某型舰载惯导平台安装与对准精度控制
2014-07-18辉王鹏飞陆林生
陈 辉王鹏飞陆林生
(1.海军驻沪东中华造船(集团)有限公司军事代表室 上海200129;2.沪东中华造船(集团)有限公司 上海200129)
某型舰载惯导平台安装与对准精度控制
陈 辉1王鹏飞1陆林生2
(1.海军驻沪东中华造船(集团)有限公司军事代表室 上海200129;2.沪东中华造船(集团)有限公司 上海200129)
舰载惯性系统的精度与船台(坞)的安装与对准密切相关。传统的激光经纬仪采用惯性平台基座零方位刻线与舰船首尾线重合的安装标校方法,但其精度较难满足惯性平台航向的对准要求。文中给出一种基于电子陀螺经纬仪、差分水准仪和方位基准镜进行惯性平台安装与对准的有效控制精度方法,并在后期的实船应用中取得了良好效果。
舰载惯性平台;安装;对准
引 言
舰船惯性导航系统是利用惯性器件(陀螺仪、加速度计)、角度传感器、基准方向及初始位置来确定舰艇的首向、位置和速度的自主式位置推算系统,其惯性导航设备(包括平台罗经、局部基准等)上舰安装与对准具有极高的航向和水平精度要求,并直接影响武器系统命中精度。[1-2]利用传统的激光经纬仪进行惯性平台基座零方位刻线与舰船首尾线重合的安装标校方法,其精度一般控制在3′以内,难以满足惯性平台航向对准要求。舰船系泊与航行试验中通过采用太阳方位法、叠标法等检查惯性导航系统航向精度又存在检测精度偏低问题。[3-4]尤其是舰船使用过程中出现的船体随机变形的量级可达几个角分或者十几个角分,且变化没有规律性,对惯性导航系统精度也具有重大影响。[5-6]
某型舰载惯性导航系统由惯性平台、平台减震器、系统电子机柜以及电源箱组成,其中惯性平台主要由台体、横摇常平架、纵摇常平架等组成,在台体上装有单自由度液浮摆式加速度计。设备出厂时提供平台坐标系轴线方向基准和水平基准,通过调整机构可使惯性平台底座水平方向调整约为±0.5°,方位调整约为±1°。按照相关技术要求,惯性平台上船安装与对准要求首尾线对准精度控制在±30″内,水平精度在±1′内,并可对船体局部变形进行检测。本文给出一种基于电子陀螺经纬仪、差分水准仪和方位基准镜进行惯性平台安装和对准的精度控制方法。
1 安装与对准设计要求
1.1 对准原理
舰载惯性平台安装与对准是惯性导航系统、测量设备与舰船的方位、水平零位基座间相互一致的过程。针对惯性平台首尾基准精度对准要求高的特点,利用电子陀螺经纬仪作为精密定向设备,在没有大地测量点的情况下可以快速测量被测目标的方位角。由于电子陀螺经纬仪的测量精度可达到角秒级,可用于确定主隔壁安装的方位基准镜以及惯性平台上内部方位瞄准棱镜相对于真北向的精确方位角。
