基于热释电红外传感器的车辆和人员分类*
2014-07-07余振华李宝清袁晓兵
李 光,余振华,李宝清, 袁晓兵
(中国科学院 上海微系统与信息技术研究所 无线传感器网络与通信重点实验室,上海 200050)
基于热释电红外传感器的车辆和人员分类*
李 光,余振华,李宝清, 袁晓兵
(中国科学院 上海微系统与信息技术研究所 无线传感器网络与通信重点实验室,上海 200050)
设计了一种应用于野外环境中的热释电红外系统,并创新性地提出用单热释电红外传感器节点进行车辆和人员的分类。分类算法利用信号的幅度、信号的持续时间、信号一阶差分值的绝对值的最大值作为特征向量,利用支持向量机(SVM)进行目标分类。在10,20 m处分类准确率分别可以达到93.5 %,94.5 %,并且针对10,20 m的综合分类准确率可以达到92 %。该系统扩展了热释电传感器的应用范围和应用场景,所用分类方法对于其他同类传感器系统具有一定的借鉴意义。
目标分类;热释电;红外传感器车辆;支持向量机
0 引 言
热释电红外(PIR)传感器是根据热释电效应将目标辐射的红外信号转换为电信号的一类红外器件,因其具有隐蔽性强、功耗低、灵敏度高、可全天候工作等特点而广泛应用于安防系统、自动控制等领域。
在传统的应用中,热释电红外传感器一般应用于探测目标的有无、计数及判向等功能[1~3],随着工艺的进步和技术的发展,红外传感器的应用范围得到进一步的扩展。文献[4]通过用步进电机控制红外传感器的观测方向,实现了对目标的方位跟踪;文献[5,6]提出了利用模拟电路输出的目标信号的幅值和峰—峰值时间差来对目标信号进行定距;文献[7,8]将热释电红外传感器应用于人体身份识别和人体动作形态识别。综上可知,当前的大部分研究是将热释电传感器应用于室内环境中。
本文拟将热释电传感器系统应用于野外环境中,并在传统的探测、计数、判向等功能的基础上,提出一种利用热释电传感器进行车辆和人员分类的方法,这将大大扩展了热释电传感器的应用场景和应用范围。
1 系统工作原理
