某型直升机反潜战术训练系统设计与实现
2014-07-12陈遵银孙明太吴卫玲
陈遵银,孙明太,吴卫玲
(海军航空工程学院青岛校区,山东青岛266041)
某型直升机反潜战术训练系统设计与实现
陈遵银,孙明太,吴卫玲
(海军航空工程学院青岛校区,山东青岛266041)
针对某型直升机反潜训练效率低的问题,提出了基于HLA的某型直升机反潜战术训练系统设计与实现。系统运用反潜作战仿真建模方法,基于HLA对直升机反潜战术课目训练进行仿真,着重从台位设计、体系结构和技术实现等方面进行一定的研究。实践证明,该系统设计合理、运行稳定、模拟效果逼真,能够满足反潜部队战术训练的需要,也为其他反潜机型战术训练系统研制提供一定的借鉴。
航空反潜;战术训练;HLA;系统仿真
航空反潜与其他反潜方式相比,具有速度快、效率高和受潜艇威胁小等特点,多年来海军强国投入了大量人力、物力来提高航空反潜作战能力。因反潜作战效果受多种因素的影响,如海区环境、目标信息、反潜装备和人员素质等的因素,如何依据诸多因素开展扎实有效的反潜训练,是反潜部队所要完成的日常性工作[1-4]。为了提高某型直升机反潜战术训练水平,本文研制开发了一套岸上反潜战术训练系统。
1 反潜战术训练系统总体设计
1.1 系统布局
反潜战术训练系统在配置上强调使用灵活、易于维护,适合部署在作战部队或机关(指挥所)。系统须由导演台、战术指挥长操作台(一领台)和设备操作台(二领台)3种台位组成,通过以太网构成C/S结构系统,如图1所示。导演台是唯一的,一领台和二领台作为操作单元可以根据训练需要进行1~6个机组的配置。系统在运行时,由导演台设置任务,通过参训机组各台位协同配合,能够完成反潜模拟训练等任务。
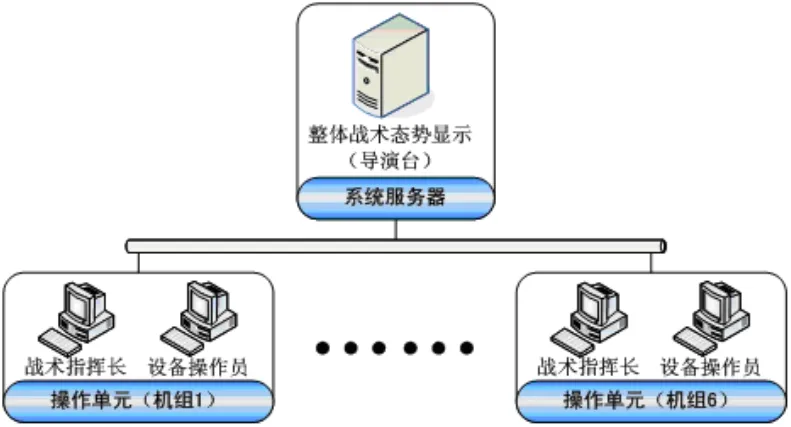
图1 系统配置图Fig.1 System configuration scheme
1.2 系统台位设计
该系统包括导演台、一领台和二领台3种台位。在配置上以机组(分为一领台和二领台)为基本单位,由统一的导演台进行协调和控制,实现反潜过程的模拟。系统台位功能模块组成如图2所示。
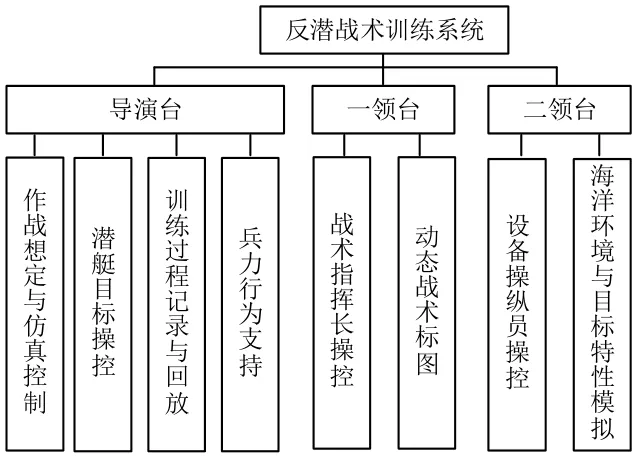
图2 系统台位功能模块组成框图Fig.2 Composition frame of system function modules
1.2.1 导演台
导演台负责完成作战想定与仿真控制,潜艇目标操控,训练过程记录与回放,兵力行为支持的功能。兵力行为支持模块是导演台的重要组成部分,负责进行反潜过程态势的计算与控制。
1)作战想定与仿真控制模块。设定训练海区位置及形状,设定水文条件或调用海洋环境数据库有关数据并发布数据,设定直升机初始位置、携带的搜潜设备和攻潜武器。以电子海图的形式显示反潜作战过程的战术态势,同时显示潜艇目标和直升机的运动情况。显示机组搜攻潜过程以及搜潜和攻潜结果,可根据训练任务的需要,随时启动、暂停、加速或停止反潜训练过程。具体功能包括:情况的图形想定编辑,作战方案的决心编辑,自然环境设定;作战仿真进程控制,监视联邦成员情况,控制仿真进程;自定义,打开、保存想定;情况想定编辑;兵力标注;阵地设计;作战过程态势显示;仿真进程控制;兵力添加、修改,武器装备配置;阵地(空域)设计。
2)潜艇目标操控模块。设定潜艇目标信息(目标特性、航向、航速以及平面运动位置和机动规避方式等),在仿真过程中可随时改变其运动状态。这里以潜艇目标信息中速度和航向为例,研究其仿真模型。
潜艇目标速度的变化规律满足指数函数条件。在加速条件下,速度从v0到vT的变化规律为:

在减速时,速度从v0到vT的变化规律为:

式(1)、(2)中:v0、vT分别为初始速度和目标速度;a、b为增速参数;vt为瞬时速度/(m/s);Kv为减速参数。
潜艇目标航向随时间的变化过程为:

式(3)中:δ为舵角;K、T为动力系数。
仿真中取捷径转向至规定航向HT,因而有当H0〈HT〈H0+180°时,向右转向;否则反之。
t时刻潜艇的二维位置为:

式(4)中:Δt为仿真步长/s;H为现时航向。
3)训练过程记录与回放模块。记录与回放子系统作为反潜战术训练系统的一个重要组成部分,是整个系统的数据汇总中心,以系统联邦成员的形式与系统中其他组成部分协调运行,记录与回放流程如图3所示。

图3 记录与回放子模块流程Fig.3 Flow of register and playback sub-module
