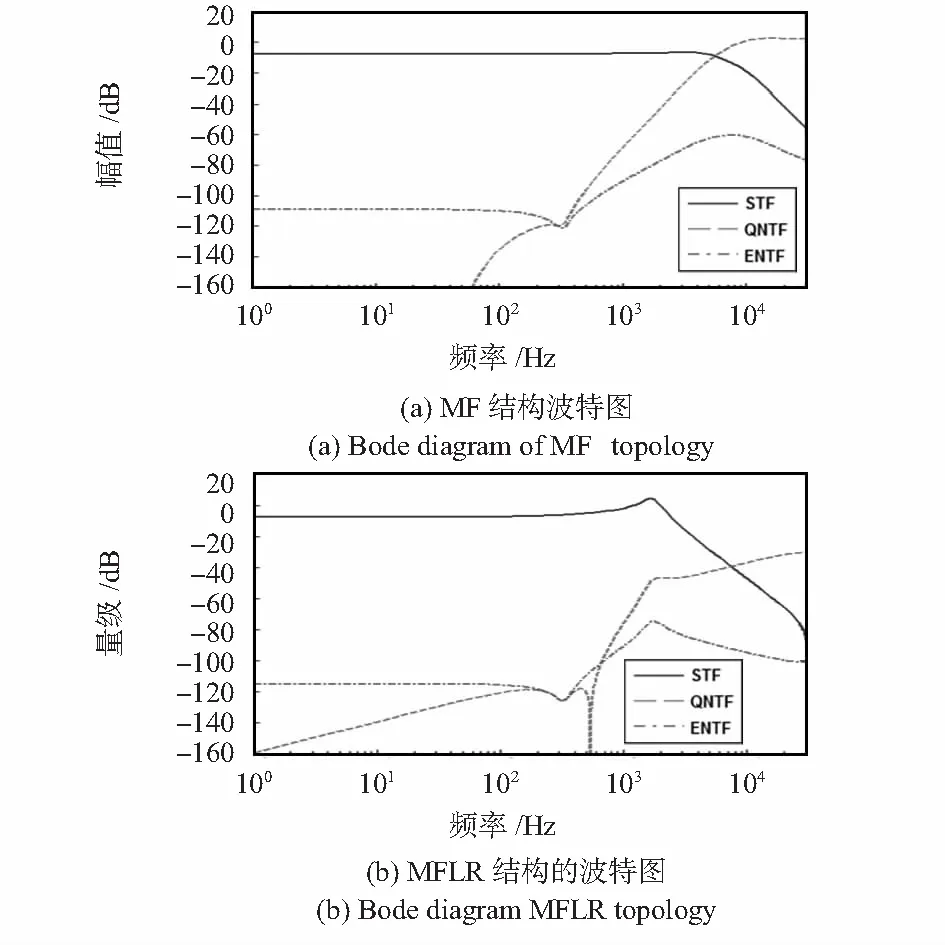
图3 微机械加速度计的五阶Σ-ΔM闭环控制系统波特图Fig 3 Bode diagram of fifth-order closed-loop control system of MEMS accelerometer based on Σ-ΔM
如图所示,图4(a)和图4(b)中均存在一个波谷ωao1,波谷ωao1的中心频率对应于微机械加速度计二阶环节的谐振频率

(5)
但是如图4(a)中所示MF结构系统在波谷ωao1中心频率之后量化噪声量级以100 dB/dec的速率迅速增大,因而,系统应用具有较大的限制性。而如图4(b)中所示MFLR结构系统由于存在局部谐振环节g1和g2,这使得其QNTF的波特图上存在第二个波谷ωao2,其中心频率为

(6)
其中,a1,a2为积分器增益;ω1,ω2和ω3分别是H1(z),H2(z),H3(z)的单位增益频率,波谷ωao2的存在进一步压低了波谷ωao1到信号带宽(500 Hz)之间量化噪声的水平,从而降低了电路的总体噪声。
当输入幅值1gn、频率128 Hz的加速度信号时,微机械加速度计的五阶MF结构和五阶MFLR结构 Σ-ΔM闭环控制系统输出的脉宽密度调制信号的功率谱密度(PSD)分别如图4(a),(b)所示,其中有效信号带宽范围是500 Hz,采样频率为64 kHz,过采样率OSR=64。
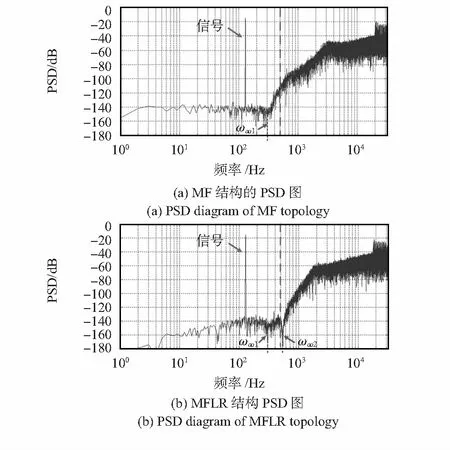
图4 微机械加速度计的五阶闭环控制系统PSD图Fig 4 PSD of fifth-order closed-loop control system of MEMS accelerometer
图4显示在波谷ωao1之前的频率范围内两系统噪声抑制能力相同,均为-140 dB;但图4(a)中所示MF结构系统在ωao1之后噪声急剧上升,而图4(b)中所示MFLR结构系统由于波谷ωao2的存在使得在500 Hz范围内噪声得到了进一步的抑制,五阶MFLR结构Σ-ΔM闭环控制系统的噪声相对于五阶MF结构系统降低了7.9 dB。
2 系统实现与测试
微机械加速度计五阶MFLR结构Σ-ΔM闭环控制系统电路实物如图5所示,为了降低信号走线对性能的影响,PCB电路板总共有4层,包括顶端器件层、底端器件层、中间电源层、中间地层,其中地层被分为模拟地和数字地,整个电路板的大小为80 mm×45 mm,采用±9 V 供电。

图5 微机械加速度计的五阶MFLR结构Σ-ΔM闭环控制系统电路图Fig 5 PCB prototype of fifth-order closed-loop control system of MEMS accelerometer based on with MFLR structure Σ-ΔM
