预防Ⅱ型PIO的作动器设计
2014-07-13拜斌
拜 斌
(海军装备部,陕西 西安 710089)
引言
在工程实际中,大多飞行控制系统在伺服控制(尤其是舵回路控制)中存在速率限制 ,当伺服控制需求的舵面操控指令超过伺服作动器的液压或机械许可范围时,就会出现作动器速率或位置饱和,有可能会引起PIO,其本质为非线性影响使人—机闭环控制系统的稳定性削弱。航空界中一般将因作动器速率限制导致的驾驶员诱发振荡定义为Ⅱ型PIO[1],典型事例曾出现在C-17飞机和YF-22飞机上[2]。因此,评估闭环系统是否具有Ⅱ型PIO趋势,设计操纵性能更好的飞机具有重要的意义。
针对Ⅱ型PIO预测问题,国内外展开了大量的研究工作。国外主要从两个方面:①从控制律和作动器本身来考虑,采用提高舵机系统的舵机速率,但需要改变舵机尺寸和重量,因此未能广泛应用[3]; ②运用补偿技术。一是减少驾驶杆命令增益或减少反馈控制增益,但这会恶化飞行品质;二是速率限制被激活时对系统进行相位补偿,设计相位补偿系统有逻辑条件法和连续信号法。而国内目前主要采用相位补偿技术进行抑制,研究较多的是基于逻辑条件法设计的DS补偿器[4]。
文章针对飞控系统中作动器速率限制引起的振荡问题,采用鲁棒稳定性的方法来判断飞机的PIO趋势,通过重新选取合适的作动器参数,避免了不稳定性。
1 问题描述
人工驾驶飞机进行俯仰角控制的原理如图1所示,驾驶员控制目的是使飞机实际俯仰角θ等于期望值θd—跟踪俯仰角指令,图中Kp和N(s)分别表示驾驶员的控制增益、动态特性;作动器回路在正常工作范围内可以近似描述为带宽为1/τ的一阶线性环节,其中非线性环节表示其工作速率受限;δ(s)为作动器输出—舵面偏转角。

图1 俯仰控制人机系统原理方块图(具有速率限制的作动器)
作动器饱和特性如图2所示,其最大输入幅值umax,最大输出幅值ymax。uT=ymax,表示线性部分斜率为1。因此,当作动器没有饱和时,其增益最大Lmax=1,而当饱和且输入作用幅值最大时,增益最小Lmin=ymax/umax,于是L∈[Lmin,1],上述俯仰控制人机系统原理如图3所示。

图2 作动器回路典型的饱和环节

图3 俯仰控制人机系统原理方块图(线性化作动器)
在分析系统是否存在PIO趋势时,除用L表示非线性因素外,还应考虑驾驶员增益Kp,因为在俯仰角控制、空中受油以及下滑着舰等任务阶段,需要驾驶员实施较大操纵,作动器工作于饱和状态,可能引起PIO[2]。假设N(s)=1,则人—机闭环系统稳定性问题的分析变为Kp与L取值的讨论。
为分析作动器非线性影响,要考虑两种情况:时不变参数L和时变参数L。首先假设L线性时不变,目的是在Kp-L平面内确定一个区域,使得图1构型的闭环动态矩阵为赫尔维茨阵,此方法“弱”,不能确保闭环系统的鲁棒稳定性。第二种方法假设参数L∈[Lmin,1]为时变函数,称作“鲁棒”的方法,通过二次型稳定性来判断系统是否存在PIO趋势,在某种程度上相对保守和严格,但能确保闭环系统的鲁棒稳定性。
2 模型建立
2.1 时不变参数系统PIO预测的鲁棒稳定性分析
假设如图3所示,人在回路的俯仰控制中,驾驶员控制增益在可接受范围内(K∈[0,KPmax]),且作动器未饱和(L=1,参数时不变),系统处于闭环稳定状态,ACL(Kp,L)为其闭环系统状态矩阵,与Kp和L呈仿射型关系。在Kp-L平面中,Zarea、ZH分别表示驾驶操纵域和系统赫尔维茨稳定域,为:
Zarea=[Lmin,1]×[0,KPmax]
(1)
ZH={(L,KP):ACL(L,KP)是赫尔维茨阵}
(2)
条件1:当ZH⊇Zarea时,系统不存在PIO趋势,且是“弱稳定”的。
由于时不变参数系统的稳定性分析方法不能直接用于分析时变参数系统的稳定性[3],因此条件1只能进行保守估计,不能完全保证系统全局稳定性。
当参数变化时,只检查赫尔维茨稳定域如图4所示;曲线1满足“弱稳定”要求,曲线2中,ZH与Zarea的交点与闭环系统的一对纯虚极点一致,系统频率与系统描述函数获得的极限环频率一致[5],系统不稳定,具有明显的PIO趋势。

