航天器多继电器线圈并联电路的可靠性研究
2014-07-11王国军
陈 丹,王 丹,王国军
(中国空间技术研究院 载人航天总体部,北京 100094)
0 引言
在航天器配电控制系统中,继电器作为控制开关在载人飞船、卫星等航天器上被广泛使用[1-3],为增加可靠性或进行遥测,常采用多继电器线圈并联电路进行配电控制,并采用双二极管串联或二极管串联电阻的消反电路对线圈的反电动势进行抑制[4]。然而,航天器研制及在轨飞行过程中,多继电器线圈并联电路时有各继电器状态不一致的现象发生,且多被认为是由电磁环境干扰引起的,而对于由多只继电器线圈并联引起的继电器线圈之间电磁干扰的探究较少。
目前,航天产品中以继电器为控制开关的配电电路多为以微机电系统(micro-elctro-mechanical system, MEMS)技术为基础的 MEMS继电器电路[5-8]。MEMS技术的应用促进了微小卫星等微型航天器的发展[9-10];但电路体积越小,对其耐受电磁环境的要求就越高,因此有必要对航天器多继电器线圈并联电路的可靠性进行研究。
本文以在载人航天器的配电器研制中多次发现的EL215和TL26P并联发生TL26P误翻转问题为实例,开展航天器多继电器线圈并联电路的可靠性研究。
1 继电器互感效应分析
典型的双线圈磁保持继电器如图1所示。当线圈①中加激励(或去激励)的瞬间,即线圈激励量由0增加至额定值(或由额定值递减至0)时,相应产生的磁通Φ也随之变化,在线圈①中产生自感应电动势的同时,在线圈②中也产生互感应电动势。反之,如果在线圈②中加激励(或去激励)的瞬间,同样也会在线圈②中产生自感应电动势,在线圈①中产生互感应电动势。这就是双线圈继电器2个线圈在激励(或去激励)瞬变过程中必然产生的自感、互感效应[11]。
图1 双线圈磁保持继电器的自感、互感效应Fig. 1 Schematic diagram of self inductance effect and mutual inductance effect in double-coil magnetic latching relay
2 多继电器线圈并联电路可靠性分析
多继电器线圈并联电路的典型电路形式为双继电器线圈并联电路,如图2所示。继电器K1、K2的通指令线圈和断指令线圈分别并联,共用消反电路进行反电动势抑制。

图2 双继电器线圈并联电路Fig. 2 Circuit structure of two relays in parallel
多继电器线圈并联电路可靠工作是指电路中的继电器均能可靠动作,即每个继电器的线圈均正确响应指令脉冲电流。指令执行包含指令发出和指令结束2个动作,在这2个动作瞬间,接收指令的继电器线圈进行激励和去激励,而由于互感效应,未接收指令的线圈中会产生互感应电动势,若存在电流通路则可能导致电路的不可靠工作。
下面从继电器未接收指令的线圈电流着手,分别针对相同型号继电器线圈并联电路和不同型号继电器线圈并联电路进行可靠性分析。
2.1 同型号继电器线圈并联电路
1)指令发出瞬间
在指令P发出瞬间,指令母线给继电器K1与K2的线圈①、③加激励,线圈①、③均产生自感应电动势,同时未接收指令的线圈②、④产生互感应电动势。为了便于分析,忽略同型号继电器的个体差异,默认2个继电器的所有电参数均相同,因此,线圈②、④的互感应电动势相等,指令发出瞬间线圈②、④之间没有电流流过,2个线圈的互感电流i2、i4均汇流至消反电路,ir=i2+i4。此时,继电器线圈并联电路的电流流向如图3所示。

图3 多继电器线圈并联电路在指令发出瞬间的电流流向Fig. 3 Schematic diagram of the current flow (command beginning)
2)指令结束瞬间
在指令P结束瞬间,指令母线给继电器K1与K2的线圈①、③去激励,线圈①、③产生自感应电动势,线圈②、④产生互感应电动势。与指令P发出瞬间的计算类似,由于K1、K2的电参数均相同,指令P结束瞬间线圈②、④的互感应电动势相等,线圈②、④之间没有电流流过。此时,继电器线圈并联电路的电流流向如图4所示。
由上可知,同型号继电器线圈并联电路在指令发出瞬间,继电器未接收指令的线圈电流均汇流至消反电路,线圈之间没有电流流过;在指令结束瞬间,继电器未接收指令的线圈之间没有电流流过。因此,同型号继电器线圈并联电路可以可靠工作。
图4 多继电器线圈并联电路在指令结束瞬间的电流流向Fig. 4 Schematic diagram of the current flow (command ending)
2.2 不同型号继电器线圈并联电路
1)指令发出瞬间
指令P发出瞬间的互感效应仍以图3为基础进行分析,未接收指令线圈②的互感应电动势为

