一种电热式MEMS微镜多自由度模型解析方法
2014-07-07徐大诚谢会开
章 皓,徐大诚,陈 巧,谢会开
(1.苏州大学 电子信息学院,江苏 苏州 215000;2.无锡微奥科技有限公司,江苏 无锡 214000;3.美国佛罗里达大学 电气与计算机工程系,美国 佛罗里达州 32306)
一种电热式MEMS微镜多自由度模型解析方法
章 皓1,2,徐大诚1,陈 巧2,谢会开3
(1.苏州大学 电子信息学院,江苏 苏州 215000;2.无锡微奥科技有限公司,江苏 无锡 214000;3.美国佛罗里达大学 电气与计算机工程系,美国 佛罗里达州 32306)
结合微镜驱动器结构,通过引入热导和弹簧刚体模型分析了多驱动器间热传导和相互作用力导致的形变原因,并建立了多自由度微镜的数学模型。仿真与实验数据对比说明:建立的模型与实验结果具有较好的一致性,能够预测4个驱动器的输入响应特性。
MEMS微镜;数学建模;驱动器
0 引 言
MEMS微镜是一种利用微驱动器控制镜面位移或转动,从而实现调整入射光空间分布的调制器,主要应用在光通信、显示和投影成像等技术领域[1]。其中,微驱动器的研制是关键,相比通常的电磁式、静电式和压电式驱动,电热式Bimorph驱动器利用材料应力差异能够大幅提升位移并且降低功耗[1,2],因而,电热结构普遍应用于微镜设计中。对于此类器件,其运动是驱动器电—热—机械三者能量之间转换过程[3],建立相应模型对研究微镜的静瞬态特性有重要意义。
电热驱动器利用热形变原理,针对不同的加热方式,如微桥加热和自由端加热,通常采用电热模型[4,5]。其中,等效电路集总元件模型用于电阻加热元件结构,对加热器温度分布不均匀和非零温度系数电阻率引起的电气输入与电热输出之间复杂关系的问题,采用有限元分析法。将加热器分解为有限数量的电热耦合网络元素,每个元素包含温度电压节点、等效热功率源和热电阻器[6];再采用仿真软件SPICE处理分析模型数据。此方法精度高,但建模时间长且无法对器件进行系统级仿真。文献[6,7]针对单个驱动器建立电热模型,但是多自由度MEMS微镜存在多驱动结构,没有考虑驱动器之间存在的耦合影响。
本文基于电热式Bimorph驱动器结构,结合热阻模型对多驱动器间的热传导加以分析,给出热应力形变的具体表示,再通过弹簧刚体模型求解驱动器间相互作用力引起的形变关系,进而利用线性叠加原理建立了一种热电式双S形Bimorph二维微镜模型。同时将模型仿真与实验数据比较,对比结果验证了此方法的合理性。
1 双S形Bimorph微镜结构
电热式二维微镜的结构如图1所示,主要包括:Al镜面、Si衬底和4个驱动器。驱动器连接衬底与镜面,起支撑和控制镜面转动作用。基于折叠式双S形(FDS)结构设计的驱动器由3层材料组成:Al,SiO2和Pt。电压输入时,Pt层作为加热电阻器产生热量,并传导到Al和SiO2层。由于材料热膨胀系数的差异,Al层产生的热变形远大于SiO2层,因此,驱动器产生面外的垂直运动。同时,该结构利用Al/ SiO2和SiO2/Al正反Bimorph层补偿设计[8],使驱动器只产生垂直位移而不存在横向偏移。由输入电压可以控制微镜的二维转动,电压与镜面偏角呈线性关系[9]。
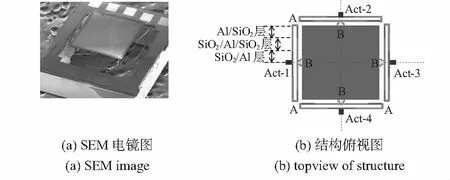
图1 微镜示意图Fig 1 Schematic view of micro-mirror
2 微镜的静态模型
2.1 角度与温度
驱动器是由4个对称S形结构组成,如图2所示。驱动器的每段S结构由3部分组成:Al/ SiO2层、SiO2/Al/SiO2层和SiO2/Al层。
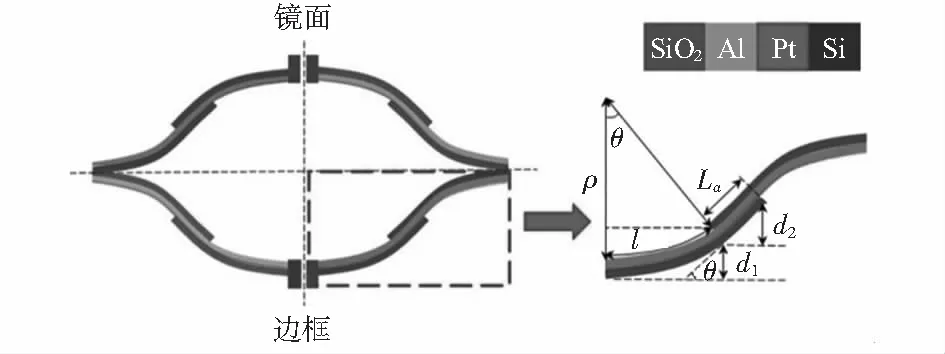
图2 驱动器截面图Fig 2 Sectional view of actuator
因为微镜的转角是由驱动器的变化量决定的,由图2推导Al/SiO2层和SiO2/Al/SiO2层的位移变化量