图4 Ⅱ型PIO趋势的条件示意图
而稳定域ZH的确定采用ROBAN算法(该算法可用于分析不确定的LTI系统的鲁棒稳定性问题[6])在稳定域∏中找到符合要求的稳定域∏S,进而确定ZH的范围。算法如下:

不确定动态系统用多项式方程组表示为:
La(∏)={p(·,a(π))|π∈∏}
(3)
其中:p(s,a)=sn+a1sn-1+an,s∈C。

定义2:所有的π∈∏组成的稳定域S位于参数空间∏内,譬如La(S)为赫尔维茨多项式。
稳定域∏S的边界位置的确定:
(1)将不确定的参数空间看作∏是稳定矩形区域;
(2)将矩形域的三个空列表从L1到L3初始化,令i1=0;
(3)将∏放进L1中,令il=1;
(4)测试L1的矩形域∏i1[6];
(5)如果4满足,则将∏i1放进L1;
如果∏i1的半径大于定义的阈值,则将∏i1沿边界把2P矩形分成相同的部分代入L2;
(6)设i1=i1+1;
(7)如果出现∏i1,则回到第4步;如果L2为空,则跳到第8步;
否则清空L1,令i1=1;将L2代入列表L1之后,清空L2;回到第4步;
(8)在L3中的每个矩形域∏i的中心位置检查多项式La(πci)的稳定性,通过稳定的La(πci)的∏i集可以确定稳定域∏S。
2.2 时变参数系统PIO预测的鲁棒稳定性分析
与时不变参数不同,当L为时变参数时,需找到最优的解来评价飞机是否具有PIO趋势。非线性单元的输入与输出关系可以表示为:
L(t):=y(t)/u(t)
(4)
其L(t)∈[Lmin,1]中函数L(·)可以写成:
{L(·):[0,∞)→R|L(t)∈[Lmin,1]}
(5)
对于上述L(·),线性系统的渐进稳定性等价于非线性系统的全局渐进稳定性[7]。
(1)不确定时变参数系统的鲁棒稳定性分析
不确定系统的状态方程表示为:

(6)
其中{π(·):[0,∞)→∏}⊂RP表示一个p维的时变向量,假设A为仿射的;πi,i=1,…,2p表示∏的边界,令V(x)=xTPx为二次型Lyapunov方程。
对于所有的参数π(·),若满足AT(π)P+PA(π)<0,∀π∈∏;则是二次型V(x)是稳定的[8],不等式可写成:
AT(πi)P+PA(πi)<0,i=1,…,2P
(7)
式(7)为线性矩阵不等式[9],可用matlab LMI 工具箱进行处理,由此解决系统(6)的二次型稳定性问题。
(2)不发生Ⅱ型PIO的“强条件”
如图3所示,闭环系统的状态表达式为:
(8)
假设KP∈[0,Kpmax]为时不变参数,L∈[Lmin,1]为时变参数,KP符合赫尔维茨稳定性要求,L需符合二次型稳定性要求。在KP-L平面定义稳定域ZQS:={(L,KP)}。
条件2:当ZQS⊇Zarea时,系统不会出现PIO。上述条件是相对有效和保守的稳定判据,称为“强条件”。
考虑KP与L,L∈[Lmin,1],KP∈[Kmin,Kmax]两个因素的影响,确定稳定域ZQS的算法如下:

