拖曳式诱饵对抗方法分析
2014-07-10张兵白渭雄付孝龙
张兵,白渭雄,付孝龙
(空军工程大学 防空反导学院,陕西 西安 710051)
0 引言
随着精确制导武器的不断发展,作战飞机的安全受到严重威胁。为了提高作战飞机的自卫能力,拖曳式诱饵( towed radar decoy,TRD)的研究受到普遍关注,并被应用于保护载机平台的安全。在科索沃战争中,美军首次将拖曳式有源雷达诱饵装备到战斗机上,成功诱骗了敌方10枚防空导弹[1-4]。作为一种典型的双点源干扰,目前,拖曳式诱饵的研究主要集中在干扰问题上,如干扰原理、干扰性能以及干扰的有效性评估等,而关于拖曳式诱饵的存在性检测以及对抗方法的研究少之又少。近几年国内双点源对抗技术的研究主要体现在反辐射导弹抗诱饵技术、有源雷达诱饵对抗技术和雷达光电对抗技术,而国外关于双点源技术的研究文献主要集中在作用机理、系统设计、仿真分析等方面,关于其对抗方法的研究通常都未作深入的讨论,只是点到即止。所以,寻求拖曳式诱饵的有效对抗方法是目前亟待解决的问题。
1 拖曳式诱饵
1.1 干扰机理分析
拖曳式诱饵干扰主要用来保护机载平台,当飞机遭到导弹袭击时,载机发射诱饵,诱饵通过拖曳线与载机相连,形成双点源干扰,欺骗敌方雷达,从而保护己方飞机安全。拖曳式诱饵作为一种典型的非相干双点源干扰[5],工作示意图如图1所示,其干扰过程主要包括4个阶段[6]。

图1 拖曳式诱饵工作示意图Fig.1 Working schematic diagram of TRD
(1) 雷达告警,载机释放诱饵
当机载雷达告警器发现受到导弹威胁时,载机释放诱饵。通过截获弹上导引头发射的信号,形成干扰信号,诱饵通过转发或者应答模式发射干扰信号。开始阶段,载机距雷达较远,加之诱饵与载机的运动特性基本一致,雷达无法从距离、速度和角度上分辨出诱饵。
(2) 载机机动,形成三角态势
机动的目的有2个,其一是避免载机与诱饵形成无效锥区;其二是拉大了弹目连线与弹诱连线之间的夹角θ,得到更好的角度欺骗效果。
(3) 夹角θ增大,导引头被诱骗
随着导弹与目标的距离减小,夹角θ逐渐增大。因为拖曳式诱饵干扰信号的功率一般比目标回波功率大,根据双点源干扰的原则,导弹导引头的跟踪角将位于目标与诱饵之间,且靠近功率较大的诱饵。随着载机的机动,载机将会向雷达波束的边缘移动。
(4) 载机逃离,精确打击失败
当目标与诱饵的夹角大于雷达导引头波束宽度一半时,载机逃离雷达波束,只剩下拖曳式诱饵在雷达波束内。在这种情况下,导弹丢失目标,跟踪并击中诱饵,精确打击失败。
1.2 关键参数分析[2,7-8]
(1) 拖曳线长度
拖曳线长度L是拖曳式诱饵的关键参数之一,其长度选取一般考虑以下因素:导弹杀伤半径、导引头跟踪特性、对飞机机动的影响、诱饵等效干扰功率。
为了保证载机的安全,一般诱饵与载机之间的距离应大于导弹杀伤半径的2倍[2]。若诱饵的干扰功率与目标的回波功率的比值(干信比)为1,拖曳线长度应大于导弹杀伤半径的2倍;若干信比大于1,导引头波束中心偏向诱饵,拖曳线长度可适当缩短。但是,拖曳线又不能太长。一方面,导引头角度跟踪系统对诱饵相对于载机的最大横向距离和最大纵向距离提出了限制,如果超过限制, 导引头可以从角度和距离上对诱饵和载机进行识别。另一方面,拖曳线太长,当载机机动时,诱饵会危及载机的安全,所以拖曳线长度也不能过长。
