自解释道路理念探析
2014-07-06杨春风
杨春风,陈 曦
(河北工业大学,天津 300401)
0 引言
我国当前路线设计是以设计车速理论为路线设计的基本方法,以设计车速作为路线设计的基础指标,决定了几乎所有的设计参数。但是,由于设计车速理论是以汽车在道路中行驶的动力学为基础推导而来,对人的生理、心理和道路实际外在条件考虑严重不足。实际中,驾驶员总是倾向于采用在当前条件下所能达到的较高的速度行驶,因此,即使是各项指标符合要求的道路线形也无法保证行车的安全性。近年来相继提出的路侧安全设计、运行速度设计等理念都从不同层面分析了道路安全设计问题,取得了一定的效果,但却并未从根本上解决道路安全问题。
荷兰最早提出了自解释道路理念,认为驾驶员在道路上的驾驶行为与他们对道路的认知程度及愿景密切相关,并针对特定类型道路提出了能够保证相对持久安全性的设计原则。
所谓的“自解释道路”(SER)是一种通过其自身设计引导安全行为的交通运行环境。据统计有90%以上的交通事故与人为错误有关,无论多全面的外在措施也只能从侧面减少交通事故,因此重要的是协调驾驶员与道路及车辆运行环境的关系,从系统上提高安全性,关键问题是遵循何种原则进行设计可以在道路的使用过程中减少错误的发生。故在道路本身固有安全性的前提下,应按照驾驶员的期望构建具有自解释性的交通系统。
1 道路环境的分类
我国现行的道路设计标准及规范以设计速度为设计依据和道路分类分级的标准,相同设计速度的道路表现形式差异很大。设计速度是在道路正常情况下一般司机可以持续安全行驶的速度,并未直接考虑道路其他使用者对速度的影响,而是以通行能力的变化间接地体现。所以根据不同的道路表观形式及交通环境定义设计速度更有意义。
驾驶员在驾车行驶中采用的驾驶行为,是基于其经验及记忆对道路交通环境做出的判断,而这种判断是潜意识的,是基于人们总是将心中的世界结构化的固有行为之上的。经验及记忆并非针对单一事件或环境,而是多事件或环境的集合,这些集合涵盖了众多具有不同典型特征的对象,而具有相同典型特征的对象在行为方式上具有一致性。当驾驶员驾车行驶在某一特定环境中时,根据经验及记忆做出判断,采取相应的驾驶行为。若这个判断与实际相符,则为正确的行为,反之则为误,极有可能导致交通事故。但问题是具有相同本质及不同本质的对象有时会产生具有相同典型特征的表象,或具有相同本质的对象产生具有不相同的典型特征的表象,而直接影响驾驶员做出正确的判断。如在荷兰,有15%~20%的司机把允许高速行驶且具有硬路肩的非高速公路误认为高速公路,而采用高速公路的驾驶行为。这个问题在交通环境的构建中是极为重要的。
假设驾驶员可以由其自身经验归纳出不同类型道路的特点,当一类特定的道路环境在物理外观上性质相同并且区别于其他类型,则其典型表征可以很容易地归纳出来。例如,如果要求驾驶员描述一条高速公路,那么关于道路元素和驾驶员以及它们之间的关系和定位会十分一致。如果让驾驶员描述一条设计时速为80km/h的公路,那么答案就可能不一致,因为这些类型的道路不只是外形上没有共同点,它们所呈现的特性也没有共同点。当一类道路在外型上没有共同点的时候,驾驶员就会根据之前的一些经验来建立一个反映这类道路的有偏差的模型:例如,一个人根据每天上班时都走的设计时速为60km/h的道路建立的模型跟其他的设计时速为60km/h道路肯定是有差别的。
