某桁架式桥梁检测车垂直臂刚架结构的拓扑及尺寸优化
2014-07-09任建峰许伟龙姜文光
单 龙,崔 哲,任建峰,牛 松,许伟龙,姜文光
(1.清华大学 机械工程系,北京 100084;2.燕山大学 机械工程学院,河北 秦皇岛 066004)
桥梁检测车是一种可以为桥梁检测人员在检测过程中提供作业平台,装备有桥梁检测仪器,用于流动检测和(或)维修作业的专用汽车。它可以随时移动位置,能安全、快速、高效地让检测人员进入作业位置进行流动检测或维修作业[1]。
桁架式桥梁检测车采用通道式工作平台,稳定性好,承载能力大,使用时检测人员能方便地从桥面进入平台或返回桥面。垂直臂是用来连接桥下工作平台与桥上车体,调节伸缩臂平台的升降,是主要受力构件,其强度和刚度对检测车在作业时的稳定性和安全性有着决定性作用,因此对垂直臂结构进行静力学计算分析是非常必要的[2]。
由于桁架式桥梁检测车结构一般较大并且非常复杂,所以以往人们多是在SolidWorks、Pro/E等三维造型软件中建好桥检车结构的几何模型,然后通过HyperMesh建立简化有限元模型,最后用有限元求解软件进行计算[3]。本文为了模拟垂直臂与连接架滑块间的真实滑动副关系,利用ANSYS中的APDL语言建立了桥检车结构的参数化有限元模型,并且在垂直臂与滑块接触部位添加了面面接触单元,对垂直臂进行了接触计算。
1 桁架式桥梁检测车简介
桁架式桥梁检测车采用了四级伸缩、二级回转、三级变幅机构,形成了三维空间,六个自由度的空间运动体系。可以在桥下形成独立工作平台,方便工作人员行走。某型号桁架式桥梁检测车整机结构如图1所示。

图1 某型号桁架式桥梁检测车整车结构示意图
其主要由车架平台、转台、连接架、垂直臂、二回转、基本臂和伸缩臂等部分组成。其中转台可以实现升降、伸缩、变幅;作业平台(基本臂和伸缩臂)可延伸至桥底;垂直臂可以升降。