为了完全消除反馈电极与检测电极之间的串扰,采用空间复用的反馈控制机制,系统的一个完整控制周期包括两个部分:检测工作周期(sensing cycle)和力反馈工作周期(feedback cycle)。检测工作周期:反馈电极接地,前置电荷放大器开始工作,将感应的电荷转换为电压,经过后续电路处理和采样量化,得到数字输出(bitstream)。力反馈工作周期:反馈控制开关启动,由数字输出信号判断反馈电压加载在正反馈电极上还是负反馈电极上,以使质量块保持在平衡位置。图6中所示反馈控制开关S1,S2,S3,S4由可编程逻辑控制芯片(CPLD)EPM3032A控制,主时钟(MainCLK)为2MHz,MainCLK经过内部分频输出62 kHz的采样时钟(sampleCLK)信号。反馈控制开关S1,S2,S3,S4的工作时序如图7所示,输出的脉宽密度调制数字信号(bitstream)如图8所示,验证了系统的功能性。
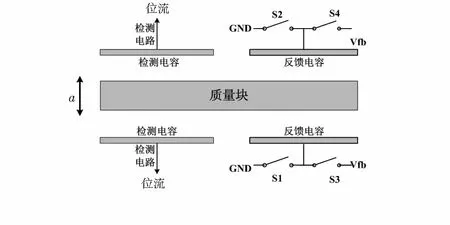
图6 反馈控制开关示意图Fig 6 Schematic diagram of feedback control switches
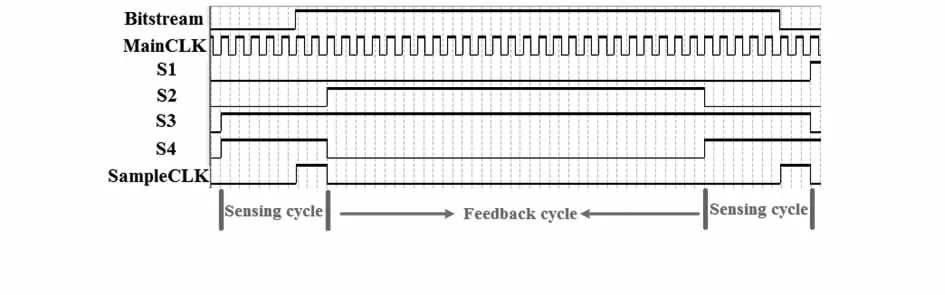
图7 反馈控制时序图Fig 7 Timing diagram of feedback control
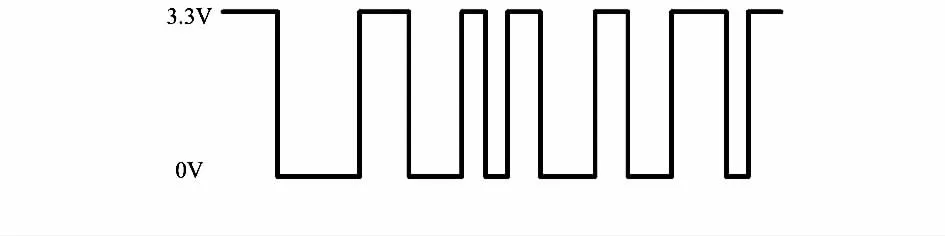
图8 微机械加速度计的五阶MFLR结构Σ-ΔM闭环控制系统输出数字信号Fig 8 Output digital signal of fifth-order closed-loop control system of MEMS accelerometer with MFLR structure based on Σ-ΔM
3 结 论
本文设计并实现了一种微机械加速度计五阶MFLR结构Σ-ΔM闭环控制系统,与以往常用的五阶MF结构Σ-ΔM闭环控制系统相比,MFLR结构微机械加速度计Σ-ΔM系统能够有效地进一步抑制信号带宽内的噪声,信号带宽内噪声水平降低了7.9 dB,最后在PCB电路上进行了系统功能性验证。
[1] Liu C H,Kenny T W.A high-precision wide-bandwidth micromachined tunneling accelerometer[J].J of Microelectromechanical Systems,2001,10(3):425-433.