电子陀螺经纬仪采用吊丝悬吊且重心下移的陀螺灵敏部来敏感地球自转角速度水平分量,在重力的作用下,产生一个向北推进的力矩,使陀螺仪主轴围绕地球子午面往复摆动,通过光电传感器将陀螺灵敏部往复摆动的光信号转换为电信号,并由控制器计算出与真北方向的夹角值,通过将测得的真北方位角送入电子经纬仪,瞄准被测目标,即可快速、高精度地读出目标方位角。图1为该标校设备的简要结构原理图。
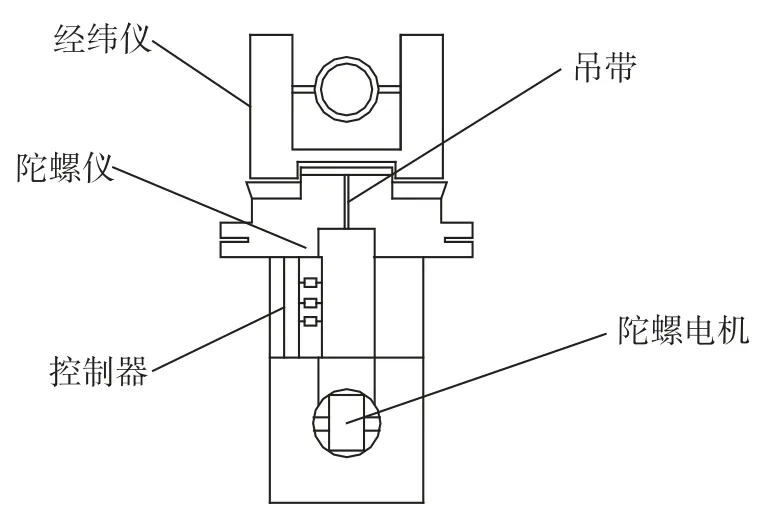
图1 陀螺经纬仪结构原理图
因此在惯性平台对准设计时,可利用电子陀螺经纬仪测定惯性平台上瞄准棱镜和主隔壁上方位镜的精确方位角,再通过差分水平仪调整惯性平台的水平基准水平度的方法,实现惯导平台的安装与对准,其对准设计方案如图2所示。
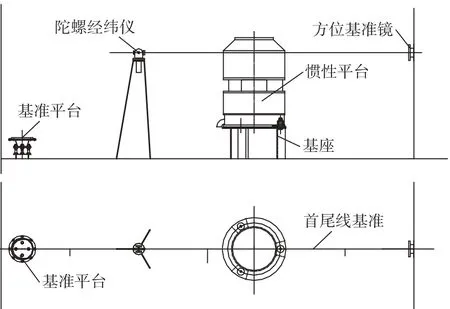
图2 惯性平台安装与对准示意图
对准设计时应确保:
(1)首尾线基准、主基准面及陀螺经纬仪应处在船中线面内或平行于中线面的同一平面内;
(2)应保证陀螺经纬仪具有较广视界,能看到对准设备、舱室内的舰船首尾基准等。
1.2 首尾线基准
按照舰船全船中心线勘划要求,将电子陀螺经纬仪确定在舰船中心面内或平行于中线面的平面内,通过调平、粗对准、开机以及粗测、精测等步骤确定舰船甲板全船中心线真北方位角。精测结束后,将新测舰船中心线真北方位角通过通讯接口输入电子经纬仪,此时电子陀螺经纬仪所显示的角度,即全船中心线的方位角,将电子经纬仪转至0°0′00″即是真北方向。
将电子陀螺经纬仪移至惯性平台所在舱室内,利用全船中心线真北方位角,勘划出舱室首尾基准。由于该定向设备精度达到15″/cosφ(1σ),远高于一般经纬仪3′的精度要求。
1.3 主水平基准(检验平台)
在惯导舱室内设置主水平基准(检验平台),利用惯性平台提供的水平基准测定与主水平基准的水平度偏差,通过调整惯性平台减震器上的调节螺栓,确保惯性平台安装水平精度要求。
主水平基准可采用图3所示方式进行水平调整。通过对主水平基准面现场调整、刮研,用合像水平仪或光学倾斜仪等检测设备测量水平,使主水平基准任意一个方向的水平偏差应不大于40″。
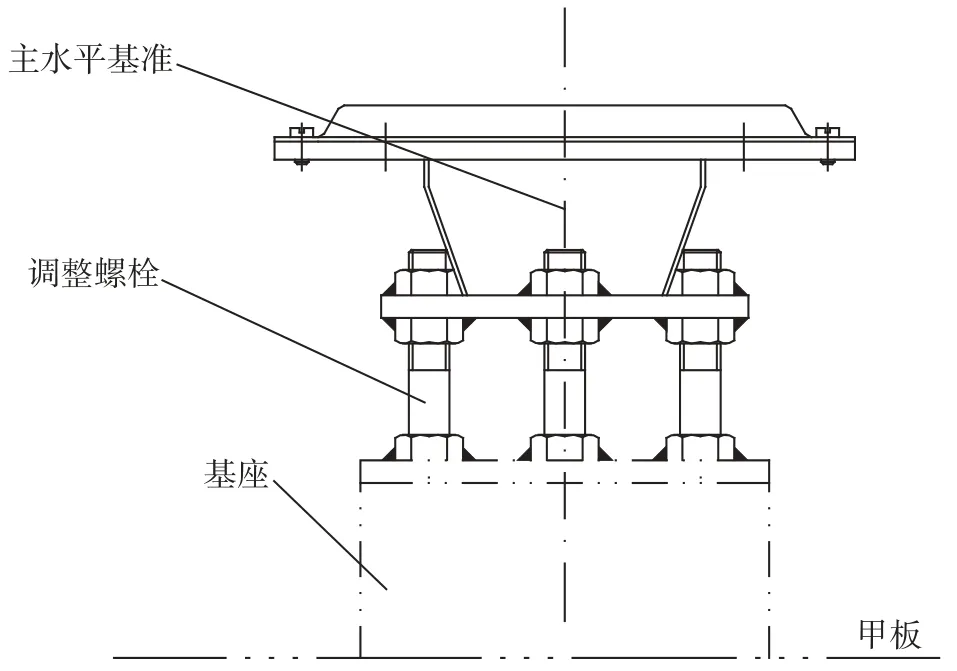
图3 主水平基准安装示意图
在倾斜船台上安装调整主水平基准时,还应严格按船首尾线方向和规定的船台倾斜度安装进行测量与调整。主水平基准安装部位应具有较好的结构刚度和稳定性,必要时应进行结构局部加强。
1.4 方位基准镜