记录与回放子系统工作在记录状态时,采用HLA体系结构、向量容器、ADO和Microsoft Office Access Database,结合SQL数据库操作语句实现数据的读取、暂存和存储;回放时,采用SQL数据库操作语句和交互选择对话框,实现数据的实时读取和有选择重现,并可以对数据库进行简单维护。系统可以完成反潜过程中主要操作信息和状态数据的记录、回放和态势展示,并能将训练过程中记录的数据进行筛选和分析,为反潜效果的评估提供科学的依据。
4)兵力行为支持模块。反潜战术训练系统的运行要涉及到诸多兵力行为的支持,这些兵力行为主要靠仿真模型来实现的。主要仿真模型包括海洋水声环境计算和目标仿真,吊放声纳搜潜仿真,声纳浮标搜潜仿真,磁探仪搜潜仿真,攻潜武器仿真等模型。
1.2.2 一领台
一领台由战术指挥长操控,战术指挥长负责空中领航和反潜战术活动,主要完成组织协调机组各成员战术动作,掌握敌我战术态势,熟练运用反潜方法,及时调整反潜方案,使用浮标、标志弹和反潜武器。
1)战术指挥长操控模块。操控多架直升机的飞行状态,包括高度、速度和航向,一个操作台可控制仿真中的任意一架直升机,同一时间只能控制一架;显示所操控直升机的飞行状态,包括高度、速度、航向、武器和装备等,控制所操控直升机的武备投放,模拟雷达显示屏二次信息的显示。
2)动态战术标图模块。一领台提供了动态战术标图功能,用以替代战术指挥长的纸上手工标图,既可以实现快速、准确、规范的标图,又能够方便地进行结果的保存及打印。采用双显示器配置,一个显示设备控制功能面板和机上战术显示器信息;另一个显示动态战术标图的界面。包括依据经纬度标绘图标,如直升机的吊点、潜艇和浮标位置等,并能设定标图时间。控制经纬度范围,包括放大、缩小和拖动绘图区。显示本机位置,并将本机位置设为标图表中心。显示友机信息、操作员姓名、气象信息等;将标图表保存为图片格式(.bmp)。
1.2.3 二领台
二领台由设备操作员操控,设备操作员在反潜飞行中的任务是了解战术指挥长战术方案,负责使用吊放声纳、航空磁探仪和浮标系统搜索、跟踪潜艇[5-6],用于直升机搜潜设备(吊声、浮声、磁探)的搜潜功能、搜潜过程和搜潜战术训练,并为一领台提供目标信息,供战术指挥长进行下一步的战术决策。
1)海洋环境与目标特性模拟模块。采用高斯束射线模型Bellhop来计算声线轨迹及传播损失,较好地处理声线能量焦散和完全影区等问题,并且适用于距离相关条件和复杂三维环境下的声场计算。水声传播模型主要包括射线理论模型、简正波模型、多途路径展开模型、快速场模型和抛物方程模型。吊放声纳由于基阵尺寸限制,属于高频声纳。因此,采用高斯束射线Bellhop模型进行传播损失计算。Porter等人开发的Bellhop模型[7]采用高斯射线近似代替几何射线,能够较好地处理声线能量焦散和完全影区等问题。假设海底平坦,海深为zb,设吊放声纳位置位于(zs,0),声能叠加采用半相干的计算方法,沿声线轨迹S在(z,r)处的声压为:

式(5)、(6)中:U(θ)为与掠射角θ有关的声线振幅的权重函数;N为由声源到达(z,r)处的特征声线的条数;ω为圆频率;z0和c0分别为声源处的深度和声速;pj(r,z)由Bellhop模型计算。
传播损失可表示为:

2)搜潜设备操控模块。吊放声纳的功能模拟,即可模拟吊声水下分机的收放,以及声方位、回声定位、手动跟踪、自动搜索、自动跟踪、半自动跟踪6种工作方式,向战术指挥长子系统传送目标数据等[8-10]。声纳浮标的功能模拟,即模拟声纳浮标的搜索、跟踪、测向等3种工作方式。磁探仪的功能模拟,即可模拟磁探仪设备的收放,磁探仪的使用控制,以及确认发现目标的信息显示等3种功能。在被动声纳中,噪声由潜艇声源发出,传输到反潜机的声纳接收器中。被动声纳方程为

式(8)中:SL为目标声源级/dB;NL为海洋环境噪声级/dB;TL为传播损失/dB;DT为达到50%检测概率的检测阈/dB;SE为信号余量/dB。
如果用被动声纳方程来预测探测概率,则被动声纳方程中的参数都是随机变量,相互独立,且满足正态分布。对一个声纳系统而言,在给定的中心频率上,如果SE大于或等于0,那么从原则上讲就能探测到目标,认为SE等于0时的瞬时探测概率达到50%。因此,单枚被动浮标瞬时探测概率的计算公式为

式(9)中:x为信号余量;σSE为信号余量方差。
2 系统的技术实现