本文中所用的红外传感器系统的原理图如图1所示。当目标经过检测区域时,其辐射的红外光线经过红外透镜聚焦在敏感元上,敏感元将光信号转换为电信号,经过滤波、放大、抽样后送入单片机,单片机中红外检测识别程序进行目标检测分类后生成情报信息,情报信息经通信模块发送给后方的控制平台。
一般的热释电的敏感元分为单目、双目、四目等。双目的敏感元包含2个反向串联的热释电元件,用于消除环境中的背景噪声。当探测区域无目标时,背景辐射的红外光线同时射到2个敏感元上,产生幅度相等但极性相反的信号,输出信号为零,从而背景噪声被消除。当目标经过探测区域时,目标所处的位置不同,辐射的红外光线汇聚在敏感元上的位置不同,输出的电信号也会不同。如图2所示,当目标从左向右经过探测区域时,第一个热释电元首先被激发,而后是第二个热释电元被激发,从而产生图3(a)中所示的电压信号输出。当目标从右向左经过敏感元时,作用过程相反,产生极性相反的信号,如图3中(b)所示。这也是热释电传感器系统进行目标测向的原理。
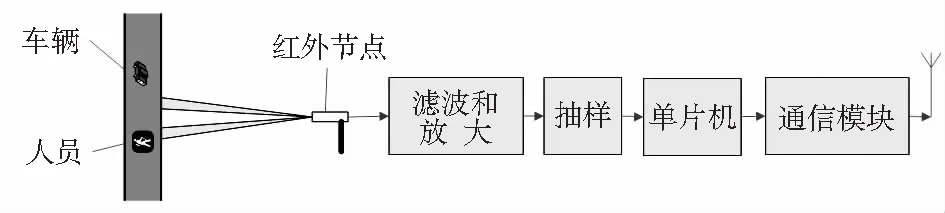
图1 热释电红外系统组成Fig 1 Compsition of PIR system
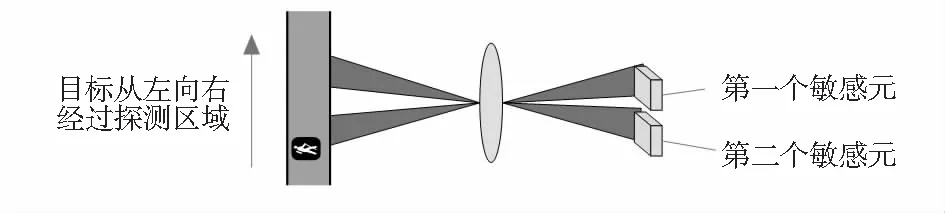
图2 目标经过探测区域示意图Fig 2 Schematic diagram of target passing through detection zone
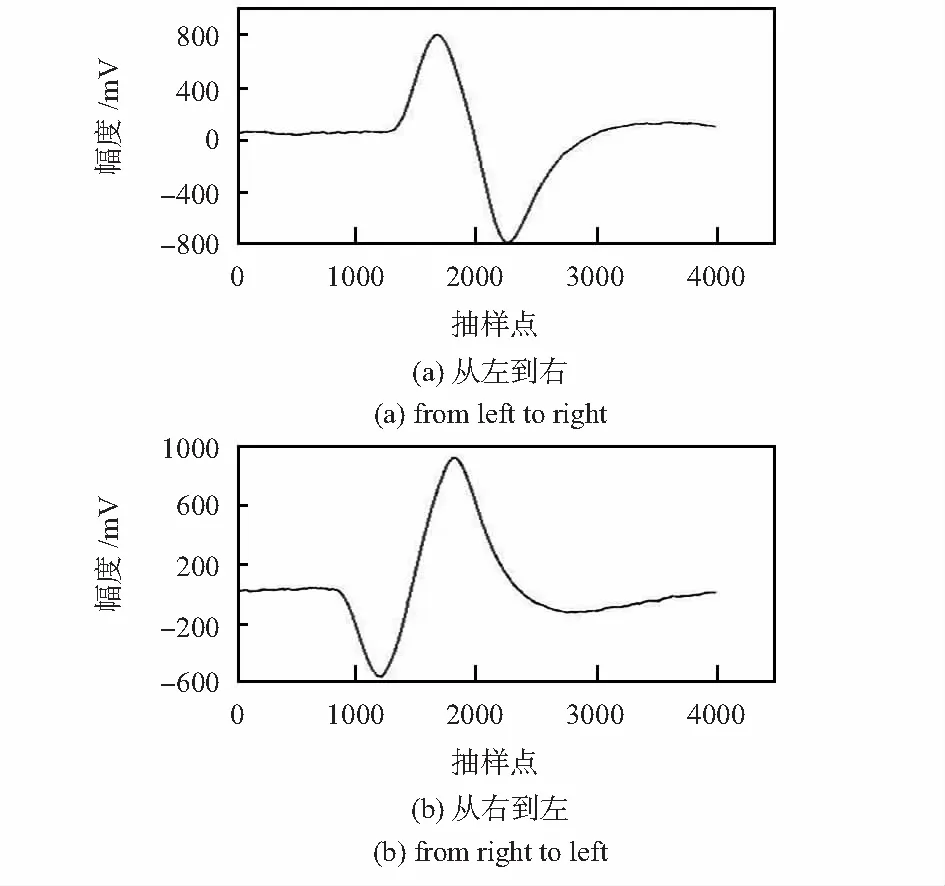
图3 目标从不同方向经过探测区域波形图Fig 3 Waveform when target passing through detection zone from different directions
2 目标分类原理
热释电红外传感器内部的敏感元件是一种具有极化现象的“铁电体”,这种铁电体的极化强度会随温度的变化而变化。当红外光照射到已经极化的铁电体薄片表面时,引起薄片温度升高,使其极化强度降低,表面电荷减少,这相当于释放了一部分电荷,也就是所谓的热释电效应。敏感元输出的电流的大小[5]满足公式(1)
I=APdT/dt.