道路环境的分类建立在这些道路体现出的交通行为之上[1]。这意味着,一些产生相同类型交通行为的不同类型道路都会被主观地归为相同类型。一条所有车辆以60km/h的速度行驶的低等级城市道路和一条以相同速度运行的城市快速路会被以相同的方式分类。不适当的分类是危险的,因为不适当的分类将带来错误的期望。
2 交通行为的影响
道路交通环境与道路的典型特征相一致。包含了道路元素与驾驶员之间关系的典型信息被称为图式[2],图式的概念来源于心理学,即人脑中已有的知识经验的网络。对于一般的驾驶员而言,首先由道路的典型特征界定交通环境,然后再采取相应的驾驶行为,也就是说交通环境决定了驾驶行为。而驾驶员心目中的交通环境既包括道路元素——道路典型特征本身,也包括道路元素与驾驶行为之间的典型关系信息。实际上,典型关系信息是由特定的道路环境激活的[3]。基于此,在道路设计中应协调道路元素与驾驶员驾驶行为,以满足驾驶员的正常预期,否则其会产生误判,发生错误的驾驶行为。正确的驾驶行为来源于正确的信息,即道路元素的获得及驾驶员记忆中的道路元素与驾驶行为间的典型关系信息。这是通过驾驶员观察获得道路总体信息,然后对储存的记忆信息进行搜索、加工而完成的。
通过测试可以看出日常交通场景中视觉搜索信息的影响,反应出搜索目标往往在某个场景中占据一个特定的位置。从这个测试可以反应驾驶员对特定目标对象的位置产生错误预期时错误的演变过程。图1即为此测试中所用到的场景。

图1 测试交通场景
受试者被要求寻找交通标志牌,当他们找到时回答“是”,当他们认为没有交通标志牌时则回答“否”。在图1(a)中,交通标志牌放在了常规的地方,搜索平均时间为1112ms,错误率为6%。在图1(b)中,交通标牌被放在了道路的左侧——通常不是这个场景中人们想象的标志牌应该出现的位置。此图中人们找到标志牌的平均时间为1745ms,但有33%的人认为图中没有交通标志。两张图片在组成内容上完全相同,也就是说,两张图片上的交通标志的醒目性应该是完全一致的,而在结果上的差别应该可以归因于场景的布局诱导的搜索策略。图2给出了22个在不同的交通场景中搜寻不同目标(如交通标志牌、自行车、汽车)的平均反应时间和错误率。
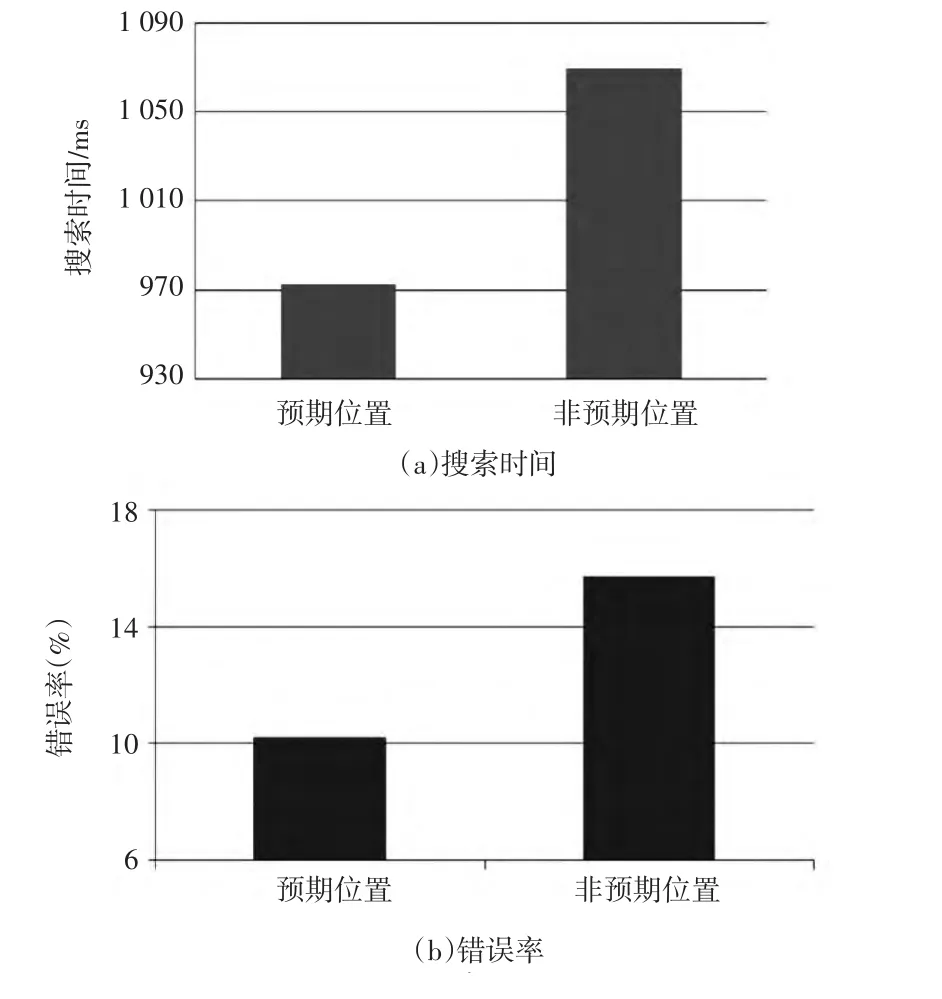
图2 在自然交通场景中搜索在预期位置和非预期位置目标的平均搜索时间和错误率
由图2可知,视觉搜索行为依赖于由环境引导的期望。环境布局可以激活一个特定的图式,这个测试明确地得出了搜索行为集中于目标预期位置的结论。这种搜索机制在实际驾驶中的影响会更强,特别是在城市交通高峰期这种视觉负担相对较高的条件下或是夜间行车这种视觉条件受限的情况下。在这些情况下,便捷而且基于人自身理念的特征搜索机制就显得尤为重要。另外,由图2易知,当目标位于意料之外的位置时并不会被发现的特别晚,不过在更多情况下根本不会被看到。也就是说,当人们去搜寻不在预期位置的目标时会倾向于目标根本不存在。事实上,交通事故实际统计数据似乎已经证明了这一观点:大约37%的驾驶员在遭遇紧急情况的时候并非采取措施过晚,而是不采取任何措施。此外,由于对交通环境不适当的预测或解读造成的交通事故已经占到了交通事故总数的59%。而如果驾驶员在预期的位置找到了目标,正确的预期就会被不断地加强,因为当前交通环境是合理的、可预测的。