在系统联邦运行中,各联邦成员之间采用交互和对象进行信息传输,协调一致地进行仿真过程推进。一是采用统一的时间推进机制。由于作战仿真中产生的交互事件具有较强的时敏特性,系统具有统一的仿真周期运行和推进,在每个仿真周期,首先由“想定与仿真控制”发出时间推进交互,各联邦成员按照时间推进步长进行一次仿真推进后,发布相应的结果,“想定与仿真控制”在接收到关键成员的时间推进完成后,才可继续下一个周期的仿真。二是集中仿真与分布交互结合的方式。仿真模型集中在“兵力行为支持”联邦成员中运行,充分发挥服务器硬件性能,并有效保障各作战单元时空一致性。而分布式联邦成员又可满足系统使用中所需席位的分布和灵活的应用配置。三是数据打包与统一数据结构结合,提高网络效率。在系统交互类和对象类中,如果不遗余力地将相应信息都以参数和属性表示,则会产生大量的交互参数和对象属性,影响网络传输效率。
2.1 交互类的发布与订购
根据系统需求,定义了13个交互类,各联邦成员通过交互类的发布与订购实现信息的传递。
1)加入联邦(JoinHLA)。各联邦成员在启动后,都要通过该交互类发布,以通知想定与仿真控制联邦成员自己已启动并做好准备。
2)退出联邦(ExitHLA)。各联邦成员在程序结束前,都要通过该交互类发布,以通知想定与仿真控制联邦成员自己已退出联邦。
3)初始化多用途(Init)。Init交互在仿真初始化、仿真运行中,具有多个不同的用途。仿真初始化时,在按照作战想定进行仿真运行前,想定与仿真控制联邦成员通过Init交互类向各联邦成员发布作战想定。仿真运行中,想定与仿真控制联邦成员可通过Init交互对作战单元任务规划实施变更。想定与仿真控制联邦成员可通过该交互进行动态的兵力添加、修改、删除,暂停或结束仿真运行。
4)兵力武器装备性能(WeaponEquipDATA)。在仿真初始化时根据全部作战单元及其武器装备配置的类型型号统计,将其性能数据(包括复杂属性数据)采用参数打包的形式,由想定与仿真控制联邦成员以WeaponEquipDATA交互进行发布。在仿真进行中,当想定与仿真控制联邦成员增加兵力时,如果新增加兵力及其武器装备配置类型型号中有想定出现者,则将其性能数据以WeaponEquipDATA交互进行发布。
5)完成初始化(InitOK)。各联邦成员在接收到仿真初始化交互(Init)并完成仿真初始化后,采用InitOK交互发布自身联邦成员名称,由想定与仿真控制联邦成员定购接收,以确定准备好仿真的各联邦成员。
6)仿真时间推进(Sim ToDateTime)。仿真运行中,由想定与仿真控制联邦成员采用该交互发布仿真时间推进命令,其他各联邦成员定购接收该交互后,按照交互参数中规定的时刻、时间步长(和台风实时状态一致),完成一个仿真周期的时间推进。
7)仿真推进完成(TickOK)。各联邦成员在完成一次周期的仿真后,采用TickOK交互发布自身联邦成员名称,由想定与仿真控制仿真时间推进命令,其他各联邦成员定购接收该交互后,按照交互参数中规定的时刻、时间步长(和台风实时状态一致),完成一个仿真周期的时间推进。
8)作战单元控制命令(RulerControl)。RulerControl是由人在回路兵力操控联邦成员和兵力行为支持中CGF兵力产生的作战单元装备控制级的命令,因而由这2个联邦成员所发布。想定与仿真控制、记录回放与分析、兵力行为支持联邦成员定购接收。
9)新空域(NewAirSpace)。在仿真过程中,兵力可能产生目标可能位置域等新的空域。仿真中新产生的空域采用NewAirSpace交互进行发布和接收。
10)人在回路控制(ManInLoop)。仿真兵力包括计算机生成兵力(CGF)和人在回路战术操控兵力。每个人在回路战术操控联邦成员可根据想定中潜、舰、机相应类型兵力,选择一个或多个兵力单元进行人工战术操控而不用兵力行为支持中的CGF行为仿真(仍然需要其武器装备仿真);同时也可以随时取消所选择的人工战术操控单元。在这种情况下,系统采用ManInLoop交互进行人在回路情况的发布和定购。
11)时间加速倍率请求(SettingNewDeltaT)。在仿真运行中,当指挥所、人在回路战术操控等人在回路联邦成员需要请求改变仿真时间加速倍率(时间步长)时,通过SettingNewDeltaT发送交互。想定与仿真控制联邦成员定购接收,并实施仿真推进控制。
12)一领台向二领台发送信息(TTacToEquip)。仿真中,当一领台向同一个兵力内的二领台发送投放武器命令时,通过TTacToEquip发送交互。
13)二领向一领发送信息(TEquipToTac)。仿真中,当二领台向同一个兵力内的一领台发送吊放声纳已经放下命令,以及发送测量到的目标方位距离(读数)时,通过TEquipToTac发送交互。
