基于PLC运动控制的平面磁场图景绘制仪
2014-07-06由佳欣罗福彪赵冰心梁慧敏
由佳欣,罗福彪,赵冰心,梁慧敏
(1.电气工程及自动化学院哈尔滨工业大学黑龙江省哈尔滨150001;2.桂林航天电子有限公司广西壮族自治区桂林541002)
1 引言
磁场图景的绘制一直以来使用手工播撒磁粉或使用稀疏磁针阵列来获取,效率较低,自动化程度不高,较难适应不同形状磁体的测绘,且存在重复性差的问题[1]。随着对电磁机构空间静磁场及永磁体研究的深入,需要获得不同形状永磁体、以及含永磁的机电元件的磁场图景进行定性分析,因此需要研制自动化的平面磁场图景绘制系统,以实现快速、准确的自动化测绘[2]。
运动控制技术作为机电一体化的关键组成部分,正由面向传统的数控加工行业专用控制技术而发展为具有开放结构、能结合具体应用要求而快速重组的先进运动控制技术[3-5]。包括全闭环交流伺服驱动技术、直线电机驱动技术、可编程逻辑控制器(PLC)技术及运动控制卡技术等几种具有代表性的运动控制技术都有着灵活而广泛的应用;其中PLC更具有运动控制实现灵活,外围设备更易于扩展、重构的特点[6-8]。
本文将PLC的运动控制功能应用于磁场图景绘制仪的平面位置控制中,在基于PLC的运动控制平台之上,通过合理的硬件设计配合伺服电机与控制单元,组合成为适合进行磁场测绘的二维运动控制系统,设计自动播撒装置和图像采集装置,实现对平面磁场的自动化测绘;磁场绘制仪为永磁体磁场的研究提供了一种定性分析的辅助手段,在永磁体磁场研究及元器件设计等方面具有实用价值。
2 系统硬件平台设计
2.1 磁场图景绘制系统电控部分设计
磁场图景绘制系统电控部分设计的核心是运动控制平台。运动控制的电控部分主要包括:PLC控制平台、伺服模块、伺服驱动器以及伺服电机。
