嵌入式智能小车的一种设计方案
2014-07-16张春平
张春平
(石家庄职业技术学院 信息工程系,河北 石家庄 050081)
目前,各级各类学校为了进一步调动学生学习的积极性,提高教学质量,均经常组织各种类型的技能大赛,以达到“以赛促学、以赛促教”的目的;同时鼓励学生参加行业以及其他高层次的技能大赛,以检验教学成效.
在电子类技能大赛中,智能小车是大赛组委经常选择的题目.通过它可以考察学生的单片机应用技能,实现单片机与嵌入式CPU、嵌入式CPU与PC机之间的通信.而一般情况下,智能小车的设计相对复杂,只有参赛者间团结协作、知识互补,才能完成设计.本文提出一种智能小车的简单设计方案,希望能为准备参加技能大赛者提供设计思路.
1 嵌入式智能小车结构设计
嵌入式智能小车集单片机应用、传感器应用和嵌入式系统应用于一身,采用嵌入式操作系统并结合无线通信技术,实现嵌入式系统和PC机之间的通信.
本文所设计的嵌入式智能小车的整体结构图如图1所示.在本设计中,上位机采用嵌入式CPU,以充分发挥其高速处理计算能力、图像识别能力及快速处理能力;下位机采用具有良好控制能力的16位单片机.嵌入式CPU与PC机之间通过无线方式通信.嵌入式CPU与单片机之间通过串口进行通信.所设计的嵌入式智能小车具有循迹、避障、测试温度、利用 Wi-Fi无线网络传输图像及温度的功能[1].

图1 嵌入式智能小车整体结构图
2 上位机设计
近几年,由于嵌入式技术发展迅速,所以在开发嵌入式产品时可以有很多选择.例如,核心控制部分可以选择单芯片,也可以选择核心控制板等.由于核心控制板已经集成了常用的接口和功能,学习者容易掌握和理解,开发者使用方便,因此,本文在智能小车的设计中,选择核心控制板作为核心控制部件.芯片采用ARM9架构实现其功能,比如S3C2440[2].上位机的结构图如图2所示.

图2 上位机结构图
3 下位机设计
下位机选择16位单片机,它主要实现嵌入式智能小车的循迹、测速、避障以及与上位机的串口通信功能.下位机核心控制部分也可以选择核心控制板,比如凌阳公司的SPCE061A(简称61板),同样可简化设计难度.下位机的结构图如图3所示.

图3 下位机结构图
借助转接板实现下位机与上位机的连接,以方便小车的拆装.
转接板可以将单片机中的I/O口进行转接,这样就能充分利用单片机的资源.通常,通过转接板,能将常用接口全部接出,比如,液晶驱动模块接口、GPRS接口、蓝牙接口、金属探测模块接口、循迹传感器模块接口、红外避障模块接口、串行接口等.
本文设计的智能小车将转接板置于下位机与上位机之间,使小车装卸简单、外形美观.
4 智能小车的工作流程
小车设计完成后,可以利用PC机控制智能小车工作.在PC机端,通过点击设计完成的网页来实现对智能小车的操控.
PC机端操控小车工作的具体流程如图4所示.
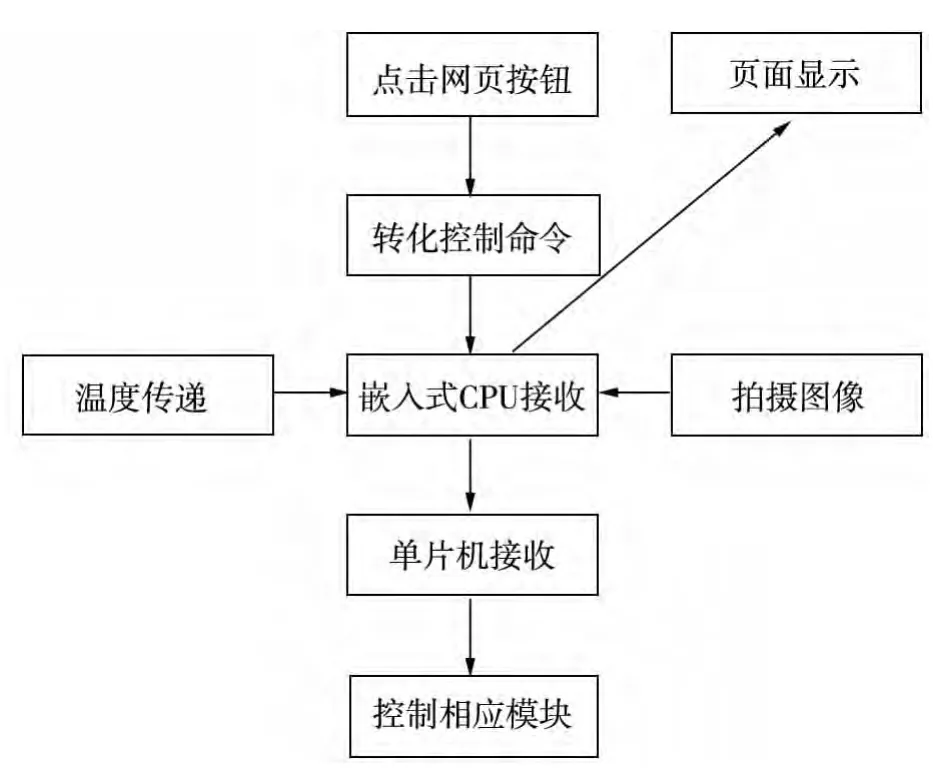
图4 工作流程图
5 结束语
本文介绍了嵌入式智能小车的一种简单设计方案.学习者可以利用单片机学习板和嵌入式学习板进行练习.如果试验成功,则可以利用设计经验完成独立的小车设计.智能产品的设计相对复杂,调试繁琐,需要学习者耐心、认真地完成.希望本文提供的设计方案能成为学习者的参考.
[1]凌阳科技.嵌入式智能小车说明书 [Z].北京:凌阳科技有限公司,2012:4-11.
[2]凌阳科技.ARM9试验箱——Linux平台篇 [M].北京:凌阳科技有限公司,2012:325-343.
