倾角传感器的温度补偿研究
2014-07-07刘志远赵佳龙
于 娜,刘志远,赵佳龙
(中国电子科技集团公司 第四十九研究所,黑龙江 哈尔滨 150001)
倾角传感器的温度补偿研究
于 娜,刘志远,赵佳龙
(中国电子科技集团公司 第四十九研究所,黑龙江 哈尔滨 150001)
半导体元件参数随温度变化而产生的温度漂移,将导致倾角传感器本身存在测量偏差,影响倾角测量的准确度。介绍了一种温度补偿方法,对基于加速度原理的差分电容式倾角传感器进行了温度补偿。经过试验验证结果表明:这种方法能够实现倾角传感器的温度补偿,在-55~85 ℃温度范围内可将倾角传感器的温漂降低1个数量级,有效地减少了环境温度对倾角传感器性能的影响。
倾角传感器;加速度;温度补偿
0 引 言
在航天航空、军事火控、地质测绘、桥梁检测、机械建筑等领域中,为了达到状态监测和姿态控制的目的,要求倾角传感器能精确测量某平面相对水平面的倾斜角度。在高精度激光仪器水平、船舶航行姿态测量、地质设备倾斜监测、卫星通信车、姿态检测等领域也都需要用倾角传感器对角度进行精确测量。由于倾角传感器长期工作在露天等环境恶劣的场合,工作环境温度变化较大,且温度变化引起的热输出会带来较大的测量误差,特别是半导体元件参数随温度变化而产生的温度漂移,将导致倾角传感器本身存在测量偏差,影响倾角测量的准确度[1,2]。同时,温度变化也影响零点和灵敏度值的大小,继而影响到传感器的静特性,所以,必须采取措施以减少或消除温度变化带来的影响,即必须进行温度补偿。
倾角传感器温度补偿方法一般分为硬件补偿法和软件补偿法。硬件补偿法主要是通过改变器件结构、材料、工作环境和工艺等方法提高测量结果的可靠性来实现的,它的优点是硬件参数比较固定,利于量产,缺点是控制精度不高,灵活性差,结构复杂,很难达到理想效果。软件补偿是通过实验进行误差分离和补偿[2],随着IC技术的发展,在线可编程的处理器件可以更加方便地修改参数,控制精度和时间,因此,目前对倾角传感器多采用软件方式进行温度补偿。
针对倾角传感器的温漂问题,本文提出了一种温度补偿方法,试验表明:该方法极大减低了温度对倾角传感器的影响,取得了良好的补偿效果。
1 倾角传感器原理与电路结构
1.1 测量原理
传感器选用的是COLIBRYS公司的MS9000系列加速度芯片[3],该芯片是基于加速度原理的电容式敏感芯片,其原理如图1所示。该差动电容由一对定极板和一个动极板组成,动极板与横梁相连,当有向左加速度信号时,电容C1减小,C2增大;同理,加速度反向时,C1增大,C2减小,两个电容成差动输出,通过检测电路将其转换成电压信号输出,根据此电压信号即可计算出加速度的大小[3,4]。
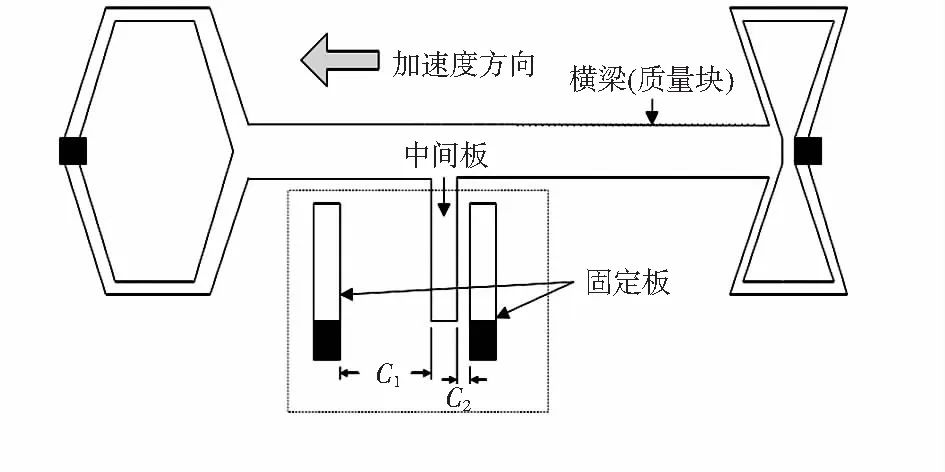
图1 差分电容式倾角传感器原理框图Fig 1 Principle block diagram of differential capacitive inclination sensor
1.2 传感器电路结构
传感器的电路结构框图如图2所示。单片机选用MSP430系列,其突出优点是低功耗,且所选芯片工作温度范围满足-55~85 ℃要求。
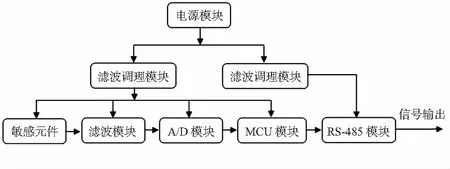
图2 电路结构框图Fig 2 Block diagram of circuit structure
2 倾角传感器温度补偿方法
已知角度敏感单元输出是电压U,且存在温度灵敏度。因此,只对角度敏感单元进行一维标定试验,并获得输入(角度A)—输出(电压U)特性曲线来求取被测角度值会有较大误差,因为被测量A不是输出值U的一元函数。现在由另一温度敏感单元输出电压Ut代表温度信息t,则角度参量A可以用U和Ut二元函数来表示,即
A=f(U,Ut).
(1)
同理,也可以将角度敏感单元输出电压U描述为角度参量A和温度敏感单元输出Ut的二元函数
U=g(A,Ut).
(2)
由二维坐标(Ui,Uit)决定Ai在一平面上,可利用二次曲面拟合方程来描述
(3)
同样
(4)