(2)若无P>0,则绘制[Lmin,1]×[0,KPmax]图形,使Lmin=Lmin+△L;否则Kmin=Kmax,Kmax=Kmin+△K,程序结束。
若Lmin<1,则跳到第2步,否则中止程序。
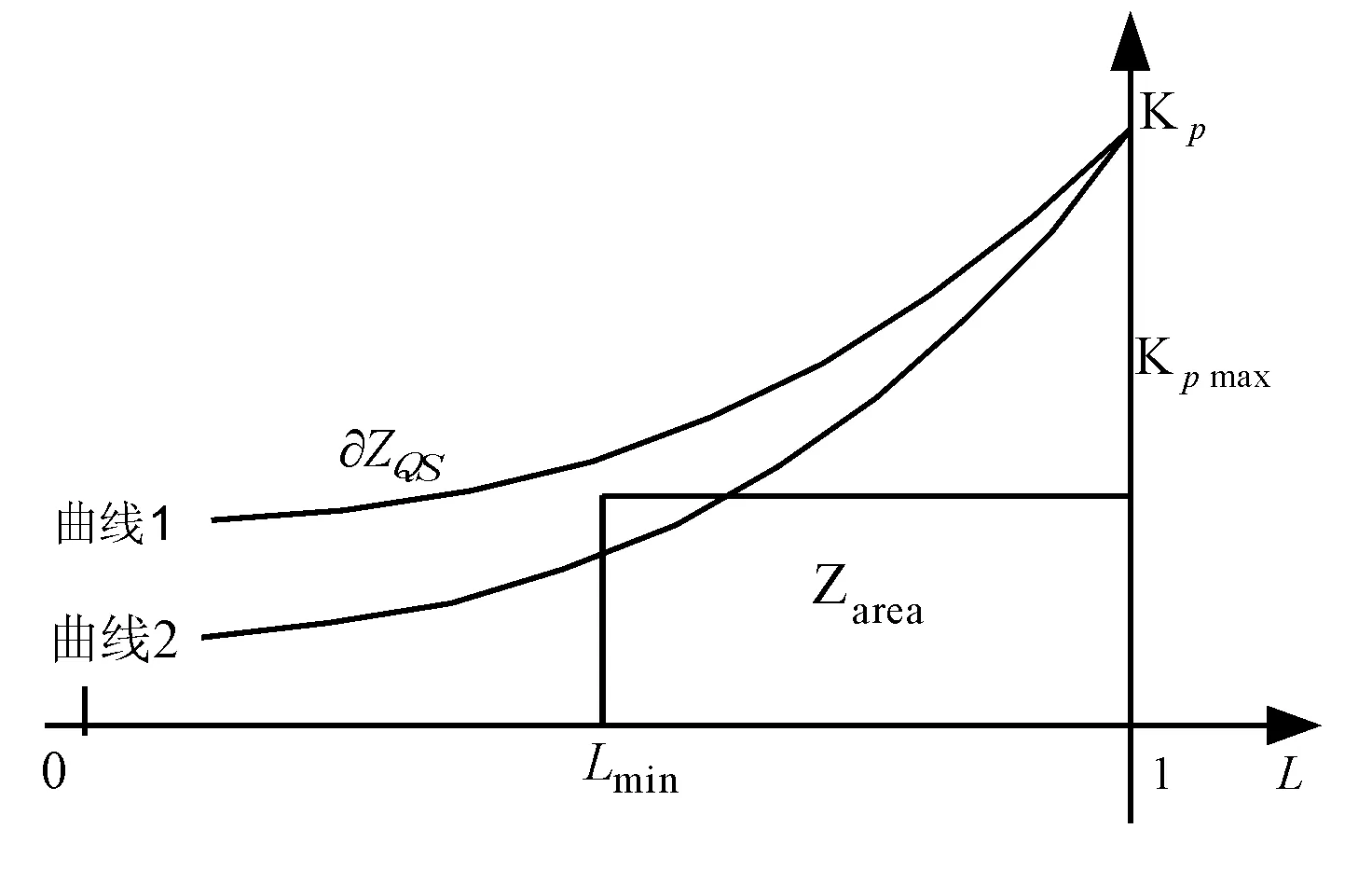
图5 二次型稳定域中(不)产生Ⅱ型PIO具有鲁棒稳定性的“强条件”
如图5所示,在ZQS稳定域中曲线1边界内飞机不会出现PIO;而曲线2不满足要求,飞机有明显的PIO趋势,因而需重新设计作动器,来提高系统抗PIO能力。
3 作动器设计及仿真
3.1 作动器设计
系统二次型稳定性条件比赫尔维茨稳定性要求更为严格,因此稳定域的边界总在边界的上方,如图6所示。