运动控制部分的控制过程为:PC与PLC控制平台的处理器通过RS232串口实现通讯,将PLC程序下载至处理器中,控制器上的伺服模块通过光纤与被控的交流伺服驱动器串接成一个通信回路,伺服驱动器通过机械旋钮分配好各自的节点号,然后经电缆与运动控制中各轴电机建立控制通道,运动控制的电控部分的接线如图1所示。

图1 运动控制部分的总体接线图
其中,Mx1、Mx2、My、Mz分别代表各个控制轴。
2.2 系统机械部分设计
运动控制的机械部分是本系统的主要控制对象,它是自动播撒磁粉装置运动的载体,通过控制x,y,z轴的运动实现系统功能。运动框架及控制轴示意图如图2所示。
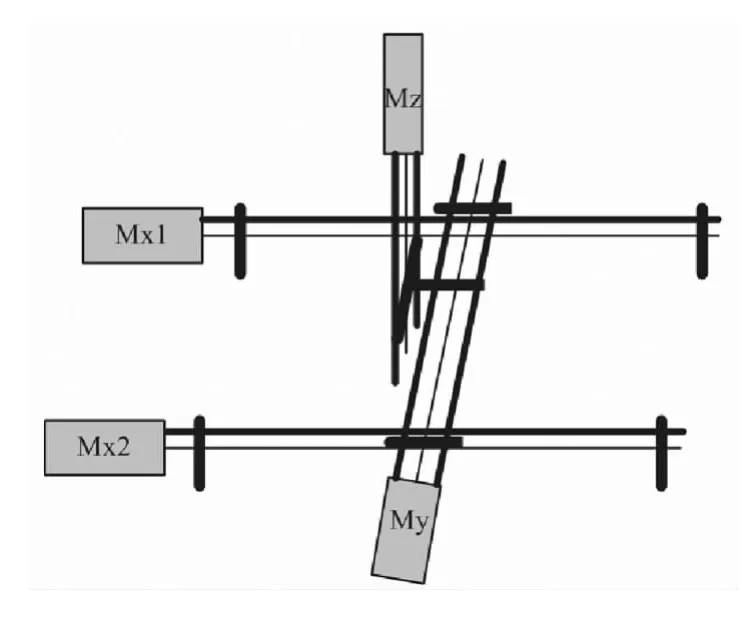
图2 运动框架示意图
x、y、z轴的机械结构包括伺服电机、通过联轴器与电机相连的丝杠以及导向杆。x方向是由两个平行电机同步转动控制,实现机构运动的。z轴装配于y轴上,通过丝杠传动即可实现在y方向的运动。播撒磁粉及回收装置安装在z轴上,通过z轴电机控制上下的运动以及与x、y轴电机控制的平面运动相配合,完成播撒磁粉工作。三维运动控制系统机械部分如图3所示。
使用水平测量计调整机械设备的水平度,即保证x-y轴平面处于水平位置,减小由于磁场图景平面水平度不佳而造成的实验结果的误差。
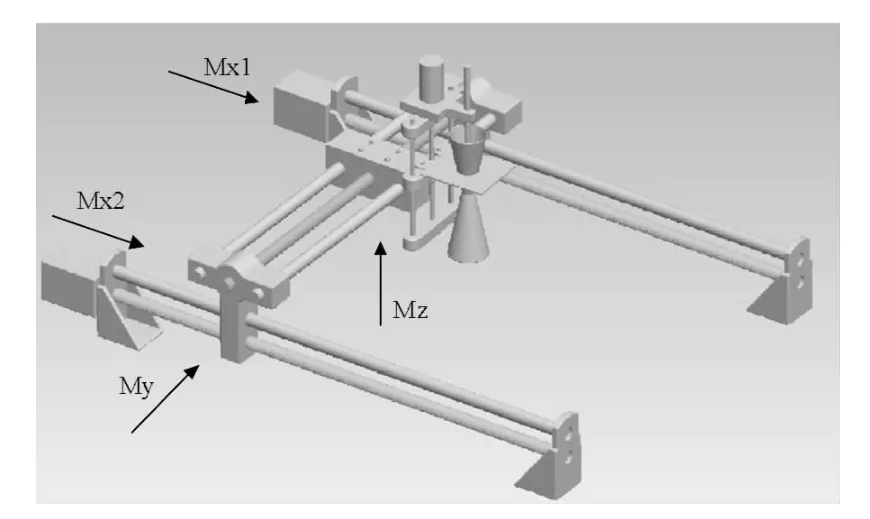
图3 三维运动控制系统机械仿真结构图
自动播撒磁粉装置安装在运动控制机械框架的z轴上,基于运动平台实现在指定区域的磁粉播撒。自动播撒磁粉装置采用漏斗式结构,将磁粉装在磁粉漏斗中,通过编程控制z轴电机运动,对漏斗口进行开关控制,且通过上下移动的范围可以控制漏斗口间隙,从而控制磁粉播撒的量。