综合以上因素,拖曳线长度一般选取为90~150 m。实际中,运输机的拖曳线长度是90~120 m,战斗机的拖曳线长度是100 m左右[7]。
(2) 无效锥角区
当导弹以小角度攻击目标时,存在一个锥角范围,诱饵不能发挥对导弹的干扰作用。当导弹攻击目标时,导弹受到诱骗朝点O来袭,追尾攻击时,由于诱饵体积较小,通常不会引爆导弹,这样导弹将会从目标与诱饵间穿越,当导弹经过目标附近时近炸引信引爆导弹,目标位于导弹的杀伤半径之内,导弹将击伤目标;导弹迎头攻击时,由于导弹和目标的相对速度很高,加之导弹的攻击距离有不可能很远,多数情况下目标很难快速形成有效的“三角态势”,目标比较容易被击落或击退。因此,如图2所示,在以飞机与诱饵的连线为轴,以诱饵为顶点的立体锥形区域内,诱饵不能保护飞机。该锥体的张角为
β=arcsin(kRk/L),
(1)
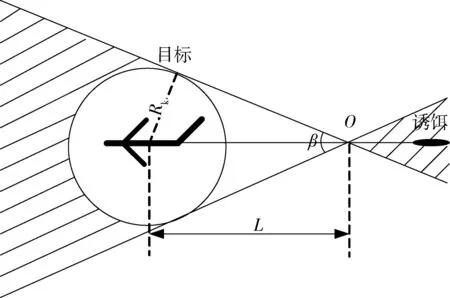
图2 无效锥角区示意图Fig.2 Schematic diagram of invalid cone angle area
式中:Rk为导弹的杀伤半径;k为安全系数,一般取1.5~2;L为目标与诱饵之间的距离。这个区域就是诱饵的无效锥角区。
(3) 诱饵等效干扰功率
为了使导弹瞄准的“质心”位于载机与诱饵连线的中点或者更加靠近诱饵,则要求诱饵的干扰功率Pg等于或大于目标的回波功率Pm,即干信比K=Pg/Pm≥1,一般取2~10。
(4) 脱离距离
随着导弹与目标的距离减小,弹目连线与弹诱连线之间的夹角逐步增大,目标将会向雷达波束的边缘移动,最终逃离雷达主瓣波束。定义目标的脱离距离为:目标刚要逃离雷达的主瓣波束时所对应的最大的临界逃逸距离RE[8],如图3所示。
RE=L/sin(θB/2).
(2)
脱离距离与拖曳线长度和雷达主瓣波束宽度有关,拖曳线越短,波束越宽,脱离距离越近。

图3 脱离距离示意图Fig.3 Schematic diagram of escaping distance
1.3 技术特点
(1) 回波信号和干扰信号之间存在延迟
新型拖曳式诱饵,如AN/ALE-55,其接收和发射系统分别位于载机和诱饵上,这样既有效改善了收发隔离的问题,又减小了诱饵的质量和体积[3]。由于拖曳线的存在,诱饵的干扰信号相对于载机回波信号的延时为
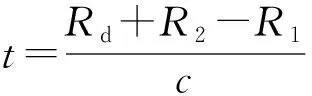
(3)
(2) 实现角度欺骗
当目标和诱饵同时处于雷达的瞬时波束范围内,两者形成非相干双点源干扰,对雷达导引头造成角度欺骗,雷达始终跟踪在双点源之间,且偏向信号能量大的点源。
(3) 在速度和角度上不可分辨
由于诱饵是被载机拖曳着飞行,两者具有相同的运动特性,加之诱饵与目标共处于雷达的半功率波束宽度内,所以无法在速度和角度上分辨目标和诱饵。
(4) 对光学探测系统没有干扰作用
由于光学探测系统与诱饵工作在不同谱段,因此拖曳式诱饵对激光、红外或者可见光电视等构成的光学探测系统没有任何干扰能力。
2 拖曳式诱饵的对抗方法
从拖曳式诱饵的技术特点出发,目前研究中提出的一些对抗方法主要有以下几种:脉冲前沿切割、脉冲压缩技术、光学探测等方法,但是这些方法都存在一定缺陷。比如,脉冲前沿切割法和脉冲压缩技术都存在脉宽能否满足角度测量系统测量时间的问题;光学探测作用距离存在与雷达作用距离的匹配问题。因此,寻求更为有效的对抗方法是亟待解决的问题。