通过以上测试可以看出,视觉选择并不是十分依赖于目标的醒目程度,而是更多地取决于交通参与者自身的搜索。当目标自身与当前的搜索无关时,即使它很明显也不易被察觉。即,当交通环境给了交通参与者错误的诱导时,就算是有醒目的标志和其他基建方面的措施也难以纠正这些行为,因为这些东西往往会被直接忽视。
虽然目前还没有关于这些预期有效时限的实验数据,但可以明确的是这些预期一旦产生就很难被轻易改变。类型不明确的道路将使驾驶员产生混乱,如果一条道路的布局最初使驾驶员认为这是一条高速公路,那么驾驶员将持续地将这条路当作高速公路驾驶。因此,在交通网络中具有相同功能的道路应当按照统一的道路类型进行设计,连接相同区域的道路也应该按照相同的原则进行设计,同时,不同种类道路产生交叉的时候应该有明确的标识并有过渡缓冲。
3 结论
当道路一直符合驾驶员预期的时候,道路就是在自我解释。在荷兰,高速公路一般都具有自我解释特性及固有安全性,但是仍有很大一部分普通公路并不符合之前提到的安全原则。因为这些道路不易归并出明显的典型特征,也不具备特定的典型关系。这些道路具有如下特征:
(1)从道路设计上无法推断出慢行交通发生的概率;
(2)经常无法明确是否产生对向交通;
(3)没有很好地标记车道的出口以及交叉口的存在和位置;
(4)通常难以准确地估计弯道的位置以及通过弯道所要求的最大速度。
所以,应当遵循“积极引导”和本着驾驶员预期的原则来构建道路环境,应用一些统一的标准来减少驾驶员在驾驶过程中因为道路本身发生错误的可能性,并且还能体现驾驶员遇到不同的交通参与者的概率。
目前,关于交通环境分类的研究很少,道路元素与驾驶行为之间的典型关系信息通过何种方式来影响交通行为也不是很明确。但是,从理论角度出发,可以尝试给出一些标准来增加道路自我解释的特性。根据我国的道路状况可以归纳出以下四类道路:高速公路、连接城市不同区域的城市快速路;一级公路、城市进出口路;二级公路、连接城市主要分区的主干路;三级、四级公路和城市次干路及支路。从这四种分类出发,自解释道路应该满足以下暂定标准:
(1)每一类型的道路都应该具有区别于其他类型道路的独特道路元素,例如,高速公路全封闭的特征;
(2)每一类的道路都能由其独特的道路元素引导出其对应的独特的交通行为,例如,车辆在全封闭无行人与非机动车的高速公路上快速行驶;
(3)道路的交叉、路段和曲线的布置都应当与特定的道路分类独特地连接起来,例如,高速公路和城市快速路的交叉布置无论是从形式上还是交通行为上都是完全区别于其他道路的交叉;
(4)交通参与者应当由其所进行的交通行为选择出行道路的类型,即,应当以道路承担的不同的功能的角度来区分道路的类型;
(5)不同类型的道路衔接时应有所过渡,以便交通行为的改变,例如,当前方道路类型即将产生变化或与其他类型道路产生平交时应用隆声带等措施提示驾驶员;当从一种类型的道路过渡到另一种类型的道路时应设置足够的加减速车道;
