基于动力学模型的弹道式再入弹道估计方法*
2014-07-10江晓东谢京稳郭军海
江晓东,谢京稳,郭军海
(北京跟踪与通信技术研究所,北京 100094)
0 引言

飞行器再入大气飞行的特点是速度快,并由于受到复杂的空气动力影响而呈现出强的非线性特性[2]。Julier和Uhlmann[3-4]等利用UT(unscented transform)变换,提出unscented Kalman filter(UKF),由于不需要对非线性系统进行线性化,可有效地应用到非线性系统的状态估计中。文献[5-6]在再入目标弹道估计的背景下,对3种非线性滤波——扩展卡尔曼滤波(extended Kalman filter,EKF),UKF和粒子滤波(particles filter,PF)的滤波性能进行了对比分析,从计算量、滤波性能和滤波的稳健性上综合考察,UKF是这3种滤波算法中最优的。

1 弹道式再入目标的动力学模型
弹道式再入飞行器在再入过程中只受到空气阻力和重力的作用,在地心惯性坐标系[7]下,其总加速度的表达式为[7]:
a=aD+aG+w,
(1)
式中:a为目标的总加速度;aD为空气阻力引起的加速度;aG为地心引力引起的加速度;w为系统状态噪声,假定服从高斯分布,其方差为模型设计参数。
在地心地固坐标系[7]下,加速度表达式在式(1)的基础上修正为
(2)
式中:ar为目标相对总加速度;ωe为地球自转角速度向量;p为目标的位置向量;v为再入体相对大气的速度向量;2ωe×v为科里奥利力引起的加速度;ωe×(ωe×p)为惯性离心力引起的加速度。
空气阻力的方向与目标相对于空气的速度矢量v相反,与空气密度ρ和目标速度v的平方成正比,空气阻力引起的加速度为
(3)
式中:uv=v/|v|为vr的单位向量;ρ(h)为空气密度,h为高程,本文中采用文献[8]提出的大气密度模型。
α(t)为阻力参数,其倒数β(t)=1/α(t)也称弹道系数。对弹道式再入飞行器来说,α(t)是一个非常重要的参数,它通常是未知变量,因此经常也将其作为待估状态参量,增加到运动状态向量中,使得状态向量从6维变为7维X=(x,y,z,vx,vy,vz,α)T。α(t)的建模方式有多种,适用于不同的环境。文献[7]对其模型进行了系统的总结。本文选用指数模型,即对阻力参数的比率γln(α/α0)进行建模:
α(t)=α0exp(γ(t)),
(4)
(5)
式中:ωγ(t)为高斯白噪声;α0为预先知道的典型阻力参数。这样,待估状态向量变为X=(x,y,z,vx,vy,vz,γ)T。这种建模方式需要先验信息α0,但保证了阻力参数恒正,这对于保证滤波的稳定性至关重要[3]。
基于式(1)和(3),将加速度的矢量形式写成分量形式,整理可得
(6)

最后,基于方程(5)和(6)可得弹道式再入飞行器的动力学模型为
(7)
将此模型记为BRV-Exp模型,式(7)为变系数非线性常微分方程组,难以给出解析解,但可借助欧拉积分法或龙格库塔法给出数值解,以便进行状态参量的预测。
2 多台雷达的测量模型
单台雷达的测量模型[9]为
(8)
记为
Y1(k)=h1(X(k))+v1(k),
(9)

基于N台雷达的总测量模型为[10]
Y(k)=h(X(k))+v(k),
(10)
式中:Y(k)=(Y1(k),Y2(k),…,YN(k))T;
h(·)=(h1(·),h2(·),…,hN(·))T;
v(k)=(v1(k),v2(k),…,v3(k))T.
设v(k)服从正态分布N(0,R(k)),R(k)=diag(R1(k),R2(k),…,RN(k)),这样基于状态转换模型(7)和测量模型(10),就可利用UKF进行再入目标的弹道估计了。
3 不敏卡尔曼滤波(UKF)
UKF是由Julier等人首先提出的。UT变换是UKF的基础,它通过构造一个确定的点集(Sigma点),使得它与当前状态具有相同的统计特征,即均值和方差相同。具体来说,UT变换利用当前状态(均值和方差)构造点集{Xi(k)},然后让每个点Xi(k)通过非线性方程,得到非线性变换后的点集{Yi(k)},预测均值和方差可以在{Yi(k)}点集上求得。
设待估状态向量维数为L,则Sigma点的个数为一般为2L+1,为了增加Sigma点的个数,以提高估计精度,通常需要对状态向量进行扩维,扩维后的状态向量由目标状态向量,状态噪声和测量噪声组成,即Xa=(XT,vT,nT)。扩维UKF(augmented UKF,AUKF)算法流程如下[11]:
初始化:
(11)
(12)
(13)