方位基准镜测量原理是从电子陀螺经纬仪的物镜焦点处发出的光束平行投射到方位基准平面反射镜上,该反射光束反射回电子陀螺经纬仪望远物镜,在光学接收器件表面成像,如果平面反射镜安装存在倾斜角α,则其反射光以2α发射回来,则望远镜物镜观测点位移L=f×tan2α。其中f为物镜焦距,α为反射倾角。通过精确测定像点L值,即可求得方位基准镜的倾斜角。
在惯导舱室主隔壁上设置方位基准镜,用电子陀螺经纬仪引入惯导舱室舰船首尾线基准,再转引至方位基准镜,即调整像点L值为零,使方位基准镜法线代表舰船首尾线。通过安装好的方位基准镜作为惯性平台安装与对准的首尾线基准,确保高精度安装要求。同时,利用方位基准镜也可对船体变形测量提供依据。
方位基准镜安装部位结构应具有足够的强度和刚度,高度应与惯导平台自带的水平方位镜的高度相一致,便于光路检测。
2 安装与对准条件
2.1 环境要求
对准前惯导舱室附近区域的焊接,火工矫正等工作应结束,要求船体基线挠曲度、气温等相对稳定,并尽可能避免在日光曝晒下进行,对影响对准工作的机械运转和施工应该停止。
2.2 测试设备要求
对选定的对准测试设备的精度应满足惯导平台对准技术要求,对准测试设备应按规定校正合格并附有检验证书。本文采用的主要测试设备的主要技术参数为:
(1)电子陀螺经纬仪
定向精度 15″/cosφ(1σ)
定向时间 ≤10 min
工作温度 -20℃~ +50℃
工作纬度 >0°S ~70°N
(2)CBDSP-1差分式水平仪
最小分辨率 0.001°
最大量程 ±4.5°
最大误差 ±0.01°
工作温度 -10℃~ +40℃
3 安装与对准方法
利用舱内已经勘划好的首尾基准线,通过陀螺经纬仪测得首尾线基准真北方位角进行方位基准镜的安装和对准,方位基准镜的安装中心高度应与惯性平台内部提供的可代表其首尾方向的光学基准镜等高,通过利用电子陀螺经纬仪照准方位基准镜,测定其反射光线中“十字”光标与物镜中“十字”丝线的重合度,通过逐步调整从而达到高精度的光学基准镜对准,使惯性平台与舰船首尾线安装与对准优于±30″的高精度要求。
3.1 方位基准镜安装与调整
方位基准镜通过法兰安装在舱壁上,法兰盘与方位基准镜支架连接如图4所示。法兰盘焊接在舱壁后,其平面与船首尾向俯仰角和方位角均应在1°以内。
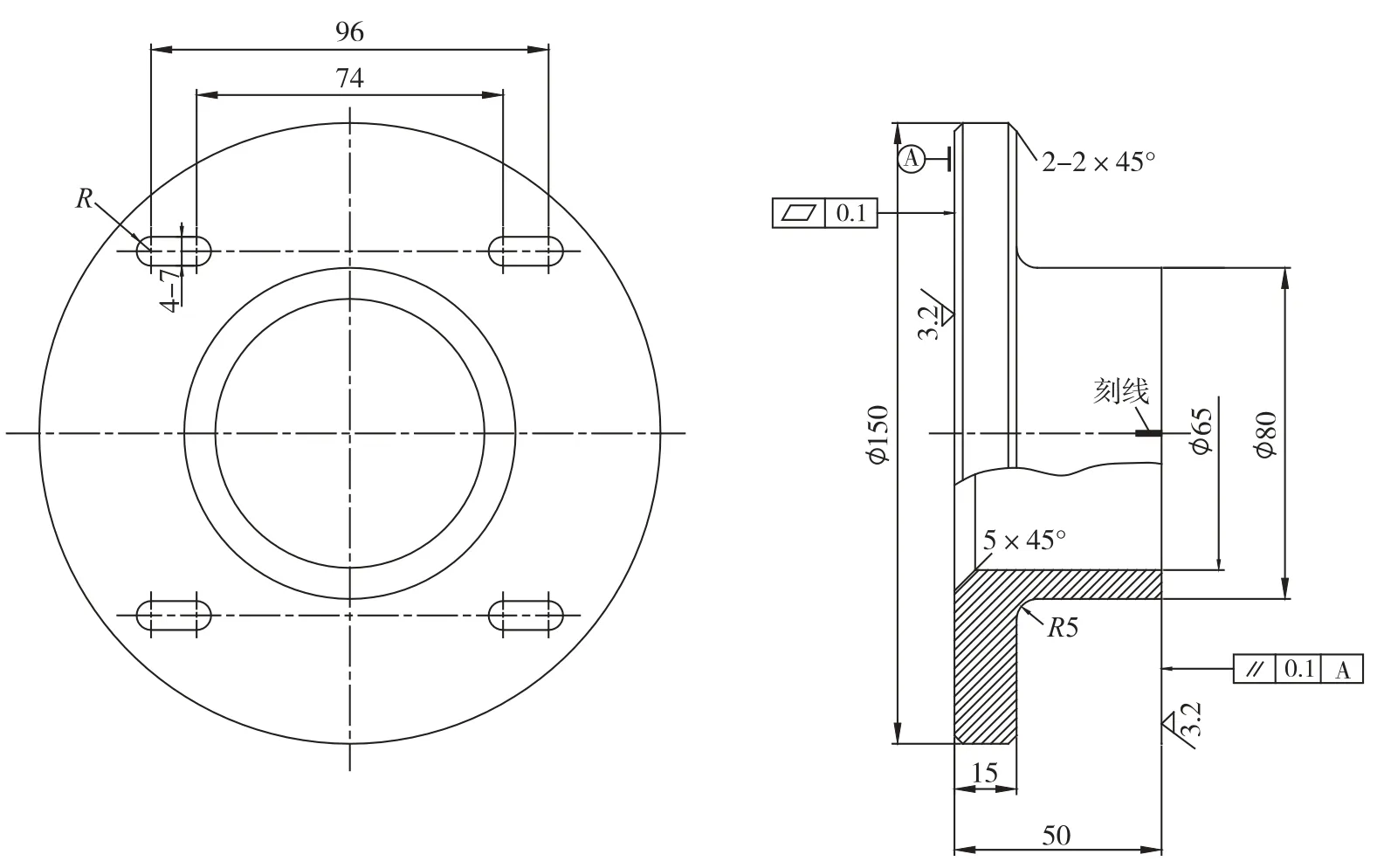
图4 法兰盘外形安装示意图
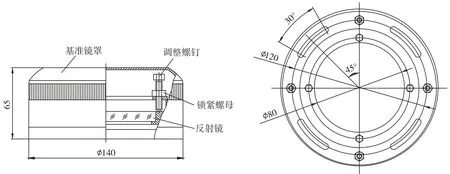
图5 方位基准镜安装示意图