其中,U为指令母线电压。由式(1)可以发现线圈的互感应电动势是呈指数函数变化的,取决于继电器线圈的自感系数L、互感系数M和等效电阻R。同理,未接收指令线圈④的互感应电动势为
为了比较这2个继电器未接收指令线圈的互感应电动势ε2、ε4的大小,将式(2)与式(3)相除,得:
可见,式(3)为关于时间t的恒大于0的指数函数。互感应电动势ε2、ε4不等,而ε2、ε4产生的电流通过消反电路进行消反,故继电器线圈②、④之间没有电流流过,电路可靠。
2)指令结束瞬间
指令P结束瞬间的互感效应仍以图4为基础进行分析,接收指令线圈①的电路为由电阻、电感组成的零输入响应一阶电路,未接收指令的线圈②的互感应电动势为

同理,未接收指令的线圈④的互感应电动势为

为比较这 2个继电器未接收指令线圈的互感应电动势ε2、ε4的大小,将式(4)与式(5)相除,得:

可见,式(6)为关于时间t的指数函数。互感应电动势ε2、ε4不等,而ε2、ε4产生的电流方向不能通过消反电路消反,故继电器线圈之间有电流流过,电路不可靠。若电路在航天器飞行过程中受到电磁干扰,扰动作用增大继电器线圈之间的电流,可能引起继电器的非设计翻转。
2.3 实例计算
以德驰公司的EL215继电器(作为K1)、TL26P继电器(作为K2)为例,计算2个不同型号继电器线圈并联电路在指令结束瞬间的互感应电动势。EL215和TL26P的继电器参数如表1所示。
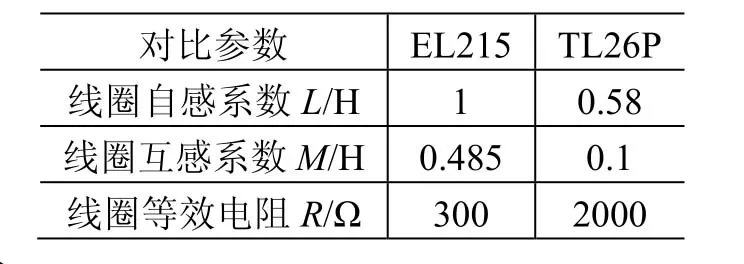
表1 继电器EL215与TL26P的参数Table 1 Parameters of EL215 and TL26P
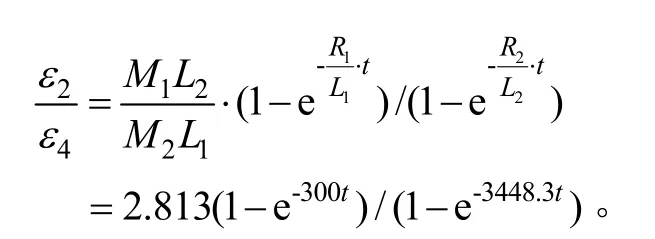
将表1中的参数代入式(6)计算可得:
使用MathCAD工具绘制ε2/ε4随时间t变化的曲线如图5所示。
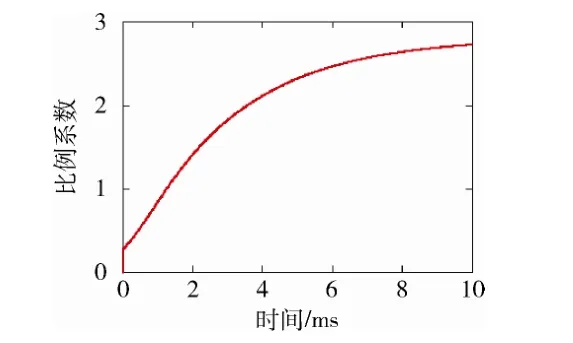
图5 ε2/ε4随时间t的变化(2个二极管串联消反)Fig. 5 ε2/ε4 vs. time (two diodes in series as arc-restraining circuit)
由图5可知,指令结束瞬间继电器未接收指令线圈的互感应电动势比值ε2/ε4在2 ms以内小于1,在2 ms之后常大于1,表示继电器EL215的互感应电动势相较于继电器 TL26P的互感应电动势先小后大。继电器线圈并联电路中未接收指令线圈②、④的互感应电动势在线圈之间进行电流泄放,图4中电流i2、i4表示指令结束瞬间EL215互感应电动势大于继电器 TL26P互感应电动势的电流流向。若未接收指令线圈④通过的电流幅值、持续时间满足继电器K2的动作条件,将使继电器K2的触点状态发生非设计翻转,导致电路的不可靠。若电路在航天器飞行过程中受到电磁干扰使继电器线圈之间的电流增大,也可能引起继电器的非设计翻转。
上述计算是按照消反电路为 2个二极管串联进行的;航天器常用的另一种消反电路为二极管串联电阻的电路形式,见图6。