(1)
其中,A为热释电敏感元的面积,P为热释电系数,T为热释电材料的温度。当选型确定时,热释电系数也确定,敏感元输出电流的大小主要与辐射到敏感元上的面积和目标辐射能力有关。实际上,热释电信号的输出由以下几个方面来确定[9]:
1)目标距离传感器的远近;
2)目标的辐射能力和辐射到敏感元上的面积;
3)目标移动的速度;
4)光学系统,包括光学镜头的面积和光学镜头的透过率等。
信号的幅度和持续时间是热释电红外信号主要的时域特征。文献[10]中,已经利用信号的持续时间和信号幅度成功地将目标和传感器的距离分成3个区域。因此,本文分析了信号的幅度和持续时间作为车辆和人员分类特征的可行性。
当传感器布设完毕后,目标距离传感器的距离也就基本确定,因此,对输出信号产生影响的因素主要是目标的辐射能力和目标的移动速度。在同样的距离下,车辆温度更高,辐射能力更强,因此,车辆信号的幅度相对于人员信号来说更大。本文中红外传感器系统是应用在野外环境中,车辆目标主要为履带车和轮式卡车等车体较长的目标,相对于人体目标来说车辆目标的信号持续时间会更长。在图4中,车辆信号的幅度明显比人体信号的幅度要大得多,信号持续时间也更长,这验证了以上论述。因此,本文通过测量目标信号的幅度和持续时间来对目标进行分类。
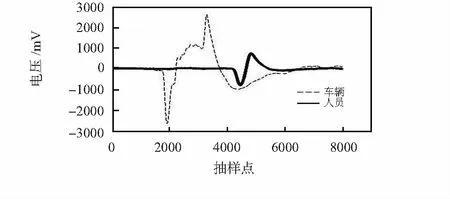
图4 车辆和人员信号Fig 4 Signal of vehicles and personnel
信号的幅度会受环境因素的影响,而信号的持续时间会受所采用的检测算法的影响。如果只用信号幅度和信号的持续时间2个指标对目标分类,分类准确率低、效果不稳定。文献[9]中指出,目标的移动速度和目标形成信号的频率之间存在如下关系

(2)
式中f为目标形成信号的频率,fb为光学系统的焦距,vb为目标移动的速度,S为敏感元的面积,L为目标和传感器的距离。目标移动的速度越大,目标形成的信号的频率越高。车辆与人体目标的速度差异较大,其频域信息也存在较大的差异,因此,可以利用频率的差异来对车辆和人员进行分类。但是,传感器单片机的计算能力和内存等硬件资源有限,令部署在野外的传感器系统对信号做FFT,无论是计算能力还是功耗对都是一个不小的挑战。信号的频率信息的差异在时域中表现为信号的差分,频域中高频成份越多,时域中信号的一阶差分值越大。信号的一阶差分体现了目标的速度信息,而车辆和人员的速度差别较大,因此,可以选用信号时域的差分值来对目标进行分类。为了进一步突出这种差异,本文中选择目标信号的差分值的绝对值的最大值Dmax作为目标分类的另一个指标,且Dmax为
Dmax=|xi-xi-1|max.
(3)
其中,i∈(1,2,3,…,N),xi为信号的幅度,N为信号处理选取的一个信号子段,本文中每100个点为一个子段,即N=100。
综上,可以依据信号的幅度、信号的持续时间、信号一阶差分值的绝对值的最大值作为特征向量对车辆和人员信号进行分类。本文定义进行目标分类的特征矢量表示为
V=[Samp,Ls,Dmax].