2.2 对象类的发布与定购
根据系统需求,定义了1个对象类—AllUnit作战单元状态。在仿真运行中,全部作战单元的武器装备仿真由兵力行为支持执行,产生各作战单元的状态数据,状态数据包括经纬度、高度、速度、航向等基本数据,且包括下一仿真周期所期望的最大时间步长。其他各联邦成员对对象进行定购接收,并作相应处理。
2.3 交互对象类信息传输及其响应的程序实现
在系统仿真运行中,各联邦成员之间通过上述的交互和对象类的时序发布,协调一致地系统的仿真运行推进。在HLA的6类服务基础上,进行了软件封装以利于程序开发,以5个文件(Federate.cgf,HLA-comm.h,HLAcomm.ccp,MySimulator.h,MySimulator. cpp)的形式为各联邦成员提供HLA对象交互发布和定购的开发平台。
2.3.1 交互对象类的发布与定购
采用Federate.cgf文件以文本形式描述本联邦成员所需发布和定购的交互对象类,其格式如下:
[FEDERATION_NAME]
联邦名称
[FEDERATE_NAME]
本邦员名称
[FEDFILE]
Federation.xm l
[RTINAME_REF]
25.137.249.1:2000//RTIIP地址、端口
[OBJECTS]
对象类个数
AllUnit 5//对象类名称,属性个数
UnitNum P/S//对象属性名称,发布/定购
TableLen P/S
Buffer P/S
MaxDT P/S
SimSpanT P/S
……
[INTERACTIONS]
交互类个数
RulerControl P/S 3//交互类名称,发布/定购
参数个数
Num//交互参数名称
CommandList
SimSpanT
Decision P 2//交互类名称,发布,参数个数
UnitNum
DATA
……
2.3.2 加入联邦和退出联邦的实现
在HLAcomm.h和HLAcomm.ccp文件中,定义了加入、退出联邦的程序类。其主要方法包括bool Open()和boolClose()。Open()方法打开Federate.cgf文件,根据文件描述的交互对象类的发布和定购,调用HLA服务函数,创建联邦(如果尚未创建)、获取交互和对象类句柄、发布和定购交互对象类,完成联邦的加入。创建交互对象类变量。Close()方法退出联邦。
2.3.3 交互对象类的发布与定购
程序采用HLAcomm.ccp中创建的交互对象类变量(以公共变量形式),进行交互/对象类参数/属性的设置和发布。
交互类发布通过以下过程实现:
interactionHandle->setPara(string name,void*value,int size);
interactionHandle->send Interaction();
对象类发布通过以下过程实现:
ObjectHandle->setAttri(string name,void*value,int size);
ObjectHandle->updateObject();
在MySimulator.h和MySimulator.cpp程序文件中,采用回调函数方法实现交互对象类的定购获取。其主要函数包括:
Void discoverObject(ObjectClass*pObject);//发现对象
Void reflectAttributeValues(ObjectClass*pObject);//接收到the Object对象的属性更新
Void receiveInteraction(InteractionClass*p Inter);//接收到交互
Void removeObjectInstance(ObjectClass*pObject);//接收到the Object被删除的通知
Void provideA ttributeValueUpdate(ObjectClass *pObject);//接收到更新the Object对象属性的请求
当接收到所定购的交互类时,自动进入函数receiveInteraction(InteractionClass*p Inter),根据pInter指示的交互类名称,采用void*getPara(string Para-Name)获取参数名ParaName所对应的数值地址,获取参数数值。
所获取的交互对象类内容填写到公共变量中,然后向响应处理程序发送消息。在响应处理程序中以消息事件处理方式完成对定购获取信息的响应处理。
