数值优化技术在图像分析中的应用
2014-07-08李一华王涛
李一华,王涛
(1.海军驻株洲地区某军代表室,湖南 株洲 412002;2.中国航空动力机械研究所,湖南 株洲 412002)
0 引 言
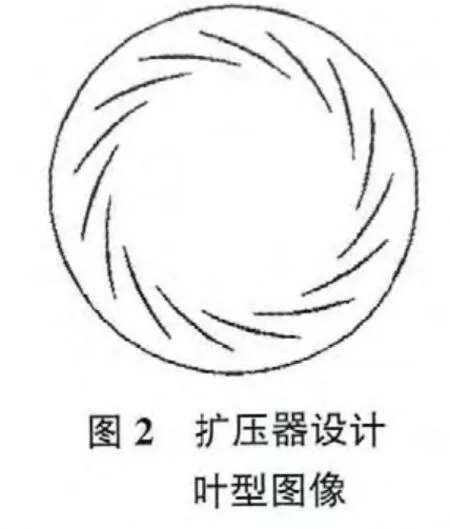
CT 成像技术是现代工业的一种重要检测手段,主要用于零件无损探伤和可达性较差的零件内部型面检测,有时也应用于比较两种类似图像的相似程度。图像的相似性在人的视觉上表现为图像信息的颜色、轮廓、相对大小、位置、旋转角度等的相似性,但这些信息都只是人的直观感受,不同的人对于这些信息的敏感性不同,其获取信息的程度便也不相同,因此采用数据优化方法使两幅类似图像重合最好时,观察其图像像素的相差是有必要的。以前的CT 图像都是投射在胶片上,观测者只能够给出一个直觉的观测结果,无法完成更为精确的对比性分析。为证实某涡轴发动机离心压气机径向扩压器叶片的加工与设计的符合性,在三座标测量仪等常规计量手段不可达的情况下,通过对该径向扩压器叶片进行CT 扫描,得到其叶型扫描图像(图1 所示),运用数值优化原理对该扫描图像进行变换(包括图像的平移和旋转),得出和其原始设计叶型图像(图2 所示)重合最好时的差异图,进而判定零件的加工符合性。

1 图像分析前处理
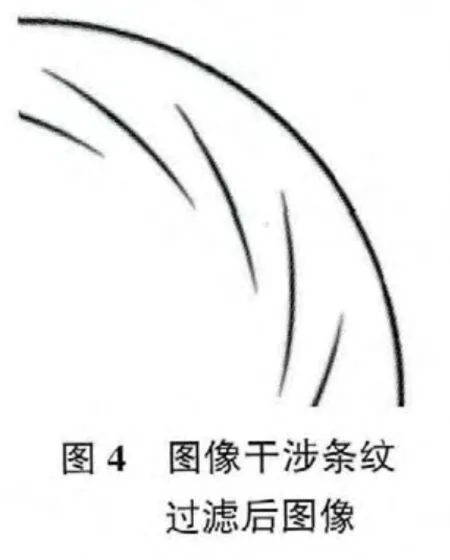
由于测试仪器和数据采集系统本身的精度以及测试零件对X 射线的反射和衍射行为,使所获得的扫描图像存在条纹状干涉曲线,图3 为扩压器叶型CT 扫描图像在增强对比度后的放大图。在数据处理过程中,这些干涉条纹无疑会影响数据分析时的精度和准确度,因此须对图像中的干涉条纹进行滤波处理,图4 为图像滤波后的图像。

2 图像处理模型
图像的基本组成单元是像素,其在计算机内的存储方式是记录每一个像素点的RGB 值(红绿蓝三原色数值),因而形成了一种三维数组形式的图形数据,在图像的分析中,所处理的对象也必然是针对这个RGB 图像数组来进行的。
为了方便两个图像数组的处理,使其行数和列数值相等,形成An×n,Bn×n矩阵,其中矩阵的每一个元素为一个包含3 个RGB 数据的向量。
图形位移量变量包括:Δx、Δy、Δθ。
对图像矩阵Bn×n进行变换有:

式中:Δx(Bn×n)表示对矩阵Bn×n内信息元素在矩阵内的位置进行横坐标方向的平移x 距离的变换,x=…,-1,0,1,2,…,其数学处理上就是对矩阵内信息元素的列向量进行位置调换。
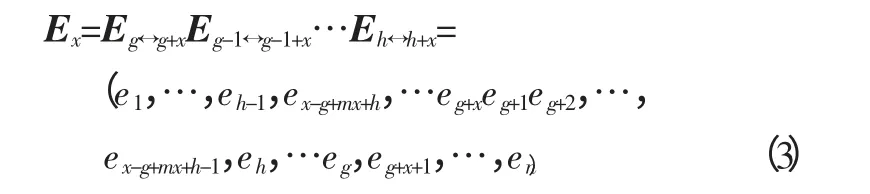
令Bn×n=(b1,…bh,…bg,…bn,)其中h 和g 表示图像信息在图像矩阵中所占列向量左右极限位置;令E=(e1,e2,…,en)表示单位矩阵;令Ei↔i+m表示单位矩阵E 的第i 列和第i+m 列交换位置,则

则图像矩阵Bn×n的图像信息列向量沿横坐标的变换矩阵Ex为:
当x≥0 时,信息图像向左平移,
当x<0 时,信息图像向右平移,
即沿横坐标平移的方向不同,其前后信息列向量的变换次序相反。则对图像矩阵x 轴的平移运算可表示为:
式(1)中,Δy(Bn×n)表示对矩阵Bn×n内信息元素在矩阵内的位置进行纵坐标方向的平移变换,y=…,-1,0,1,2,…,对矩阵内信息元素的行向量进行位置变换。
令Bn×n=(a1,…ak,…al,…an)T,其中k 和l 表示图像信息在图像矩阵中所占行向量上下极限位置;
令Ej↔j+m表示单位矩阵E 的第j 行和第j+m 行交换位置,则Ej↔j+m=(e1,…,ej-1,ej+m,…,ej+m-1ej,ej+m+1,…en)。(6)
则图像矩阵Bn×n的图像信息列向量沿纵坐标的变换矩阵Ey为:
当y≥0 时,信息图像向下平移,

当y<0 时,信息图像向上平移,

即沿纵坐标平移方向不同,其前后信息行向量的变换次序相反。
则对图像矩阵沿纵坐标的平移运算可表示为:

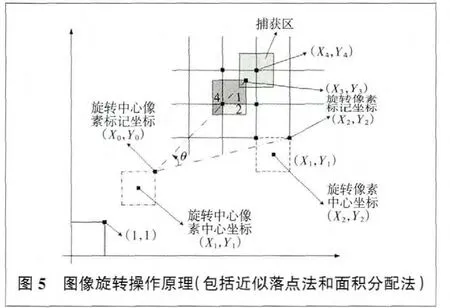
式(1)中,Δθ(Bn×n)表示对矩阵Bn×n内的信息元素在矩阵内的位置进行旋转变换,即对矩阵内信息元素的像素进行旋转变动,从而实现图像信息的整体旋转。
令图像旋转中心点像素坐标为(X0,Y0),则中心点像素几何中心坐标为:(X1,Y1)=(X0-1/2,Y0-1/2)。
令任意旋转点的像素坐标为(X2,Y2),令旋转点的像素坐标和图像旋转中心点像素坐标的最大距离为t 个像素。则X2-X0∈(-n,n),Y2-Y0∈(-m,m),n,m 分别表示两像素坐标纵坐标和横坐标的相对位置关系,并且满足方程n2+m2≤t2。
令旋转点的像素面向零取整后的坐标为:(X5,Y5)=(X4-1,Y4-1)。
当旋转角度为θ 时,(X2,Y2)的新坐标位置为(X3,Y3),