(6)保证视距不良路段道路典型特征的可见性,便于道路类型的判别,以防止交通行为产生混乱;
(7)道路设计时应该逐渐淡化道路在速度上的差异而转为通过道路类型的区别进行设计;
(8)交通控制系统应该与道路类型关联起来,如:高速公路的控制系统应注重控制交通流量,乡村公路的控制系统应注重控制车速。
将自我解释的理念引入道路的发展中,还可以使道路环境朝着更加智能的现代化的交通系统方向发展。例如,车用导航系统与沿路的可变交通指示牌整合,可以引导交通流量,减少导航路径的不确定性并且可以消除交通流中的不稳定因素(例如堵车),还可以根据当地实际情况(交通强度,雨水,雾等)给出的速度建议,优化交通流量。
[1] Mazet C,Dubois D.Mental Organizations of Road Situations:Theory of Cognitive and Methological Consequences[Z].Leidschendam:Institute for Road Safety Research,1988.
[2] McClelland J,Rumelhart D.An Interactive Activation Model of Context Effects in Letter Perception:Part 1.An Account of Basic Findings[J].Psychological Review,1981,88(5):375-407.
[3] Potter M C.Meaning in Visual Search[J].Science,1975,187(4180):965-966.
[4] Sussman E D,Bishop H,Madnick B,et al.Driver inattention and highway safety.Transportation Research Record,1985,(1047):40-48.
[5] Theeuwes J,Hagenzieker M P.Visual Search of Traffic Scenes:on the Effect of Location Expectations[C]//Proceedings of the Fourth International Conference on Vision in Vehicles.Amsterdam:North-Holland Publishing Company,1991:149-158.
[6] Alexander G J,Lunenfeld H.Driver Expectancy in Highway Design and Traffic Operations[R].Washington,D.C.:Administration Office of Traffic Operations U.S.Department of Transportation Federal Highway,1986.
