GTC-15D 多功能拆除机器人的研制
2014-07-11孙立,王飞,王涛
孙 立,王 飞 ,王 涛
(安徽惊天液压智控股份有限公司,安徽马鞍山243000)
现在城市破拆作业中,为减小作业对周边环境的污染,禁止使用爆破,又因城市中相对空间狭小,对于破拆设备的大小尺寸有限制,因此电动机器人是在此种环境下开发的一款遥控多功能作业装备。 此类设备所需能源为电,从而减小对环境的污染,具备作业范围广、操作灵活方便、工作安全可靠等优点,极大地改善了破拆设备对作业环境的污染。 还可应用于水泥、冶金行业中对各种炉窑的打壳、拆砖及拆除。
GTC-15D 拆除机器人是一款电机驱动,用于高危环境下具有精细化作业能力的新型高科技装备。 通过将负载反馈式电液比例系统、基于CAN 总线的数字式双向无线遥控系统, 并装备独特的5 自由度作业机构, 该设备可以在易燃、易爆、易坍塌的危险区域中灵活地、精确地进行全方位、远距离控制的破碎、拆除等作业。整机具有体积小,灵活性强等特点,是机器人技术应用于工程机械领域的发展和跨越。
1 主要技术参数

表1 整机性能
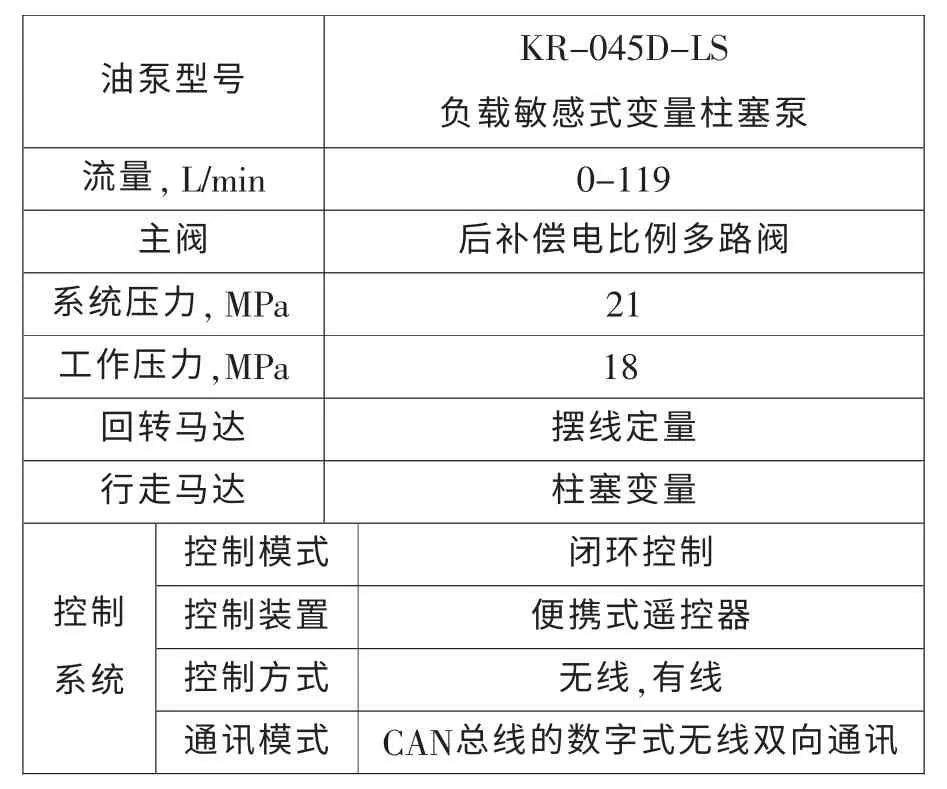
表2 液压系统
2 系统组成
GTC-15D 多功能遥控拆除机器人, 它集仿生技术、通信技术、控制技术、传感技术、机电液一体化技术、冲击振动技术于一体,是机器人破拆技术应用于实践的特种设备,其主要结构见图1,主要由机械系统、动力系统、液压系统、传感与电液比例控制系统、通信系统及照明系统等部分组成。
2.1 机械系统

图1 GTC-15D 拆除机器人结构图
主要包括车体、行走机构、回转平台、多关节机械臂、工具头和液压支腿组成。车体分为上、下车身两部分。 上车内部安装动力系统(电动机)、控制系统、无线通信系统、冷却系统和液压系统等。下车由小型履带运动底盘(含四轮一带、行走马达)、活动车架总成(通过油缸伸缩实现履带架变幅)及4 支液压支腿组成。上、下车之间的液压通道经过中心回转接头连通。