(14)
计算Sigma点及其权值:
(15)
(16)
(17)
(18)
预测:
(19)
(20)
(21)
(22)
(23)
更新:

(24)
(25)
(26)
(27)
(28)

4 仿真结果与分析


图1 再入目标的轨迹及测量雷达布局图Fig.1 Trajectory of re-entry target and measuring-radar layout
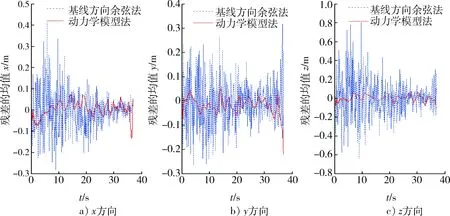
图2 位置分量残差的均值对比图Fig.2 Comparison chart of position residuals error mean

图3 速度分量残差的均值对比图Fig.3 Comparison chart of velocity residuals error mean

图4 位置分量的均方根误差对比图Fig.4 Comparison chart of position root-mean-square error

图5 速度分量的均方根误差对比图Fig.5 Comparison chart of velocity root-mean-square error
表1 均方根误差的均值Table 1 Mean of velocity root-mean-square error

方法名称Δx/mΔy/mΔz/mΔvx/(m·s-1)Δvy/(m·s-1)Δvz/(m·s-1)基线方向余弦法0.870 20.967 11.965 80.055 40.094 40.156 4动力学模型法 0.133 70.135 20.253 60.029 60.036 70.070 1
5 结束语
参考文献:
[1] 蔡洪.Unscented Kalman滤波用于再入飞行器跟踪[J].飞行器测控学报,2003,22(3):12-16.
CAI Hong.Unscented Kalman Filtering for Reentry Vehicle Tracking[J].Journal of Spacecraft TT&C Technology,2003,22(3):12-16.
[2] 蔡洪,张金槐.导弹飞行试验多站测量定轨的自适应滤波方法[J].航天控制,1997(2):17-22.
CAI Hong,ZHANG Jin-huai.Adaptive Filtering Approaeh for Missile Flight Test Trajectory Deterrulnation Under Multiple Station Measuring[J].Aerospace Control,1997(2):17-22.
[3] JULIER S J,UHLMANN J K.Unscented Filtering and Nonlinear Estimation[J].Proc.IEEE,March 2004,92(3):401-422.
[4] JULIER S J,UHLMANN J K,DURRANT-WHYTE H F.A New Method for Nonlinear Transformation of Means and Covariance in Filters and Estimators[J].IEEE Trans.Automatic Control,Mar.1996,AC-45(3):477-482.
[5] FARINA A,RISTIC B,BENVENUTI D. Tracking a Ballistic Target:Comparison of Several Nonlinear Filters[J].IEEE Transactions On Aerospace and Electronic Systems July 2002,38(3):854-867.
[6] RISTIC B,FARINA A,BENVENUTI D. Tracking a Ballistic-Entry Object:Performance Bounds and Comparison of Non-Linear Filters[C]∥IDC-2002,Adelaide,Australia,February 2002:259-264.
[7] LI X R,JILKOV V P.A Survey of Maneuvering Target Tracking-Part II:Ballistic Target Models[C]∥2001 SPIE Conf on Signal and Data Processing of Small Targets,San Diego,CA,USA,July August 2001,Vol.4473:559-581.
[8] 杨炳尉. 标准大气参数的公式表示[J]. 宇航学报,1983,1(1):83-86.
YANG Bing-wei.Formulization of Standard Atmospheric Parameters[J]. Journal of Astronautics,1983,1(1):83-86.
[9] LI X R,JILKOV V P.A Survey of Maneuvering Target Tracking-Part Ⅲ:Measurement Models[C]∥2001 SPIE Conf on Signal and Data Processing of Small Targets,San Diego,CA,USA,July August 2001,4473: 423-446.
[10] 丁维福.多传感器信息融合理论及其在机动目标跟踪中的应用[D].西安:西北工业大学,2007:19.
DING Wei-fu.Multi-Sensor Information Fusion Theory and Its Applications to Maneuvering Target Tracking[D].Xi’an:Northwestern Polytechnical University,2007:19.
[11] WAN E A,MERWE R M.The Unscented Kalman Filter [M/OL].(2001-08-01)[2009-04-03]http:∥stomach.v2.n1/docs-/TechPubs/Tracking_and_AR/wan01/unscented.pdf.
[12] 胡绍林,许爱华,郭小红.脉冲雷达跟踪测量数据处理技术[M].北京:国防工业出版社,2007:120-135.
HU Shao-lin,XU Ai-hua,GUO Xiao-hong .Pulse Radar Tracking Measurement Data Processing Technology[M].Beijing:National Defence Industry Press,2007:120-135.