1)采用近似落点法来处理像素坐标位置

即当像素标记点的纵横坐标落于相对某像素标记坐标点为(X4±0.5,Y4±0.5)的范围之内时,即进入(X4,Y4)的捕获区,即可认为该旋转像素落点位于该处。
则新像素标志坐标为(X6,Y6)=(X5+1,Y5+1)+(X0,Y0)。
新坐标处RGB 像素值为C(X6,Y6)=B(X2,Y2)。 (11)
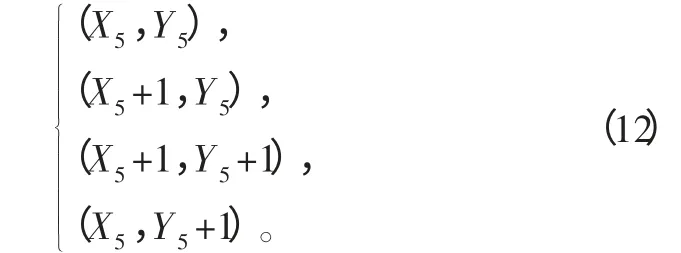
2)采用面积分配法来处理像素坐标位置
作为计算机中的可识别图像,需对其变换坐标取整。按照面积的大小来分配像素值,如图5 阴影部分所示。
当旋转后像素体内包容一个像素标志点时,则可分配到像素值的相邻位置的4 个像素坐标为:
像素值的分配比例分别为:
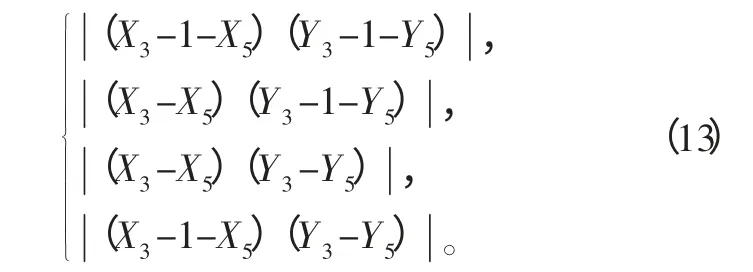
图6 中,第1 幅图为含有21×21 个像素点的图片,第2幅图像为用近似落点法旋转45°后得到的图像,很显然,图像中存在严重的失真问题,不能反映真实的物理形态。第3 幅图为采用面积分配法旋转45°后得到的图像,其失真度较小。
3 结果分析和评价
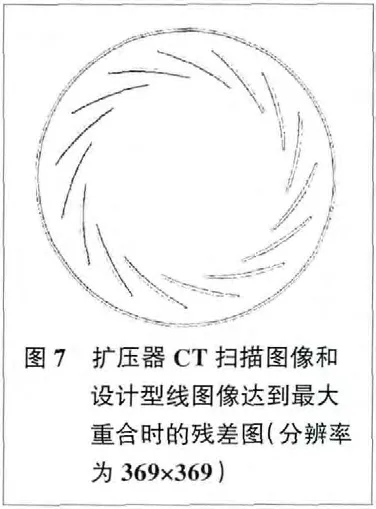
扩压器叶片型面的CT 扫描图像和设计叶型图像达到最大重合时的残差图如图7 所示,观察图7 可见,设计叶型图像和绝大部分扫描叶型图像的边缘基本重合,说明零件实物和设计具有较好的符合性,但个别扫描叶型图像的宽度和颜色深度存在一些区别,说明叶型在加工上存在一定的分散度。

4 结 语
对两张类似图像或者同一张图片中不同区域图像的分析比较,采用数值优化的方法可以很好地达到分析和比较的目的。另外,从以上数据处理和误差分析的结果看,对零件型面的分析精度除了和CT 扫描仪器自身精度相关,还和计算机数据采集系统以及计算机图像数据处理过程密切相关,算法的改进对提高分析精度有较大的影响。因此,从提高分析精度考虑,采用高精度的CT 扫描仪,增大计算机数据采集频率,提高图像分辨率,采用良好的图像处理算法特别是优化算法是非常重要的,但同时其处理的数据量也会加大。
[1] 王正林,刘明.精通MATLAB7[M].北京:电子工业出版社,2006.
[2] 薛嘉庆.最优化原理与方法[M].北京:冶金工业出版社,1983.
[3] 孙兆林.MATLAB6x 图像处理[M].北京:清华大学出版社,2002.
[4] 王兆华.计算机图像处理方法[M].北京:宇航出版社,1993.
[5] 甄成刚,韩璞,牛玉广.炉膛火焰图像处理技术及温度场重构[J].动力工程,2003,23(4):2548-2551.