(1) 高分辨体制
由于拖曳线的存在,诱饵与载机在速度和距离上总存在微小的差异。通过提高雷达信号的测距、测速分辨力,比如利用具有较好距离或速度分辨力的线性调频信号和相位编码脉冲压缩信号,对载机和诱饵在距离和速度上存在的微小差异进行分离,从而达到目标识别的目的。另外,文献[9]提出了一种超分辨波达方向估计方法,它是基于噪声子空间不变性的改进MUSIC算法,对于目标和非相干雷达诱饵具有很好的角度分辨力。可见,使用高分辨体制对抗拖曳式诱饵具有一定的可行性。
(2) 发射特殊雷达信号[10]
拖曳式诱饵通过对雷达探测信号进行放大转发,对雷达形成双点源干扰,达到角度欺骗的目的。可以考虑增强雷达的主动“进攻”意识,在发射雷达信号时附加噪声干扰信号,使敌方无法获得己方雷达信号的参数信息,诱饵也就失去了干扰作用。作为一种主动防御手段,这种方法还有待进一步验证。
(3) 极化抗干扰
极化是电磁波的基本属性之一,目标在反射电磁波的同时会改变电磁波的极化状态,其变极化效应蕴含了目标的特征信息,极化信息能够反映出目标结构、材料、形状、姿态取向等特征,是完整刻画目标属性不可或缺的重要特征,充分利用极化信息可以有效提高雷达系统的目标识别和抗干扰性能。
文献[11~13]从不同方面分析了极化信息在弹道导弹突防和弹道导弹目标识别中的应用,通过理论分析和实验仿真,证实了这些方法的可行性和有效性。拖曳式诱饵作为一种典型的双点源干扰,可以对雷达在速度、角度和距离上进行欺骗,但雷达可以通过回波信号和干扰信号在极化信息上存在的较大差异实现对目标和诱饵的区分。从目前的研究来看,利用极化信息进行真假目标识别的方法较多,如何将其更好地应用于对抗双点源干扰具有一定的研究意义。
(4) 信息融合复合制导技术
考虑到拖曳式诱饵对激光、红外或者可见光电视等构成的光学探测系统没有任何干扰能力,可以用激光测距仪对目标进行测距,用红外热像仪或光学电视对目标进行角度探测和跟踪[7]。但是,由于光学探测设备作用距离与雷达作用距离的匹配问题,光学探测设备无法对远距离的目标和诱饵进行探测和识别。为了更好地对抗拖曳式诱饵,采取雷达加光电的复合制导方式。远距离时采用雷达对目标进行探测和跟踪,近距离时转入光学探测系统对目标和诱饵进行分辨和跟踪,进行红外成像制导,对目标进行打击,从而解决作用距离不匹配和抗干扰的问题。
文献[14]研究了基于数据融合技术的诱饵鉴别方法,该方法基于雷达诱饵无法干扰红外导引头的基本原理,研究了导弹采用微波和红外成像双模复合制导导引头后,利用数据融合技术实现对拖曳式诱饵的干扰判定,这一方法对于抗其他双点源干扰也是有效的,但是由于采用了双模制导使得导引头设备复杂度增加,同时也带来了在红外谱段的对抗问题。
关于红外谱段的对抗问题,这就要考虑红外热像仪的角度分辨率了。影响热像仪角度分辨率的因素主要有2个:①由探测器阵元的量化作用而造成的对热像仪空间角度分辨能力的限制;②由于光学衍射而形成的弥散斑而造成的对热像仪空间角度分辨能力的影响。显然,热像仪的分辨率取决于两者中较好的一个。假设热像仪的参数指标为:其大视场为7.20°×5.40°,小视场为2.40°×1.80°。对工作于λ=8~12 μm的热像仪,其由于光学衍射而引起的角分辨率为0.11 mrad。