(4)
其中,Samp为目标信号的幅度,Ls为信号的持续时间,Dmax为信号一阶差分值的绝对值的最大值。
3 实验过程与结果
本文设计了一个热释电红外传感器系统来验证以上的分析。图5(a)为所选择的敏感元—LHI968,该敏感元为PerkinElmer公司生产的一种双目敏感元,图5(b)为本文作者设计的传感器节点。单片机选择的是MSP430F5438A,这种芯片具有非常优良的低功耗能力,最低的工作电流,可以达到0.1 μA,非常适合于部署在野外环境中的传感器节点。此外,它还有12 bit的ADC,256 kB的Flash和一个16 kB的RAM等资源,这些资源能够满足的应用需求。为了更好地保留信号的细节信息,在系统中,采用1 kHz的采样频率。
图5 敏感元和探测节点Fig 5 Sensitive component and detecting node
在实验中,让车辆和人体目标分别在距离传感器10,20 m位置处来对目标进行分类。人员信号的速度保持在1 m/s,车辆的目标的速度保持在10 m/s,该速度和在野外环境中车辆行驶速度相近。为了更好地验证算法的普适性,本文选择了不同的车辆和人员信号来做目标。传感器系统中的单片机会对采集的信号进行目标检测、计数、判向,然后提取出分类所需要的特征矢量。单片机将计数、判向结果和特征矢量经通信模块发送给后方的控制台,控制台的PC会对特征矢量进行目标分类,生成综合的情报信息。
选取10,20 m处各100个人员信号的数据和100个车辆信号的数据来提取其特征矢量并进行分类实验。为了更好地对目标进行分类,在PC上使用支持向量机(SVM)分类器对目标进行分类。其中随机地选取50 %的数据作为训练数据,另50%数据作为测试数据。表1为10,20 m处获得的20个人体和车辆的特征矢量数据的平均值。
表1 车辆和人员信号特征矢量Tab 1 Feature vector of vehicles and personnel signal
从表1中可以看出:人员和车辆目标的特征矢量差别很明显。对于最大幅值Samp,人员信号在10,20 m处均在1 000以下,而车辆目标基本均在2 000以上。20 m处目标信号幅度比10 m处信号幅度大的主要原因是因为10 m处目标在探测范围小,当目标经过探测范围同时覆盖2个敏感元的区域会更大,而2个敏感元是反向串联的,当目标同时覆盖2个敏感元时信号会被削弱。由于轮式车、履带车等车体较长,即使考虑到速度差异的影响,其信号的持续时间Ls仍明显比人体信号持续时间要长。不同目标类型的信号差分绝对值的最大值Dmax差别较大,但是人员信号在不同距离处差异很小。从表1中可以得出结论:利用信号的幅度、信号的持续时间、信号一阶差分值的绝对值的最大值作为特征向量不仅可以对同等距离处的车辆和人员信号进行分类,而且可以对不同距离处的车辆和人员进行分类。
选取10,20 m处各100个人员信号的数据和100个车辆信号的数据提取特征矢量,随机选取各组中的50个数据作为训练数据,剩余的数据作为测试数据。为了测试不同距离处的分类效果,将10,20 m处信号组合到一块,然后随机选取100个数据作为训练数据,剩余的作为测试数据。利用SVM对目标进行分类的结果如表2、表3、表4所示,从表中可以看出:1)在10 m处人员和车辆信号的分类率分别达到了92 %和95 %,平均分辨率为93.5 %。2)在20 m处人员和车辆信号的分类率达到了95 %和94 %,平均分辨率为94.5 %。3)不同距离处的人员和车辆信号的分辨率分别为91 %和93 %,平均分辨率为92 %。
从以上分类结果可以得出利用信号的幅度、信号的持续时间、信号一阶差分值的绝对值的最大值作为特征向量可以有效地对人员和车辆信号进行分类。
表2 10 m处分类结果Tab 2 Classification results at 10m
表3 20 m处分类结果Tab 3 Classification results at 20 m
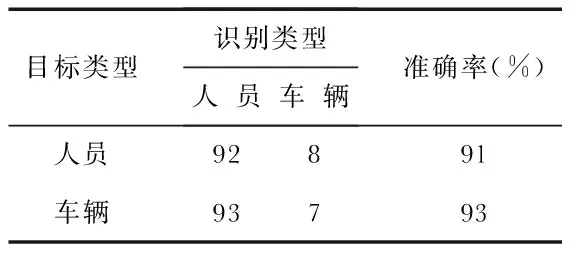
表4 不同距离处综合分类结果Tab 4 Comprehensive classification results at different distances
4 结 论
本文利用单热释电传感器节点在野外环境中进行目标计数、判向、识别,大大扩展了热释电传感器的应用环境和应用范围。在充分分析热释电传感器工作特性的基础上,本文提出了利用信号的幅度、信号的持续时间、信号一阶差分值的绝对值的最大值作为特征向量对车辆和人员信号进行分类。该分类方法对距离传感器10,20 m的车辆和人员目标的平均分类准确率分别可以达到93.5 %和94.5 %,对10,20 m的综合分类准确率也可以达到92 %。
[1] Piero Zappi,Elisabetta Farella,Luca Benini.Tracking motion direction and distance with pyroelectric IR sensors[J].IEEE Sensors Journal,2008,10:1486-1494.