(1)

(2)
其中,Δd1为Al/SiO2层的位移变化量,l为弧长,ρ为曲率半径,Δθ为角弧度变化量,d2,la分别为SiO2/Al/SiO2层的位移量和长度。由于Al/SiO2层和SiO2/Al层对称,所以,它们的位移变化相同。驱动器的高度与角度变化量为
Δd=2(2Δd1+Δd2)

(3)
微镜加电后,驱动器温度上升引起应力失配导致变形。假设驱动器上温度等效为均匀分布[8],角度变化由驱动器上的温度变化表示
(4)
将式(4)带入式(3)可以得驱动器的高度变化与温度变化之间的关系

(5)
2.2 热阻模型
驱动器两端由SiO2热阻块连接到镜面与衬底,在热传递作用下部分热量会传到衬底与镜面,导致热量损失。由于热传递有3种形式:热传导、热对流和热辐射。其中,热传导对驱动器温度变化起主导作用[10]。因此,只考虑热传导因素,温度与输入电压的关系可表示为
(6)
式中P为输入功率,RT为驱动器的联合热阻,U为输入电压,Re(T)为驱动器在温度T下的电阻值。微镜的热传导模型如图3所示,单个驱动器加电后,部分热量通过热阻RT1和RT2分别传递到衬底和镜面,而镜面上的热量经其余驱动器再传递到衬底。
图3 微镜热阻模型Fig 3 Thermal resistance model of micro-mirror
假设驱动器1的输入功率为P,这部分功率分别流向衬底和镜面(P1和P2)。相对驱动器1,其余3个驱动器的热阻并联,由温度功率关系可得热量向两边传递表达式
ΔT=RT1P1,
(7)

(8)

(9)
与式(6)对比发现驱动器的联合热阻如下
(10)
对于单个驱动器整体热阻分为四部分:连接衬底热阻RT1、连接镜面热阻RT2、驱动器自身热阻RT0和镜面热阻(如图3所示)。其中,镜面由于是Al料,热阻相对其他3部分可以忽略。连接镜面、衬底的SiO2的热阻相等(RT1=RT2)。驱动器整体热阻为
(11)

(12)

Re(T)=R0(1+γΔT).
(13)
其中,γ为电阻温度系数,R0为初始阻值,ΔT为温度变化。电压输入时,功率会引起温度增加,从而导致驱动器电阻上升;在稳定输入下,电阻上升必然引起温度变化减小,导致电阻下降,同时电阻下降会引起温度变化增加。如此形成了温度与电阻之间的负反馈,把这个过程分解成n个部分,计算如下
Rn-1=R0(1+γΔTn-1),
(14)

(15)