而当视场为2.4°×1.8°时,阵元数为288×4、并经80次水平扫描后,则在水平方向的角分辨率为2.4°/320=0.13 mrad,在垂直方向的角分辨率为1.8°/288=0.11 mrad;而当视场为7.2°×5.4°时,则在水平方向的角分辨率为7.2°/320=0.39 mrad,在垂直方向的角分辨率为5.4°/288=0.326 mrad。在对目标的跟踪过程中,为了提高探测距离,热像仪通常工作于小视场状态,从上面的分析中可知,此时其角度分辨率为0.13 mrad×0.11 mrad(0.45′×0.375′),比制导雷达的角度分辨率(通常在1°左右)高出130多倍以上。这样,在距热像仪35 km远,与热像仪的视线方向垂直、间距5 m的两红外点源,就可被热像仪分辨。因此,红外诱饵不会对热像仪造成角度欺骗,需要做的是在目标和诱饵中如何识别真目标,当然这种情况下,可以发挥跟踪操作员的作用,根据目标运动特征识别并跟踪真正的目标。可以看出,采取雷达加光电的复合制导方式对抗拖曳式诱饵具有一定的可行性和研究价值。
(5) 多角度攻击模式[9]
从前面的分析中可以看出,当导弹以小角度攻击目标时,存在一个无效锥角区,诱饵将不能保护载机。因此,可以利用该无效锥角区,采取多角度攻击模式,使导弹在多角度下形成迎头或追尾攻击模式,就算敌机机动也无法很好地脱离无效锥角区,从而达到击落或击退敌机的目的,如图4所示。但这种模式下为了攻击一架敌机需发射3枚甚至更多导弹,导致这种“围追堵截”的战术费效比太低,在实战应用中会受到极大的限制。
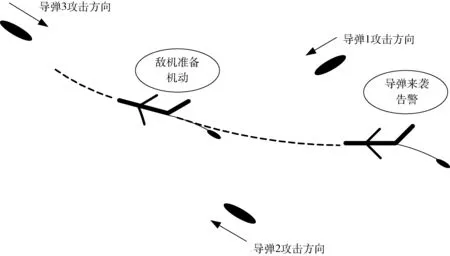
图4 多角度攻击模式Fig.4 Multi-angle attack pattern
3 结束语
目前,拖曳式诱饵已经发展成为一种极其有效的干扰方式,对于地空导弹武器系统产生了极大地威胁和挑战,如何更有效地识别和对抗拖曳式诱饵则成为目前亟待解决的问题。本文通过分析拖曳式诱饵的工作原理和技术特点,在总结目前研究的基础上,提出了一些对抗方法和新思路,也许无法从根本上解决拖曳式诱饵的抗干扰问题,但能够对拖曳式诱饵的对抗技术研究提供一些思路,具有一定的参考价值。
参考文献:
[1] 张永顺,童宁宁,赵国庆.雷达电子战原理[M].2版.北京:国防工业出版社,2010:153-155.
ZHANG Yong-shun, TONG Ning-ning, ZHAO Guo-qing. Principle of Radar Electronic Warfare[M].2nd ed.Beijing: National Defence Industry Press,2010: 153-155.
[2] 董会旭,白渭雄,李东伟, 等.拖曳式诱饵对抗研究[J].飞航导弹,2011(6):91-95.
DONG Hui-xu, BAI Wei-xiong, LI Dong-wei, et al. Study on Countermeasure of Towed Radar Decoys[J]. Winged Missiles Journal,2011(6): 91-95.
[3] 白渭雄,唐宏,陶建峰.拖曳式诱饵对单脉冲雷达的干扰分析[J]. 电子信息对抗技术,2007,11(6):39-42.