3 结束语
该系统使用不受配合目标、飞机状态和海区条件等因素影响,随时组织人员进行反潜训练,丰富了部队反潜训练的形式。系统具备完善的记录与回放功能,可以方便地进行训练后讲评和战术研究,也可为机关评估部队及人员的反潜能力提供一定的依据。通过系统比较全面、真实的反潜训练,可有效加深受训人员对航空反潜复杂性的认识,培养指挥员沉着、冷静、敏锐的战术素养,提升部队的航空反潜能力。
[1] 吴芳,吴铭,杨日杰.反潜机吊放声纳扩展螺旋线形搜潜建模[J].北京航空航天大学学报,2011,37(9):1137-1141. WU FANG,WU MING,YANG RIJIE.Building extended spirality searching model of dipping sonar of anti-submarine airplane[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(9):1137-1141.(in Chinese)
[2] 吴芳,杨日杰,高青伟.主/被动联合多基地航空搜潜建模与仿真[J].北京航空航天大学学报,2010,36(3):319-323. WU FANG,YANG RIJIE,GAO QINGWEI.Building and simulating associated multi station aeronautical search models composed of active and passive sonars[J]. Journal of Beijing University of Aeronautics and Astronautics,2010,36(3):319-323.(in Chinese)
[3] 王承祥,鞠建波,陶晨辰.航空反潜综合模拟训练系统研究与设计[J].系统仿真技术,2012,8(3):201-204. WANG CHENXIANG,JU JIANBO,TAO CHENCHEN. Study and design on colligate training simulation system for air antisubmarine[J].System Simulation Technology,2012,8(3):201-204.(in Chinese)
[4] 田云飞,严建钢.航空反潜网络化体系作战效能[J].火力与指挥控制,2011,36(5):125-128,132. TIAN YUNFEI,YAN JIANGANG.Research on operation effectiveness of air anti-submarine network centric system[J].Fire Control&Command Control,2011,36(5):125-128,132.(in Chinese)
[5] 杨日杰,何友,孙明太.航空搜潜装备搜潜范围建模与仿真研究[J].系统仿真学报,2003,15(11):1547-1549. YANG RIJIE,HE YOU,SUN MINGTAI.Search scope modeling and simulation research for aviation searching submarine equipments[J].Journal of System Simulation,2003,15(11):1547-1549.(in Chinese)
[6] 孙明太.航空反潜战术[M].北京:军事科学出版社,2003:62-78. SUN MINGTAI.Aviation submarine tactics[M].Beijing:Military Science Press,2003:62-78.(in Chinese)
[7]郭新奇,付霖宇,蒋志忠,等.机载声纳浮标作用距离建模与仿真[J].电光与控制,2011,18(8):21-33. GUO XINQI,FU LINYU,JIANG ZHIZHONG,et al. Modeling and simulation for operating range of airborne sonobuoys[J].Electronics Optics&Control,2011,18(8):21-33.(in Chinese)