行走机构采用履带式结构,通过两个自身带有制动器的液压马达分别驱动,液压马达设置高速和低速档,最大行驶速度2.3(慢速)/4.2(快速)km/h, 可根据现场机器人负重作业情况不同,选择不同档位行走,行走快慢可远程无级调节。
多关节机械臂由大臂、二臂、三臂及相应的驱动油缸组成,整体为串联式可变三角形机构。
回转机构主要由回转支承、回转平台、回转马达、 回转支架、 中心回转接头等组成。 可做360°回转。
为增加机器人的中心支撑面积,保证机器人的工作稳定性, 车身前后安装有四只液压支腿,前后左右对称布置。
2.2 动力系统
考虑到破拆作业环境限制, 使用清洁能源,电动机器人采用电动机驱动。
2.3 液压系统
机器人液压系统主要由负载敏感式变量柱塞泵、负载敏感电液比例多路换向阀、双作用式液压缸、液压回转马达、二位三通电磁阀、平衡阀以及其它液压元件组成。整个液压系统可以分为主液压回路和负载反馈液压回路两部分。多路换向阀分成4 片和6 片两件,4 片分别用于控制下车左右行走和前后支腿;6 片用于控制工作臂4支油缸、回转马达和液压属具。 二位三通电磁阀(序号5)用于控制履带伸缩,先导油源阀(序号20)用于控制行走快慢速档切换。 两片主阀将负载(Ls 口)串联起来与变量泵控制口相连,从而实现泵阀负载敏感控制。
液压系统的主泵为轴向变量柱塞泵,应用恒功率负载敏感控制技术,并选用负载敏感比例多路阀(阀后补偿方式)为系统的控制核心元件,使泵的输出流量始终与负载需要相适应,从而使系统具有良好的操作性能、节能和系统发热小等优点,故机器人的整体操作性能较好,机器人液压原理图如3 所示。
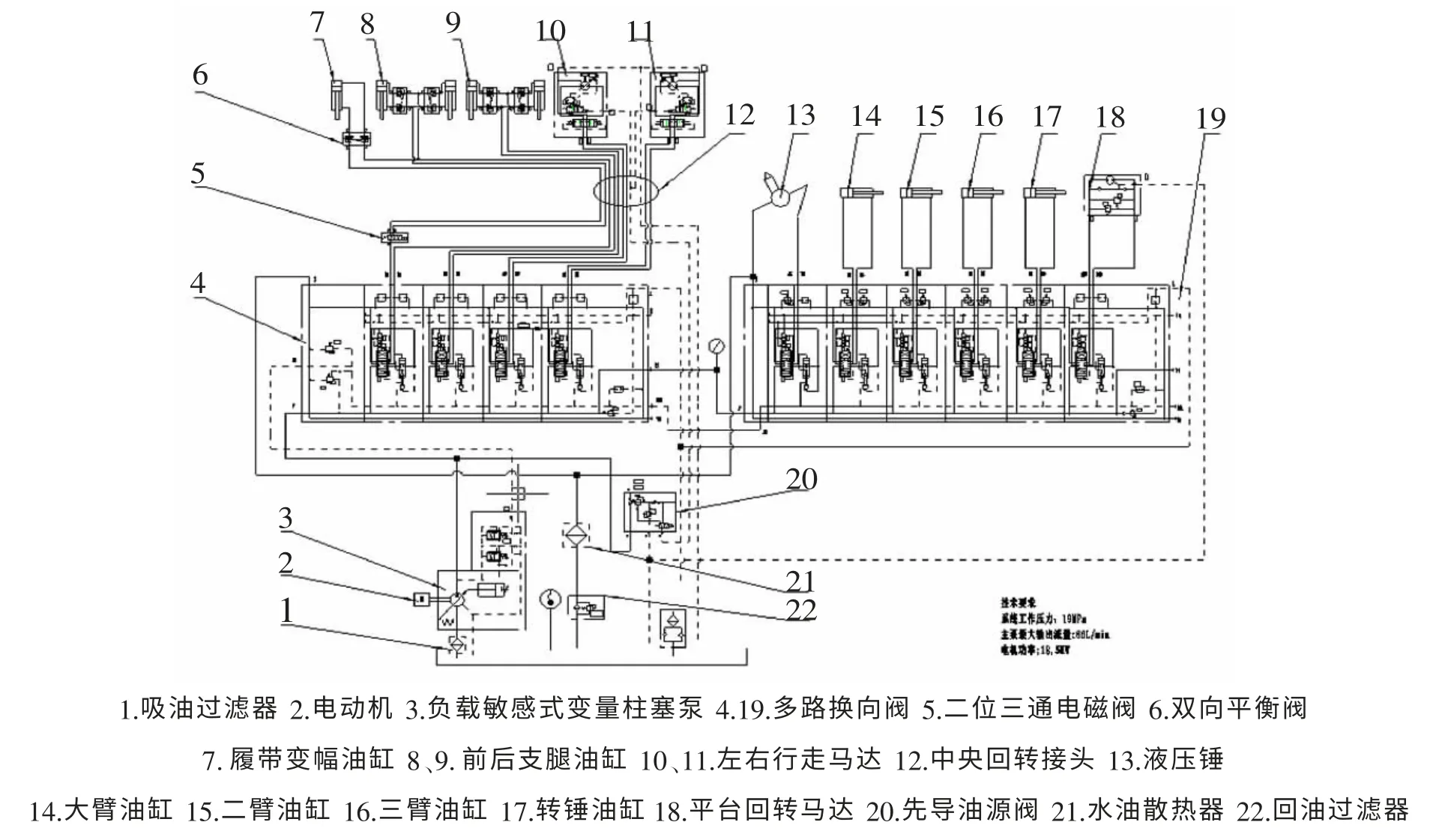
图3 GTC-15D 机器人液压原理图
2.4 传感与电液比例控制系统