底板用来盛接播撒的磁粉,根据所测永磁体或电磁机构来确定其总尺寸;底板总体尺寸为磁粉播撒最大范围;在底板正中间预留出被测器件的空间,用于放置永磁体或电磁机构。
3 PLC程序设计及上位机软件设计
3.1 控制主程序的编写
系统中的PLC选用了AB公司的产品,软件编程采用RSLogix5000,通讯软件为RSLinx。
控制主程序主要完成全局控制功能,其中包括伺服驱动器的使能与禁止、各轴电机清错与复位等。程序流程如图4所示。
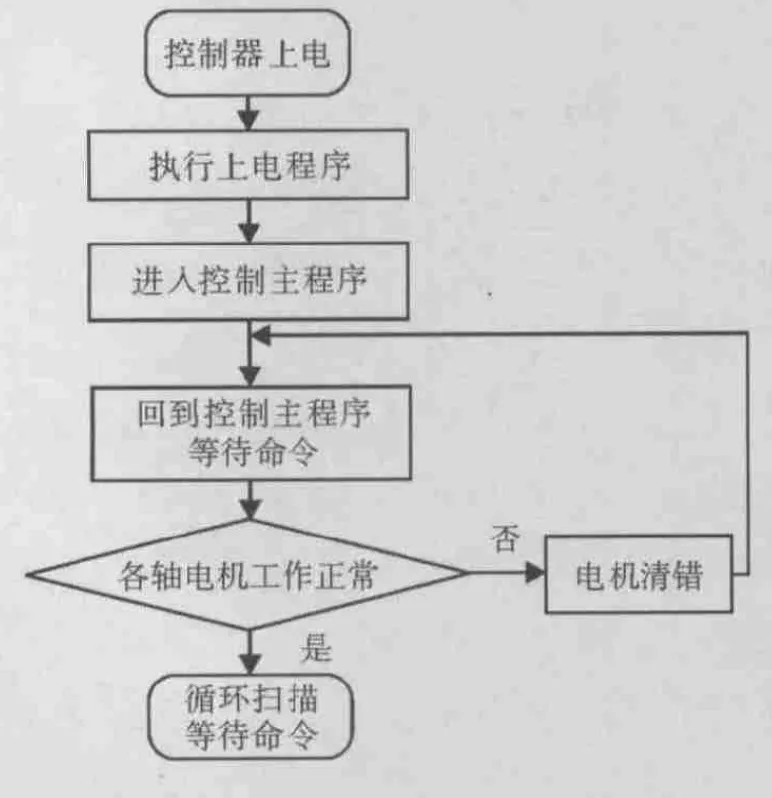
图4 控制主程序流程图
3.2 绘图子程序的编写
绘制子程序根据输入的命令信号,绘制指定区域图形。磁粉播撒需要均匀快速,结合本系统三轴运动控制及播撒磁粉装置的机械结构特点,选择x轴往复直线运动与y轴方向移动运动配合,来实现整个指定区域的磁粉播撒。
实现三轴协调运动的主要指令为直线运动命令,该指令的最大特点为只需指定运动轨迹的关键点坐标、运动方向及运动方式等参数,而不需要各轴在实现直线运动中的动作信息,这样就大大简化了运动控制的编程工作。在指定区域播撒的运动就可以直接通过给出边界处点的坐标数组来实现。可根据指定的区域面积,多次试运行得出x轴方向往复运动范围及y轴方向较为合适的位移间距。
运动控制思路:x、y轴初始位置设在要播撒磁粉的区域的原点,z轴初始位置是处于磁粉漏斗口关闭的状态。上电后首先使能各轴的驱动器,设定零点。在播撒磁粉之前,使z轴向上运动,即磁粉漏斗口处于打开状态;控制x、y轴的运动使得磁粉按照预定区域一排一排地播撒,并配合z轴运动以增加磁粉的流动性;最后播撒完毕,回到零点,并使z轴向下运动,关闭磁粉漏斗口,为下一次播撒做准备。绘制子程序的程序流程图如图5所示。