在角度敏感单元的量程范围内确定n个角度标定点,在工作温度范围内确定m个温度标定点,于是,由角度A与温度t构成的标准值发生器在各个标定点的标准输入值为
Ai:A1,A2,A3,A4,…,An,
tj:t1,t2,t3,t4,…,tm.
在m个不同温度状态下,经标定获得了m条角度敏感单元的输入—输出特性,即A-U特性簇,同时获得对应于不同角度状态的温度敏感单元的n条输入—输出特性(t-Ut),即t-Ut特性簇。

(5)
总计有m×n个标定点,其均方误差δ1为

(6)
由上式可见,均方误差δ1是常系数α0~α5的函数。为满足均方误差δ1取最小值,根据多元函数求极限条件,令下列各偏导数为零,即

则可得方程(7)
(7)
式中l=m×n为标定点的总数。
整理后可得
(8)
根据试验标定点的输入标准值Ak和tk;二敏感单元相应的输出值Uk和Utk;可以计算得到A~D,E~T诸值,从而可以联立求解矩阵方程(8),亦即矩阵方程(7)。于是,常系数α0~α5得以确定。至此,二次曲面拟合方程式(3)完全确定。
3 试验验证
试验测试了温度补偿前后倾角传感器在-55~85 ℃温度范围内的最大漂移量,测试结果如表1所示。
从表1测试数据可看出:传感器补偿前在温度范围内最大漂移量为0.89(°)/℃,补偿后最大漂移量为0.091(°)/℃,漂移量降低了1个数量级,该方法有效降低了温度对传感器准确度的影响。
4 结 论
针对倾角传感器的温漂问题,本文提出了一种温度补偿方法,经试验验证经该方法补偿后,传感器的温漂降低了1个数量级,有效降低了环境温度对传感器准确度的影响,增强了其环境适应性,能够满足实际环境的需要。该传感器具有体积小、低功耗、准确度高等特点,可以满足地质石油勘探、设备安装、道路桥梁建设等工程应用以及机器人控制、坦克和舰船火炮平台控制、飞机姿态控制等的自动水平调节应用,具有广泛的应用前景[5,6]。
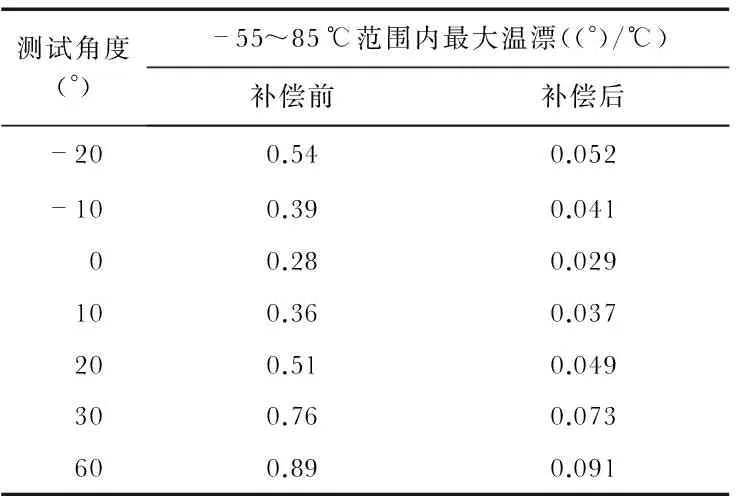
表1 倾角传感器温度补偿测试结果Tab 1 Temperature compensation test results of inclination sensor
[1] 吴 艳,郑学理,曾志强,等.倾角传感器温度特性研究[J].电子测量技术,2012,35(10):8-12.
[2] 周庆飞,徐明龙.具有温度自补偿功能的高分辨力倾角传感器的设计[J].传感器与微系统,2012,31(1):107-110.
[3] Colibrys.MS9000.D Single axis analog accelerometer datasheet[EB/OL].[2011—10—20].http:∥colibrys.com.
[4] 王 巍,李早平,王 军,等.基于微加速度传感器的倾角传感器[J].仪表技术与传感器,2010(12):12-13.
[5] Lin D W.Design of dual-axis inclinometer based on MEMS acce-lerometer[C]∥Proceedings of The 3rd International Conference on Measuring Technology and Mechatronics Automation,2011:959-961.
[6] 余小平,庹先国,王洪辉.基于SOC的高精度倾角测量系统的设计[J].电子设计工程,2010,18(12):34-37.
Research of temperature compensation of inclination sensor
YU Na, LIU Zhi-yuan, ZHAO Jia-long
(The 49th Research Institute,China Electronics Technology Group Corporation,Harbin 150001,China )
Temperature drift of parameters of semiconductor elements along with variation of temperature,will cause inclination sensor exists measurement deviation which impact accuracy.Introduce a temperature compensation method which carry out temperature compensation on differential capacitive inclination sensor based on acceleration principle.The test results show that this method can realize temperature compensation of inclination sensor and the temperature drift decline one order of magnitude at the temperature range of -55 ℃~85 ℃,and effectively reduces impact of environment temperature on characteristics of inclination sensor.
inclination sensor; acceleration; temperature compensation
10.13873/J.1000—9787(2014)10—0014—03
2014—07—23
TP 212
A
1000—9787(2014)10—0014—03
于 娜(1981-),女,黑龙江齐齐哈尔人,硕士,研究方向为信号与信息处理。