[8] 吴芳,杨日杰,高青伟.主/被动联合多基地航空搜潜建模与仿真[J].北京航空航天大学学报,2010,36(3):319-323. WU FANG,YANG RIJIE,GAO QINGWEI.Building and simulating associated multi-station aeronautical search models composed of active and passive sonars[J].Journal of Beijing University of Aeronautics and Astronautics, 2010,36(3):319-323.(in Chinese)
[9] 匡贡献,谢志敏.海洋环境对吊放声纳作战使用影响研究[J].海军航空工程学院学报,2010,25(1):24-26. KUANG GONGXIAN,XIE ZHIMIN.Research on the influence of ocean environment on the operational application of dipped sonar[J].Journal of Naval Aeronautical and Astronautical University,2010,25(1):24-26.(in Chinese)
[10] 吴金荣,张建兰,马力.主动声纳方程和传播损失及混响级的定义[J].应用声学,2005,25(3):167-170. WU JINRONG,ZHANG JIANLAN,MA LI.The active sonar equation and the definitions of propagation loss and reverberation level[J].Applied Acoustics,2005,25(3):167-170.(in Chinese)
Design and Realization of aa Certain Type Helicopter Antisubmarine Tactics Training System
CHEN Zun-yin,SUN Ming-tai,WU Wei-ling
(Qingdao Branch,NAAU,Qingdao Shandong 266041,China)
Aiming at the problem of a certain type helicopter antisubmarine training inefficient,the design and realization of a certain type helicopter antisubmarine tactics training based on HLA was given.The system was based on the method of antisubmarine combat simulation modeling,put great emphasis on studing from platform design,configuration,realization of technology from helicopter antisubmarine tactics subjects training simulation based on HLA.The system was used successfully,practice had proved that the design of system was logical,circultor was steady the effect of simulation was vivid.The system could be satisfied with the needs of antisubmarine army tactics training.These models can be used for reference for other antisubmaine helicopters tactics training system.
avation antisubmarine;tactics training;HLA;system simulation
E925;V247.2
A
1673-1522(2014)04-0379-06
10.7682/j.issn.1673-1522.2014.04.017
2013-12-28;
2014-04-24
陈遵银(1965-),男,副教授,硕士。