图6 二极管串联电阻消反的不同型号继电器线圈并联电路Fig. 6 Multi-relay parallel circuit with a diode in series with a resistance as arc-restraining modell
此种电路形式的计算过程与上述计算类似。仍以德驰公司的EL215继电器并联TL26P继电器为例,设定消反电路电阻R为50 Ω。继电器未接收指令线圈的互感应电动势比值为
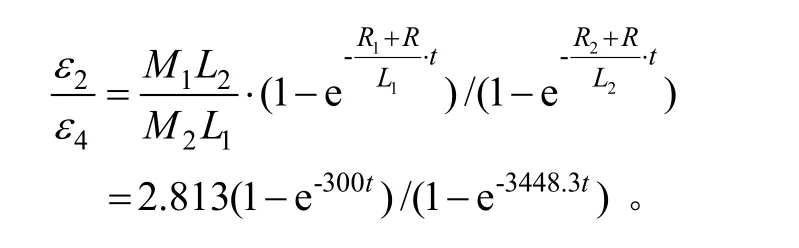
使用MathCAD工具绘制ε2/ε4随时间t变化的曲线如图7所示。
图7 ε2/ε4随时间t的变化(二极管串联电阻)Fig. 7 ε2/ε4 vs. time (a diode in series with a resistance as arc-restraining circuit)
可见,图7与图5波形基本一致,也存在未接收指令线圈④发生非设计翻转的可能,电路仍然不可靠。
3 电路优化
如2.2节所述,不同型号继电器线圈并联电路在指令结束瞬间,由于继电器动作时间不一样,较灵敏的继电器(互感电动势小、动作时间短)存在误翻转的隐患。为此本文对不同型号继电器线圈并联电路进行了优化,在继电器线圈前串接二极管,二极管的阳极接指令母线,阴极接继电器线圈,其电气原理如图8所示。
图8 线圈串接二极管的多继电器线圈并联电路Fig. 8 Multi-relay parallel circuit with a diode in series with a coil as arc-restraining model
P指令发出、结束瞬间,线圈②、④之间的电流通过二极管D2、D4进行截止;Q指令发出、结束瞬间,线圈①、③之间的电流通过二极管 D1、D3进行截止,且串联二极管D1~D4不影响电路正常接收指令以及消反。
4 试验验证
使用2.3节计算实例中的继电器EL215、TL26P对优化后的不同型号继电器线圈并联电路的可靠性进行试验验证。
试验首先抓取优化前电路(电路形式与图3保持一致)在指令发出过程中继电器TL26P线圈③、④的电流波形见图 9、图 10所示。可以发现,在指令发出瞬间和指令结束瞬间,继电器 TL26P的线圈④均有电流流过:在指令发出瞬间,由于线圈③的电流保持在一个常值的工作电流,所以线圈④的电流不会造成继电器 TL26P非设计翻转;而在指令结束瞬间,线圈③的电流为0,因此线圈④通过的电流就有可能造成继电器TL26P非设计翻转,电路不可靠。
图9 继电器TL26P线圈③电流波形图(优化前电路)Fig. 9 Current wave flowing through coil③ of TL26P(original circuit)

图10 继电器TL26P线圈④电流波形图(优化前电路)Fig. 10 Current wave flowing through coil④ of TL26P(original circuit)
然后对按照第 3节优化方案进行了优化的电路进行试验验证,抓取指令发出过程中继电器TL26P线圈③、④的电流波形见图11、图12所示。
可以发现,线圈串联二极管后,继电器TL26P的线圈④仅在指令发出瞬间有电流流过,在指令结束瞬间无电流流过,杜绝了继电器 TL26P发生非设计翻转的可能,电路可靠。