图6 ZH包含操纵域和ZQS边界与操纵域相交示意图
以上分析得到下列三种情况:
(1)ZQS⊇Zarea时(图5曲线1),作动器品质良好,系统不会PIO;
(2)ZQS⊇Zarea和ZH⊇Zarea时(图6),飞机鲁棒性较弱,存在潜在的PIO趋势;
(3)ZH⊇Zarea时(图4曲线2),飞机PIO趋势明显,应重新设计作动器。

图7 重新确定操纵域范围的示意图
算法1如下:
(1)在ZQS和Zarea域中确定(L*,KPmax)的范围(图7);


3.2 算例仿真
具有作动器速率限制的某型飞控系统简化模型如图3所示,其中N(s)=1,τ=0.04s,;飞机短周期动力学模型为:
(9)
当L=1,Kp∈[0,7.1],系统是渐进稳定的,要求的驾驶员增益边界值[10]为2.51(8db)。当Kp>7.1时,线性系统不稳定,由安全性得到KPmax=7.1/2.51=2.82,取KPmax=3,计算得到umax=430,/s,因此Lmin=0.03。由上节算法可以绘制出下图:

图8 某型飞机赫尔维茨稳定域和二次型稳定域

4 结语
本文从线性系统鲁棒稳定性角度,研究了系统是否存在Ⅱ型PIO趋势,从而选取更为合适的作动器参数,改善系统性能。当系统出现PIO现象时,重新设计作动器来保证系统的鲁棒稳定性,仿真验证了方法的合理性。但方法未考虑驾驶员的非线性因素,仅针对速率限制作动器饱和环节。由多非线性因素和多变量耦合引起的PIO有待更深入地研究。
[1] 吕雪涛,吴文海.舰载机着舰下滑过程中的PIO趋势评估与防范[J] .航空计算技术,2011,41(16):37-40.
[2] 高金源,李陆豫,冯亚昌.飞机飞行品质[M].北京:国防工业出版社,2003: 12-24.
[3] Amato F, R Iervolino, S Scala, etc. Analysis of Pilot-in-the-loop Oscillations Due to Position and Rate Saturations[C]//IEEE conference on Decision and Control. Sydney: ECC99 Conference, 2000:5-13.
[4] Scala S.A New Method for Prediction of Pilot In-the-Loop Oscillations (P10) Based on Robust Stability Analysis[R]. Capua :Italian Aerospace Research Centre,1998.
[5] R H Smith. Notes on Lateral-Directional Pilot Inducted Oscillations[R]. WPAFB: Air Force Flight Dynamicis Laboretory, 1982.
[6] F mato, R Iervolino. New criteria for the analysis of PIO based on robust stability methods[J]. AIAA or pulished with permission of author(s) and/or author(s) sponsoring organization, 1999(1):31-40.
[7] Verde L. Controllo Robusto di Aeromobili: Metodi Parametrici per 1'analisi e la sintesi[C]// PhD Thesis. Italian:University of Naples,1992:15-38.
[8] McRuer D. Aviation Safety and Pilot Control[C]//Understanding and Preventing Unfavorable Pilot-Vehicle Interactions. Washington D.C: ASEB national Research Council, 1997:21-39.
[9] 曹启蒙,李颖晖,张煜.反馈结构 RLF 补偿器在抑制型 PIO 中的应用研究[J].飞行力学,2003,29(5):10-13.
[10] 吴蔚,方振平.现代飞机俯仰跟踪时诱发振荡预测分析[J].飞行力学,1998,16(3):45-50.