(16)
综上所述,由式(5)、式(16)可以得到单个驱动器高度变化与输入电压的关系
(17)
2.3 弹簧刚体模型
微镜依靠驱动器受热形变转动,系统可以简化成弹簧刚体模型,如图4所示。镜面位置取决于4个弹簧的受力形变程度,把形变认为外力F对弹簧的作用。
图4 微镜模型Fig 4 Micro-mirror model
驱动器1(Act-1)加电时,A点即受到压力F,镜面绕C点产生转动。以驱动器1为研究对象,受力分析如图5(a)所示。根据力平衡可得
F=Fk+Fx=kΔx+Fx,
(18)


(19)
由式(18)、式(19)可得
F=1.5kΔx.
(20)
图5 微镜受力示意图Fig 5 Force diagram of micro-mirror
当驱动器受力而无相邻驱动器影响时,使镜面偏转θ,驱动器受到的压力为
F1=kΔx.
(21)
比较式(20)、式(21)发现F=1.5F1,即镜面达到相同偏转角度,存在相邻驱动器结构的作用力是无相邻驱动器结构的1.5倍。因此,由胡可定理可知,在相同作用力下,微镜系统中驱动器的变形量应是单个驱动器的2/3倍。
驱动器的形变主要受到2个因素的影响:1)电压引起的热形变应力;2)相邻驱动器间的相互作用力。单驱动器加电时,镜面绕对边转动,得到高度变化量Δd。由于镜面内力作用,相邻2个驱动器会产生高度变化量Δd/2。假设微镜为线性系统,4个驱动器的形变为热应力形变与相互作用力形变叠加的结果。利用线性叠加原理可以通过矩阵得到输入信号与驱动器形变的关系