机器人液压系统采用基于脉宽调制的电液比例系统进行控制,组成电液比例控制系统的基本元件有控制手柄、控制器、脉宽调制(PWM)驱动电路、电液比例阀及执行机构等部分。 通过遥控手柄发射控制信号,控制电液比例先导阀的输出压力,控制主换向阀阀芯的开口位置,从而实现液压执行元件工作速度的比例调节。
遥控手柄主要由双遥杆(万向)无线/有线信号发射系统(遥控器)、无线/有线信号接收转换系统组成。 接收器安装在机架内,接收天线通过磁座放在机体外部,遥控器控制面板如图4 所示。

图4 机器人遥控器控制面板
2.5 通信系统
通信是机器人必不可少的功能之一。通过通信系统, 机器人可以传递外部或者内部信息,完成诸如传感信息处理数据运算。为保证机器人控制系统具有良好的响应特性和模块扩展性,机器人的通信系统采用CAN 总线通信模式, 利用红外遥控技术建立集成了机器人的整个通信系统,包括机器人通信接口、CAN 总线控制器、遥控发射器、遥控接收器等模块。
3 结论

图5 控制系统组成框图
GTC-15D 拆除机器人样机已出炉, 并已投放市场,在现场实验的跟踪中,其性能达到设计指标,并且开始批量生产。
GTC-15D 型电动拆除机器人开发和研制成功,它的推广应用可以打破国外的技术垄断,填补国内在本领域的技术与生产空白,应用前景广阔。
[1]罗铭,郝其昌,钱国忠.GTC-45 型拆除机器人[J].建筑机械,2007(23):99-103.
[2]徐必勇,罗铭.GTRC-45 型多功能遥控拆除机器人的研制[J].工程机械,2011,(4):2-7.
[3]徐必勇,刘显成,罗铭.新型多功能拆除机器人的研制[J].建筑机械,2013(5):100-104.
[4]刘金国,王越超,李斌 等.灾难救援机器人研究现状、关键性能及展望[J].机械工程学报,2006,42(12):1-12.
[5]徐正飞,徐春权,顿向明.ZXPJ01 型消防机器人的研制[J].机器人,2002(2):159-1641
[6]钱国忠,罗铭.拆除机器人在国外的研发现状及发展趋势[J].建筑机械,2007(15):20-22.