BAI Wei-xiong, TANG Hong, TAO Jian-feng. Analysis of Towed Decoy Jamming on Monopulse Radar[J]. Electronic Information Warfare Technology,2007,11(6):39-42.
[4] 侯向辉,刘晓东,李仙茂.拖曳式诱饵诱骗防空导弹探讨[J].舰船电子对抗,2010,33(1):40-43.
HOU Xiang-hui, LIU Xiao-dong, LI Xian-mao. Discussion of Towed Decoy Deceiving Air Defence Missile[J]. Shipboard Electronic Countermeasure,2010,33(1):40-43.
[5] 赵兴录,项春望,李秋生.地空导弹武器系统抗拖曳式干扰方法[J].现代雷达,2013,35(3):1-4.
ZHAO Xing-lu,XIANG Chun-wang,LI Qiu-sheng. Method on Ground-to-Air Missile Weapon System Countering Towed Decoy Jamming[J]. Modern Radar,2013,35(3):1-4.
[6] SONG Zhi-yong, XIAO Huai-tie, ZHU Yi-long, et al. A Novel Approach to Detect the Unresolved Towed Decoy in Terminal Guidance[J]. Chinese Journal of Electronics,2012,21(2):367-373.
[7] 白渭雄,焦光龙,付红卫.拖曳式诱饵对抗技术研究[J].系统工程与电子技术,2009,31(3):580-582.
BAI Wei-xiong, JIAO Guang-long, FU Hong-wei. Study on Antagonistic Technology of Towed Decoys[J]. Systems Engineering and Electronics,2009,31(3):580-582.
[8] 何传易,卢再奇.拖曳式诱饵干扰关键参数分析[J].航天电子对抗,2009,25(4):11-14.
HE Chuan-yi, LU Zai-qi. Key Parameters Analysis of Towed Decoy[J]. Aerospace Electronic Warfare,2009,25(4):11-14.
[9] SI Wei-jian, SI Xi-cai, QU Zhi-yu. New Method for Passive Radar Seeker to Antagonizenon-Coherent Radar Decoy[J]. Journal of Systems Engineering and Electronics, 2010,21(3):397-403.
[10] 陈义,崔艳鹏,钟昭.有源拖曳式诱饵的干扰样式及对抗措施探讨[J].航天电子对抗,2011,27(5):11-12.
CHEN Yi, CUI Yan-peng, ZHONG Zhao. Jamming Modes and Countermeasures of TRAD[J]. Aerospace Electronic Warfare,2011,27(5):11-12.
[11] 王福友,罗钉,刘宏伟.基于极化不变量特征的雷达目标识别技术[J].雷达科学与技术,2013,11(2):165-172.
WANG Fu-you, LUO Ding, LIU Hong-wei. Radar Target Classification Based on Some Invariant Properties of the Polarization[J]. Radar Science and Technology, 2013,11(2):165-172.
[12] 刘勇,李永祯,王雪松, 等.基于极化分集接收的HRRP欺骗干扰鉴别方法[J].系统工程与电子技术,2011,33(6):1247-1251.
LIU Yong, LI Yong-zhen, WANG Xue-song,et al. Discrimination of HRRP Deception Jamming Based on Polarization Diversity Receiving[J]. Systems Engineering and Electronics, 2011,33(6):1247-1251.
[13] 李永祯,王雪松,肖顺平, 等.基于IPPV的真假目标极化鉴别算法[J].现代雷达,2004,26(9):38-42.
LI Yong-zhen, WANG Xue-song, XIAO Shun-ping, et al. A New Polarization Discrimination Algorithm for Active Decoy and Radar Target Based on IPPV[J]. Modern Radar,2004,26(9):38-42.
[14] 李朝伟.基于数据融合技术对抗有源诱饵研究[J].电子对抗技术,2004,19(2):27-30.
LI Chao-wei. Research on the Countermeasures Against Towed Active Decoys Based on Data Fusion[J]. Electronic Countermeasure Technology, 2004,19(2):27-30.