(22)
其中,f(u)为式(17),Δdi为驱动器i的高度变化量,ui为驱动器i输入电压值。微镜4个驱动器高度的变化会引起镜面的二维转动,转动角度计算如下
(23)
其中,w为镜面宽度。综上所述,由式(22)可以得到不同输入下4个驱动器的形变,再通过式(23)计算出微镜的偏转角度,从而确定镜面的空间位置。
3 模型验证与性能分析
验证实验在常温下(20 ℃)进行,使用自对焦显微镜(型号:奥林巴斯STM6)测量微镜的静态响应数据,通过对比不同驱动方式下微镜与模型数据的吻合度来验证静态模型的准确性。
单电压驱动时,实验与模型数据对比如图6所示。当驱动器1输入电压由0 V变化到3 V,其余输入稳定电压时(驱动器2,3,4分别输入电压1,2,2 V),实验与模型数据的对比如图6(a)所示。由图可知4个驱动器的电压—高度变化呈线性关系且模型数据略高于实验数据,这是由于热应力形变推导过程中,忽略了热对流和热辐射影响,驱动器的实际温度略低于理论值。从数据对比中发现模型与实验结果的最大误差在10.99 %以内。图6(b)表征相同驱动条件下,微镜的两轴运动情况。一轴偏转,另一轴相对静止,模型与实验数据接近,最大偏差0.39°。
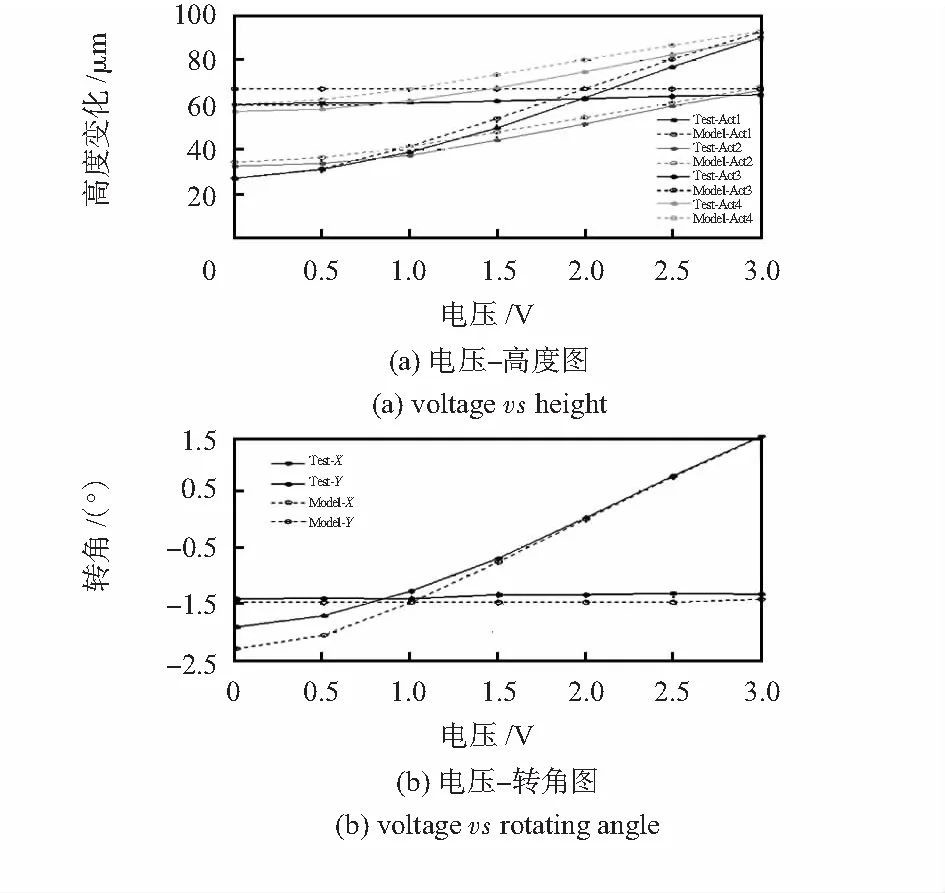
图6 单驱动器驱动模型数据对比Fig 6 Datas comparison of drive model for single driver
输入差分信号时,实验与模型数据对比如图7所示。驱动器1,3输入差分渐变电压,驱动器2,4输入1.5 V稳定信号。由图7(a)可知模型与实验数据接近,误差在12.07 %以内。因驱动器1,3输入差分信号,所以,两者的电压—高度是相反的线性关系。图7(b)表征此时镜面绕X轴转动,模型与实验结果较吻合,最大偏差为0.22°,模型能够较准确地预测不同输入时,4个驱动器形变情况和微镜的电压与转角关系。
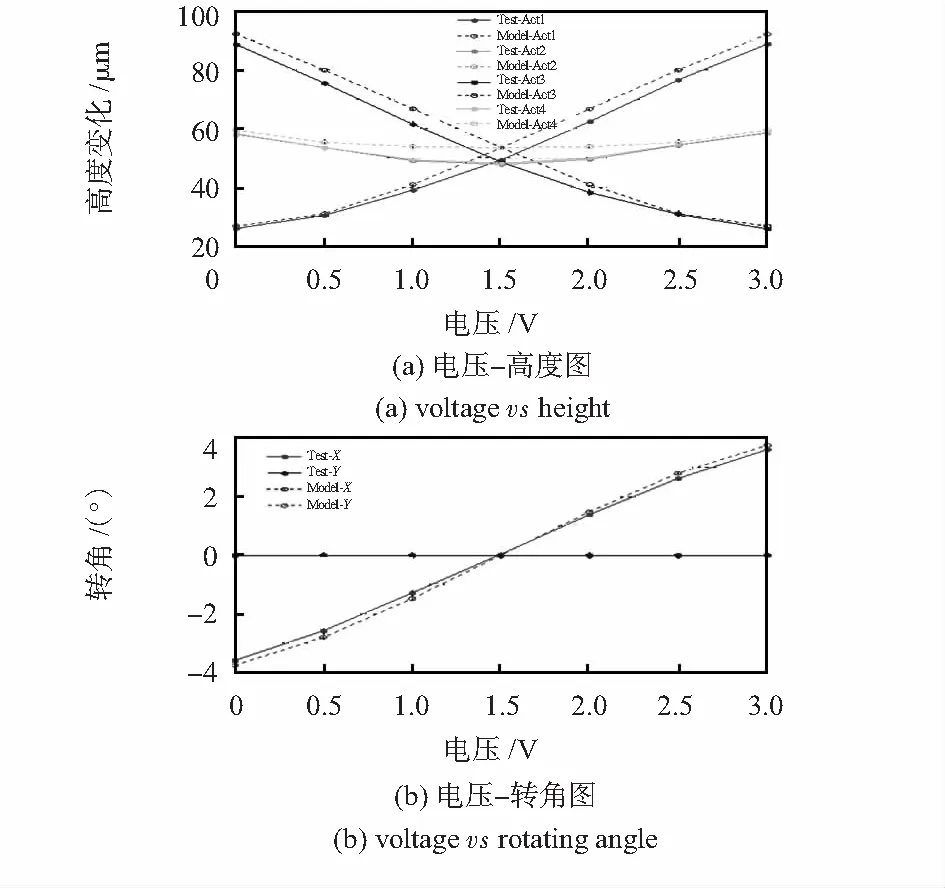
图7 差分电压驱动模型数据对比Fig 7 Datas comparison of drive model for differential voltage
4 结 论
本文提出了一种针对双S 形Bimorph结构微镜系统的静态模型解析方法。通过热传导和机械转动分析,提出了热导和弹簧刚体模型,解决了多驱动器间相互作用力和热传导对系统影响的问题。通过模型与实验数据比较,证实此模型能够预测微镜的静态响应特性,误差在12.07 %以内,最大角度偏差为0.39°。该模型可以应用于多自由度Bimorph结构微镜的静态偏转分析,解决了二维微镜驱动器间耦合问题,对系统仿真和控制有一定价值。
[1] Samuelson S R,Xie H.A large piston displacement MEMS mirror with electrothermal ladder actuator arrays for ultra-low tilt applications[J].Micro-electro-mechanical Systems,2013,23(1):39-49.
[2] 陈家凤,陈海清.MEMS变形反射镜主要特性测试[J].光子学报,2009,38(12):3245-3249.
[3] 黎仁刚,黄庆安,李伟华.Bimorph结构微热执行器的节点分析方法[J].仪器仪表学报,2007,28(4):728-733.
[4] Nakajima M,Kuwabara K,Sakata T.Low-voltage-actuated MEMS mirror array with high fill factor for photonic switch application-s[C]∥Proc of the 17th International Conference on Solid-State Sensors,Actuators and Microsystems,Barcelona,Spain.2013:1416-1419.
[5] Zhang X Y,Liu L,Liang W X.An electrothermal/electrostatic dual driven MEMS scanner with large in-plane and out-of-plane displacement[C]∥Proc IEEE of Optical MEMS and Nanophoto-nics,Kanazawa,Japan,2013:13-14.