2 参数化有限元模型建立
由于接触问题是一种高度非线性行为,求解过程需要反复迭代计算。所以,为了提高计算效率,节省计算机资源,而又能真实的反映出垂直臂在工作时的受力状态,选取了伸缩臂、基本臂、二回转、垂直臂、连接架等五部分作为整体进行静力学有限元分析。
2.1 垂直臂参数
某桁架式桥梁检测车垂直臂是由无缝方钢管焊接而成的刚架结构,如图2所示。垂直臂主管和弦杆均采用Q460管材,主管截面示意图如图3所示。
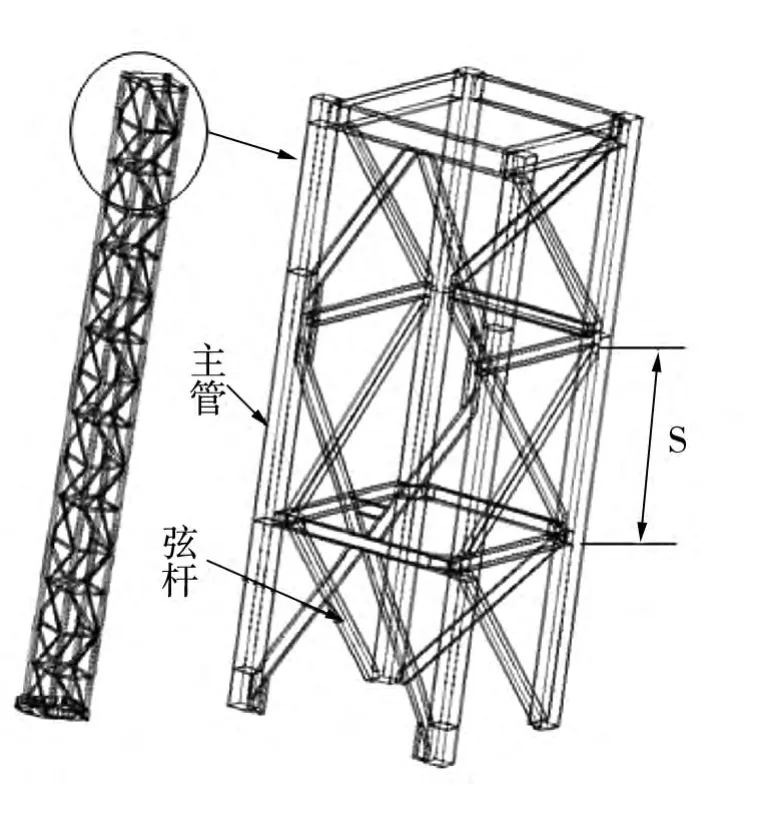
图2 垂直臂结构示意图

图3 垂直臂主管截示意图
根据垂直臂的结构特点及主管截面形状,选取的主要参数有:主管管材壁厚T_1、弦杆管材壁厚T_2、主管管材截面长L、主管管材截面宽W、档距S。垂直臂建模需要的其余参数根据与主要参数之间的函数关系确定。该桁架式桥梁检测车的伸缩臂、基本臂、二回转及连接架等部件所需的建模参数按照与垂直臂类似的原则选取。
2.2 单元类型及网格划分
某桁架式桥梁检测车的伸缩臂、基本臂主要是以不同截面形状的方管焊接而成,为减小模型规模选用beam188单元建立。垂直臂、二回转、连接架均采用solid186单元建立,二回转与基本臂联接的油缸以及垂直臂的升降油缸采用link8单元模拟。垂直臂与滑块之间添加面面接触单元,接触单元采用conta174,目标单元采用targe170。
采用ANSYS软件提供的APDL语言,直接在ANSYS软件中建立整机的参数化有限元模型。有限元模型采用自底向上(点—线—面—体)的建模方法。网格划分采用映射网格划分方式,这样可以确保单元的质量,从而保证计算精度[4]。
2.3 材料属性