方位基准镜底座上设有4个呈30°分布、宽为7 mm的腰形槽,均布在120 mm圆周上,安装方位基准镜时可用4个M6六角螺栓与法兰固定,其长度可根据安装基座的厚度而定(基准镜底座厚度约为26 mm)。通过自准直经纬仪将引入惯导舱室的首尾线基准转引至方位基准镜方向,用调整螺栓将反射镜法线对准经纬仪的“十字”丝线中,即可锁紧螺栓,然后用硅胶封装调整螺栓以确保基准法线的稳定。
3.2 惯性平台安装
将惯性平台放置在基座上,依据平台减震器底部零方位刻线初步确定舰船首尾线方向。打开惯性平台上罩,通过自准直经纬仪,利用惯性平台上提供的内部瞄准方位镜及舱壁上已安装调整的方位基准镜进行舰船首尾线基准精确对准。
在舰船首尾线对准后利用惯性平台提供的水平基准以及舱室主水平基准面进行水平调整,沿同一方向正反两次分别将差分水平仪安放在检测主基准面和惯性平台被测面,所测倾斜角值取均值。
在舰船首尾基准线、水平基准对准后,利用划线工具,确定惯性平台基座垫块连接螺栓的位置,移去惯性平台设备进行现场配钻。在惯性平台与基座固定后,应按上述步骤复核首尾方位安装精度和水平安装精度。
3.3 静态调整
惯性平台安装与对准合格后,应利用舰船在船台(坞)内对惯性导航系统进行恢复和通电试验,测量出纵向、横向零位偏差,通过修正相应的平台姿态角输出传感器电气零位,实现水平及方位的静态对准。
4 结 论
舰载惯性系统精度不仅与系统元器件性能以及船台(坞)的安装与对准有关,还与舰船使用中船体结构的随机变形量密切相关。[7]因此,在舰船船体设计中应确保舰船在不同排水量状态以及海况下船体结构具有足够的强度和刚度,抑制、消除船体变形对惯性导航系统的影响已显得尤为重要。本文采用上述方法不仅可以较好完成该型舰载惯性平台设备的安装与对准,而且可以通过光学基准镜检测舰船使用中船体局部随机变形对惯性导航设备的精度影响,在实船应用中取得良好效果。
[1]郑梓祯,蔡迎波.舰艇导航系统试验与鉴定[M].北京:国防工业出版社,2005.
[2]朱道宗,范邹.数字方位仪设计与实现[J].舰船电子工程,2011(11):166-168.
[3]周金亮,赵岩峰.舰船变形研究[J].舰船电子工程,2010(5):198-200.
[4]陈建国.舰艇自主导航设备特点比较及发展前景[J].船舶,2011(1):44-47.
[5]纪书润.平台罗经交船时航行精度试验方法的研究[J].舰船论证与研究,1998(11):340-349.
[6]孪永年,嵇继浩.舰船导航系统可靠性和使用性问题研究[J].舰船论证与研究,1999(6):324-327.
[7]郭薇,廖林炜.基于MEMS的GPS/SINS舰船组合导航系统设计[J].船舶,2013(1):63-65.
Installation and precise alignment control for a shipborne inertial Platform
CHEN Hui1WANG Peng-fei1LU Lin-sheng2
(1. Naval Military Representative Office Stand in Hudong-Zhonghua Shipbuilding (Group) Co., Ltd., Shanghai 200129, China; 2. Hudong-Zhonghua Shipbuilding (Group) Co., Ltd., Shanghai 200129, China)
The accuracy of shipborne inertial system is closely related to the installation and alignment of a platform. Traditional laser theodolites use the superposition of zero line of the inertial platform base with the bow and stern lines as an installation and calibration method. However, its precision cannot satisty the alignment requirements of the course heading. This paper introduces an e ff ective method of the precision control of the installation and alignment for the inertial platform equipment based on gyro theodolite, di ff erence level-theodolite and azimuth reference mirror, which brings about a good result in the further practical application.
shipborne inertial platform; installation, alignment
U666.12
A
1001-9855(2014)04-0093-05
2014-01-09 ;
2014-02-24
陈 辉(1967-),男,工程师,研究方向:舰船装备总体监造。 王鹏飞(1972-),男,工程师,研究方向:舰船作战系统监造。 陆林生(1964-),男,教授级高级工程师,研究方向:舰船建造。