[6] Todd S T,Xie H.An electro-thermo-mechanical lumped element model of an electrothermal bimorph actuator[J].J Microelectromech,Syst,2008,17(1):213-225.
[7] Xu Y,Singh J,Premachandran C S.Design and development of a 3D scanning MEMS OCT probe using a novel SiOB package assembly[J].J Micromech Microeng,2008,18(12):11-23.
[8] Wu L,Xie H.Low-voltage,laser-range MEMS optical scanning and their applications[D].Gainesville,USA:University of Florida,2009:43-123.
[9] Chen Q,Zhang H,Xie H.Repeatability study of 2D MEMS mi-rrors based on s-shaped Al/SiO2bimorphs[C]∥Proc of IEEE,the 8th NEMS Conf,Suzhou,China,2013:817-820.
[10] Jia K M,Sagnik P,Xie H.An electrothermal tip-tilt-piston micro-mirror based on folded dual S-shaped bimorphs[J].Journal of Micro-electro-mechanical System,2009,18(5):1004-1014.
A model analytical method of multi-DOF electrothermal MEMS micro-mirror
ZHANG Hao1,2, XU Da-cheng1, CHEN Qiao2, XIE Hui-kai3
(1.College of Electronics and Information Science,Soochow University,Suzhou 215000,China;2.Wuxi WiO Technology Co Ltd,Wuxi 214000,China;3.Department of Electrical and Computer Engineering,University of Florida 32306,Gainesville,Florida,USA)
The deformation reason of actuator caused by heat conduction and interaction force is analyzed by introducing thermal conduction and spring rigid model combined with structure of micro-mirror actuator,and multi-DOF mathematical model for micro-mirror is established.Comparison of simulation,and experimental data show that the constructed model agrees well with experimental results,it can predict input responses characteristics of four actuators.
MEMS micro-mirror; mathematical modeling; actuator
10.13873/J.1000—9787(2014)10—0017—04
2014—03—04
文献标识码:A 文章编号:1000—9787(2014)10—0017—04
章 皓(1988-),男,江苏苏州人,硕士研究生,主要研究方向为MEMS传感器建模与控制。