模拟时各构件都采用线弹性材料模型,各部件的材料属性如表1所示。

表1 各部件材料属性列表
2.4 模型简化方案
垂直臂与滑块之间的滑动副通过施加面-面接触单元来模拟,并且假定接触面润滑良好无摩擦力作用。由于滑块材料相对垂直臂材料“较软”将滑块设为接触面,将垂直臂设为目标面。
采用穿轴法即把位于轴中心线上的节点用梁单元连接来模拟轴相对于轴孔的转动,避免直接计算轴和轴套接触问题,即实现了转动副的功能,又可显著提高整体模型的计算效率[4]。
垂直臂与二回转通过回转支撑连接,两者之间可以相对转动。采用重叠圆柱法(即建立两个空间重叠的圆柱体,两个圆柱体只共用轴线上的节点)来实现模拟。
2.5 模拟工况
选择需要分析的三种典型工况为:工况一,二回转转过0°即工作平台与桥梁走向平行,伸缩臂未伸出;工况二,二回转转过60°,伸缩臂全伸;工况三,二回转转过90°即与桥梁走向垂直,伸缩臂全伸。三种典型工况的有限元模型如图4所示。

图4 三种典型工况有限元模型
3 约束及加载
本次有限元分析选取了伸缩臂、基本臂、二回转、垂直臂、连接架等五部分为研究对象,而这五部分通过连接架上的四根销轴与转台相连接。因此,约束连接架上四根销轴,轴心节点UX、UY、UZ三个方向自由度。如图5所示。
桥梁检测车在工作状态时,除了主要承受本身的重力、额定载荷作用以外,还有要受到冲击载荷以及与工作环境相关的风载荷、温度载荷等的影响。假定桥梁检测车在理想条件下工作,忽略环境及冲击载荷的影响。考虑自重载荷的作用并且在基本臂和伸缩臂上施加800kg的均布载荷。加载方式如图6所示。
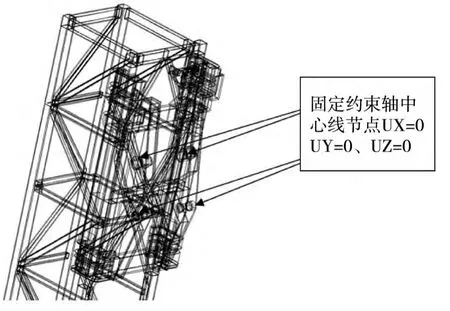
图5 模型约束方式示意图

图6 模型加载示意图
4 计算结果