图11 继电器TL26P线圈③电流波形图(优化电路)Fig. 11 Current wave flowing through coil③ of TL26P(optimized circuit)
图12 继电器TL26P线圈④电流波形图(优化电路)Fig. 12 Current wave flowing through coil④ of TL26P(optimized circuit)
5 结论
本文对航天器多继电器线圈并联电路进行了可靠性分析,以及电路优化和试验验证,得到以下结论:
1)在并联继电器线圈采用相同的消反电路的条件下,同型号继电器线圈并联电路在指令发出至结束全过程可以可靠工作。对于不同型号继电器线圈并联电路,由于继电器的动作时间不一样,指令脉冲下降沿瞬间,较灵敏的继电器(如TL26P)有发生翻转的风险。
2)可通过在继电器线圈前串联隔离二极管,来消除由互感电动势大、动作时间长的继电器(如EL215、3JB20等)在指令结束瞬间所产生的感应电流对灵敏继电器的干扰。
(
)
[1]熊晓英, 申小存, 彭梅, 等. 神舟飞船供配电及电缆网设计与研制[J]. 航天器工程, 2004, 13(4): 34-40
Xiong Xiaoying, Shen Xiaocun, Peng Mei, et al. Design and manufacture of the power distribution system and the cable system of Shenzhou spaceship[J]. Spacecraft Engineering, 2004, 13(4): 34-40
[2]马世俊. 卫星电源技术[M]. 北京: 中国宇航出版社,2001: 376-400
[3]阎健. 电磁继电器和固态继电器在回收电路中的应用[J].航天返回与遥感, 2002, 23(1): 1-3
Yan Jian. Electromagnetic relay and solid state relay applied in the electrocircuit of the recovery system[J].Space Recovery & Remote Sensing, 2002, 23(1): 1-3
[4]Q/W1122.2—2007 航天器电子元器件选择和应用: 第2部分 继电器[S]. 北京: 中国空间技术研究院
[5]李慧娟, 尤政, 张高飞, 等. MEMS微型双稳态电磁继电器的设计[J]. 功能材料与器件学报, 2008, 14(2):500-503
Li Huijuan, You Zheng, Zhang Gaofei, et al. A fast and low power consuming double stability MEMS microrelay[J].Journal of Functional Materials and Devices, 2008, 14(2):500-503
[6]尤政, 李慧娟, 张高飞. MEMS微继电器及其关键问题研究现状[J]. 压电与声光, 2006, 28(1): 278-281
You Zheng, Li Huijuan, Zhang Gaofei. An review of MEMS-based microrelay evolution and its key issues[J].Piezoelectectrics & Acoustooptics, 2006, 28(1): 278-281
[7]黄虎, 尤政, 阮勇. MEMS继电器典型结构及其研究进展[J]. 传感器与微系统, 2011, 30(7): 1-4
Huang Hu, You Zheng, Ruan Yong. Typical strctures and developing trends of MEMS relays[J]. Transducer and Microsystem Technologies, 2011, 30(7): 1-4
[8]Song Yong-Ha, Han Chang-Hoon, Kim Min-Wu. An electrostatically actuated stacked-electrode MEMS relay with a levering and torsional spring for power applications[J]. Journal of Microelectromechanical 2012, 21(5): 1209-1217
[9]邓明泉, 尤政, 张晓敏. 皮型卫星的发展与 MEMS卫星设计[J]. 中国航天, 2003(7): 32-36
Deng Mingquan, You Zheng, Zhang Xiaomin.Picosatellite development and MEMS satellite design[J].Aerospace China, 2003(7): 32-36
[10]谭晓昀, 刘晓为. 应用MEMS技术加快微小卫星及微卫星的发展[J]. 仪器仪表学报, 2004, 25(z3): 598-600
Tan Xiaoyun, Liu Xiaowei. Development of small satellite and micro-satellite speed up by MEMS technology[J]. Chinese Journal of Scientific Instrument,2004, 25(s3): 598-600
[11]吴义彬, 张茂松, 袁朝阳. 双线圈继电器线圈互感效应导致的可靠性问题案例研究[J]. 继电器, 2007,35(3): 77-82
Wu Yibin, Zhang Maosong, Yuan Chaoyang. Case study of reliability induced by coil mutual inductance effect of the double-coil relay[J]. Relay, 2007, 35(3): 77-82