[2] Cooper E B,Post E R,Griffith S,et al.High-resolution michromachined interferometric accelerometer[J].Applied Physics Le-tters,2000,76(22):3316-3318.
[3] Kajita T,Moon U K,Temes G C.A two-chip interface for a MEMS accelerometer[J].IEEE Transaction on Instrumentation and Measurement,2002,51(4):853-858.
[4] Aaltonen,Halonen K.Continuous-time interface for a microma-chined capacitive accelerometer with NEA of 4 μg and bandwidth of 300 Hz[J].Sensors and Actuators,2009,154:46-56.
[5] Seeger J I,Jiang X,Kraft M,et al.Sense finger dynamics in a force-feedback gyroscope [C]∥IEEE Solid State Sensor and Actuator Workshop,Hilton Head Island,2000:9-29.
[6] Henrion W,Disanza L,Terry I M.Wide dynamic range direct di-gital accelerometer[C]∥IEEE Solid State Sensor and Actuator Workshop,Hilton Head Island,1990:153-157.
[7] Smith T,Nys O,Chevroulet M,et al.A 15b electromechanical sigma-delta converter for acceleration measurements[C]∥IEEE 1994 International Solid-State Circuits Conference,San Francisco,1994:160-161.
[8] Amini B V,Abdolvand R,Ayazi F.A 4.5mW closed-loop Σ-Δ micro-gravity CMOS SOI accelerometer[J].IEEE J of Solid-State Circuits,2006,41(12):2983-2991.
[10] Engelen J V,Plasschie R J D.Bandpass Sigma-Delta modulators:Stability analysis,performance and design aspects[M].Kluwer Academic Publishers,1999.
[11] Franklin G,Powell J,Naeini A E.Feedback control of dynamic systems[M].Upper Saddle River,NJ:Prentice Hall,2005.
Fifth-order MFLR digital closed-loop control system of MEMS accelerometer based on
DU Song-jie, YUAN Wei-zheng, CHEN Fang, CHANG Hong-long
(Key Laboratory of Micro/Nano Systems for Aerospace of Ministry of Education,Northwestern Polytechnical University,Xi’an 710072,China)
In order to further depress noise in signal bandwidth, a fifth-order MEMS accelerometer closed-loop control system based on Sigma-Delta modulator(Σ-ΔM)with multi-feedback loops and resonators(MFLR)is proposed,this system through adding additional local feedback to shape the quantization noise structure of MEMS accelerometer is fully differential structure which is manufactured on SOI wafer with structure layer thickness of 60 μm and substrate layer thickness of 400 μm,manufacturing procedure includes lithography,sputtering,deep reactive ion etching,etc.Matlab/Simulink model of overall closed-loop control system is firstly set up,then,system parameters are set by unit circle analysis method.System simulation show that power spectral density(PSD)simulation of the system is derived.The amplitude of input is 1 g,and frequency of signal is 128 Hz,noise is -136.2 dB which is 7.9 dB lower than traditional 5 th-order closed-loop control system based on Σ-ΔM with MF topology, at range signal bandwidth of 0~500 Hz.A four-layer printed circuit board(PCB)prototype of this system is built to validate functionality of the system and tested.
MEMS accelerometer; Sigma-Delta modulator(Σ-ΔM);closed-loop control;noise in high frequency
10.13873/J.1000—9787(2014)12—0120—04
2014—03—22
国家自然科学基金资助项目(61273052)
TH 703; TP 391
A
1000—9787(2014)12—0120—04
杜松杰(1988-),男,河南郑州人,硕士研究生,主要从事微惯性传感器信号测量与处理方面的研究。