对有限元模型约束加载后,用ANSYS求解器进行计算,通过通用后处理器可以得到某桁架式桥梁检测车垂直臂的强度和变形计算结果。因为垂直臂材料为型钢Q460,其屈服极限σb=460MPa,强度安全系数取2.75,则臂体材料许用应力[σb]=167MPa。计算结果如下所示:
(1)当主管与弦杆厚度均为4mm,档距为800mm时,三种工况下的应力如图7所示,变形量如图8所示。
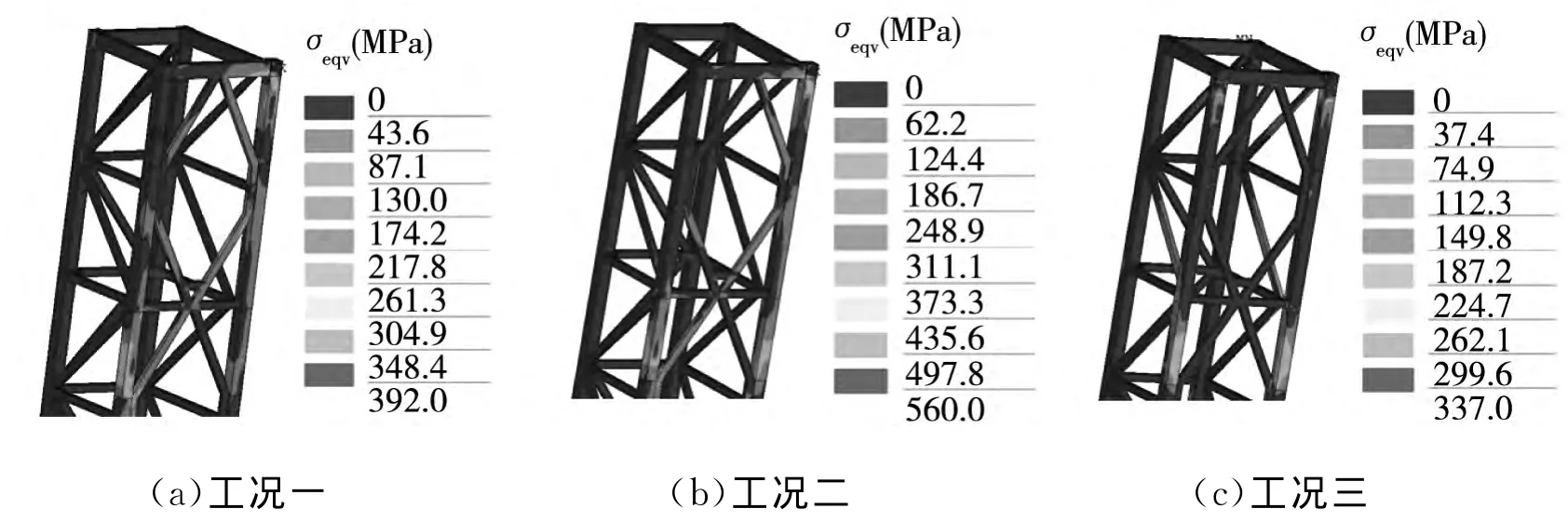
图7 档距为800mm三种典型工况下的应力云图
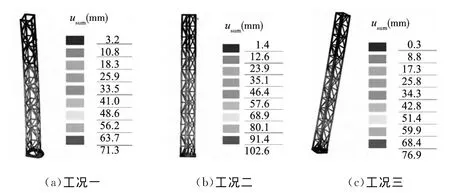
图8 档距为800mm三种典型工况下的位移云图
三种工况下的最大应力值以及变形量如表2所示。

表2 各工况下的最大应力及变形量
通过对三种典型工况的应力分析,可以看出在工况二时,垂直臂上的应力取到最大值,在此工况下垂直臂与滑块接触处有较大区域的应力超过材料的屈服极限,显然不能满足正常工作条件。对此,必须对垂直臂的结构做出相应的改变,使其能够满足强度及刚度条件。
(2)将主管厚度变为5.6mm,弦杆厚度为4mm,档距为800mm,应力如图9所示,变形量如图10所示。仅给出工况二下的结果。

图9 主管臂厚为5.6mm工况二应力云图
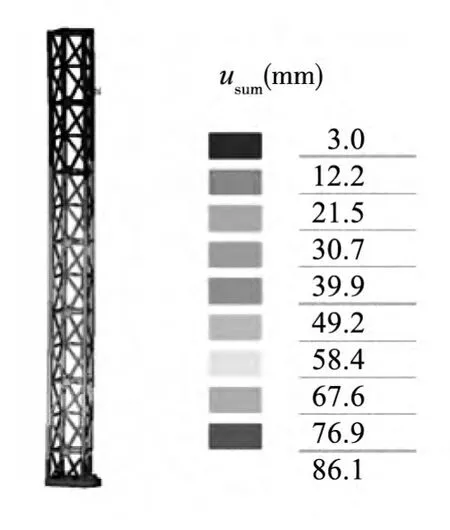
图10 主管臂厚为5.6mm工况二位移云图
将主管臂厚改为5.6mm之后最大应力为460MPa,最大变形量为86mm。应力值减了17.9%,刚度提高了16.2%,垂直臂的质量增加了6.6%变为1354.5kg。
(3)当主管弦杆厚度为4mm,档距分别为700mm、600mm的情况下进行分析,应力如图11所示,变形量如图12所示。仅给出工况二下的结果。