[2] Kastek M,Sosnowski T,Piatkowski T.Passive infrared detector used for detection of very slowly moving of crawling people[J].Opto-Electronics Review,2008,16(3):328-335.
[3] Hashimoto K,Morinaka K,Yoshiike N,et al.People count system using multi-sensing application[C]∥Intemational Conference on Solid-state Sensors and Actuators,1997:1291-1294.
[4] Vicot S.Test-bed design for target detection and tracking using WS[D].Chennai:Anna University,2006.
[5] 孙 乔,杨 卫,于海洋,等.动态下红外热释电传感器的目标定位方法[J].红外与激光工程,2012,41(9):2288-2292.
[6] 杨 卫,孙 乔,李 波,等.基于热释电红外传感技术测距的时间差法研究[J].传感器与微系统,2012,32(4):37-40.
[7] 冯 莉,明 东,徐 瑞,等.热释电红外传感器在生物特征识别领域中的研究进展[J].现代仪器,2011,17(3):10-14.
[8] 杨 靖.一种热释电红外人体动作形态传感器的研究[D].北京:清华大学,2010.
[9] 王林泓.热释电红外信号特征分析及人体识别方法研究[D].重庆:重庆大学,2010.
[10] Piero Zappi,Elisabetta Farella,Luca Benini.Pyroelectric infrared sensors-based distance estimation[C]∥IEEE Sensors 2008 Conference,2008:716-719.
Classification of vehicle and personnel based on pyroelectric infrared sensor*
LI Guang, YU Zhen-hua, LI Bao-qing, YUAN Xiao-bing
(Key Laboratory of Wireless Sensor Networks & Communication,Shanghai Institute of Micro-system and Information Technology,Chinese Academic of Sciences,Shanghai 200050,China)
Design a pyroelectric IR(PIR)system applied in outdoor environment,and innovatively propose a method using single PIR node to classify vehicles and personnel.The classification algorithm uses signal amplitude,duration of signal,the maximum value of absolute value of the first order difference as feature vector, and use support vector machine(SVM)for target classification.Classifying accuracy is 93.5 % and 94.5 % when PIR detectors are deployed 10 m and 20 m away from the area of interest,and the compositive classification accuracy is 92 %.The system extends the application range and scenarios of pyroelectric sensor and the proposed classification method has a certain reference meaning for other similar sensor systems.
target classification; pyroelectric; infrared sensor; vehicle; SVM
10.13873/J.1000—9787(2014)10—0028—04
2014—03—05
微系统技术国防科技重点实验室基金资助项目(9140C18010213ZK34001)
TN 219
A
1000—9787(2014)10—0028—04
李 光(1989-),男,山东聊城人,硕士研究生,主要从事红外传感器系统方面的研究工作。