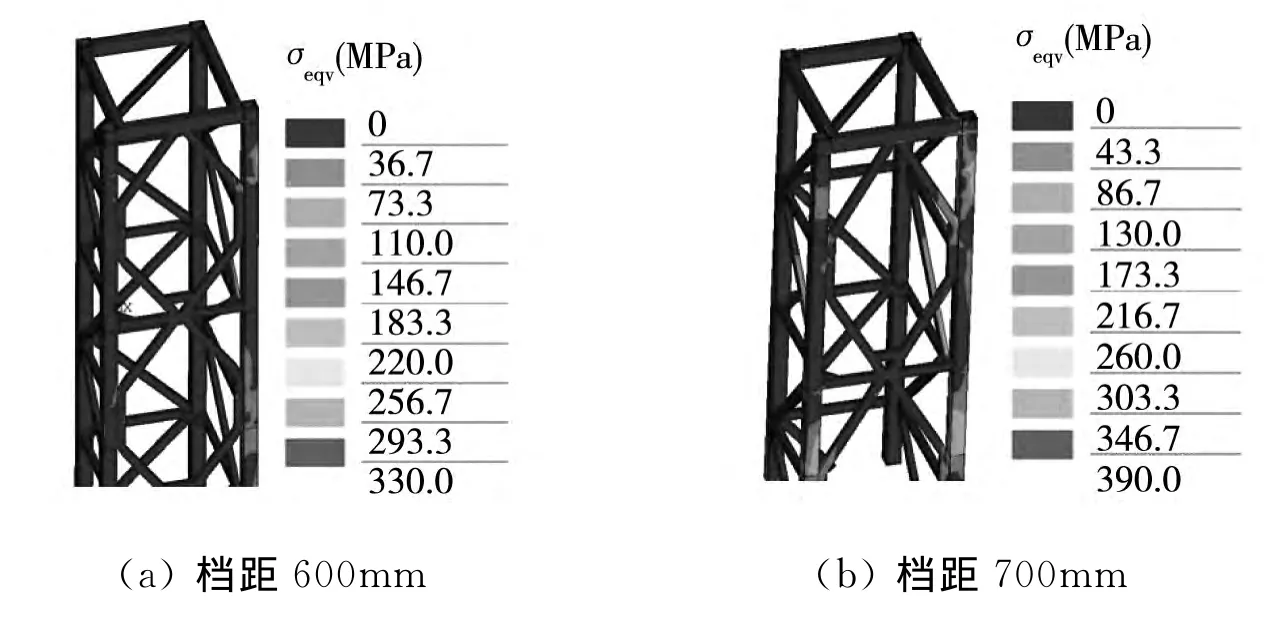
图11 不同档距下的应力云图
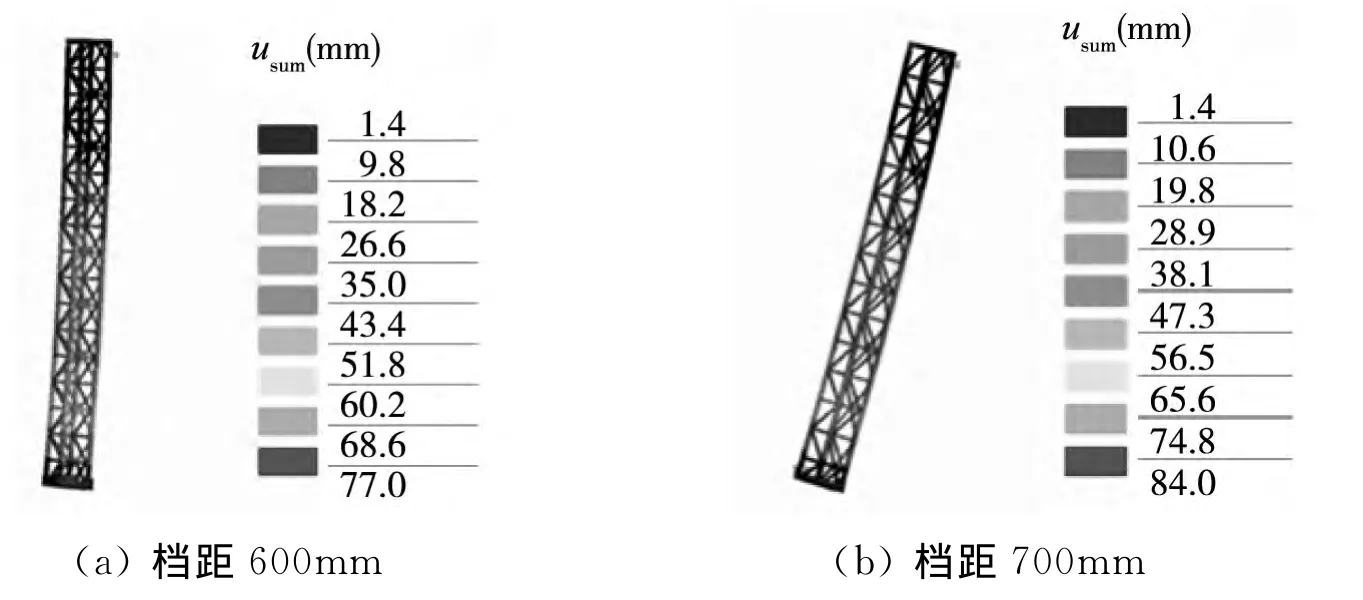
图12 不同档距下的位移云图
不同档距档距下的最大应力值以及变形量如表3所示。

表3 不同档距下的最大应力及变形量
通过对计算结果的分析可以看出,和档距为800mm的原始设计相比,当档距为600mm时,应力减小了41%,刚度提高了24.5%,质量增加了5.2%;当档距为700mm时,应力减小了30%,刚度提高了18.1%,质量增加了1.9%。综合以上分析结果,选择档距为700mm方案作为最终设计方案。
5 结论
(1)利用ANSYS中APDL语言建立了垂直臂参数化有限元模型,并且选取伸缩臂、基本臂、二回转、垂直臂、连接架为整体进行分析,保证了垂直臂的模拟模型与真实工作条件相符合。
(2)采用面面接触来模拟垂直臂与滑块间的滑动副,准确计算了垂直臂和滑块的应力和变形状况。
(3)工况二时即伸缩臂全伸、二回转转过60°时垂直臂应力和变形都最大,此工况为最危险工况。
(4)方管厚度一定的条件下减小档距可以使垂直臂的强度、刚度得到显著提高。减小档距比增加主管厚度更有利于垂直臂机械性能的提高。
[1]龚栋梁.国内外桥梁检测车发展概述.商用汽车[J].2009,(6):100-102.
[2]和丽梅.桁架式桥梁检测车结构分析与优化设计[D].西安:长安大学,2008.
[3]程亮.桥梁检测车上车结构有限元分析与优化[D].吉林:吉林大学,2011.
[4]陈志伟,温玉霜,刘庆娟,等.车厢可卸式垃圾车拉臂钩工作装置的高效整体结构分析[J].2013,28(4):66-70.