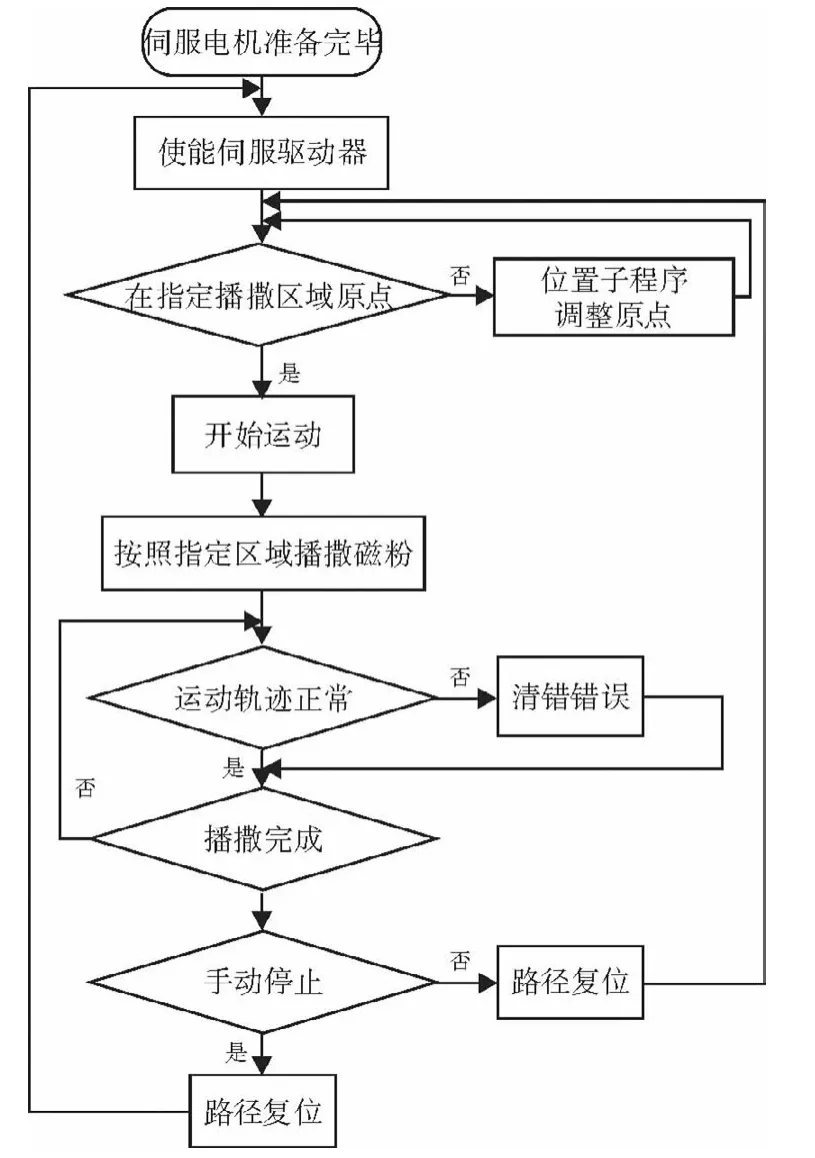
图5 绘图子程序流程图
根据常见测量的尺寸参数,设计播撒磁粉区域的面积约为150mm×150mm。
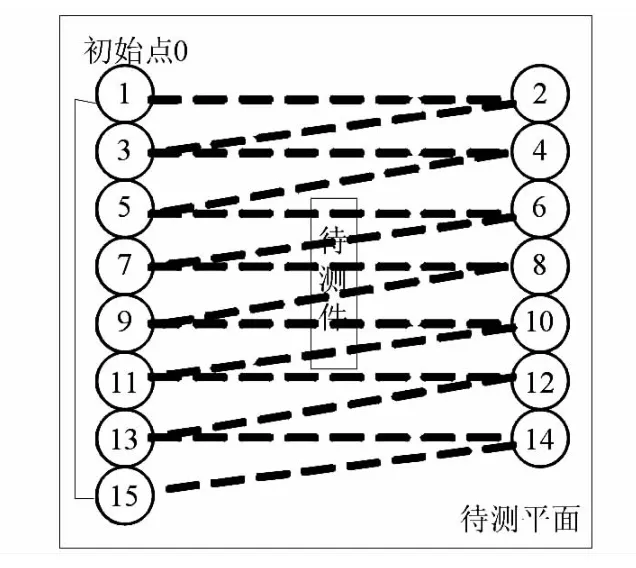
图6 播撒磁粉装置x-y平面的运动路径
根据直线运动指令的特点,将运动轨迹用运动点来表示,多次试验得出,较为合适的运动点为x轴位置范围150mm,y轴位置间25mm。将运动点从0到15进行标号,运动轨迹从0到15顺序执行,最后回到初始点0。播撒磁粉装置x-y轴的运动路径如图6所示。
对于z轴方向,播撒磁粉装置的初始位置时漏斗口处于闭合状态,故开始播撒前,需要漏斗口处于打开状态,即上电开始运动后,z轴需要向上运动至漏斗口打开。考虑到播撒中z轴处于同一位置磁粉播撒的间断现象,将播撒运动中z轴的位置设置为运动状态,即z轴会在上下位置单位反复小距离运动,以保证磁粉播撒的连续性。
3.3 上位机控制软件
本系统的上位机控制软件可以实现控制与信息反馈功能,如图7所示。主要有三个组成部分:控制信号部分、演示部分和参数设置及监控部分。软件界面划分为七个区域:主控制信号区、位置调试信号区、运动演示x-y平面区、运动演示x-z平面区、参数设置区、位置监控区、状态显示区。
其中,主控制信号区主要是实现伺服电机的驱动与禁止、运动轴的复位等的控制功能。位置调试信号区主要实现手动调节x、y、z轴的位置控制,实现位置子程序的功能;运动演示x-y平面区可以实时显示磁场图景绘制系统在x-y轴平面的运动状态;状态显示区显示各轴伺服电机的当前状态指示;运动演示x-y平面区可以显示x、y运动轴组件的位置、已磁粉播撒面积等。
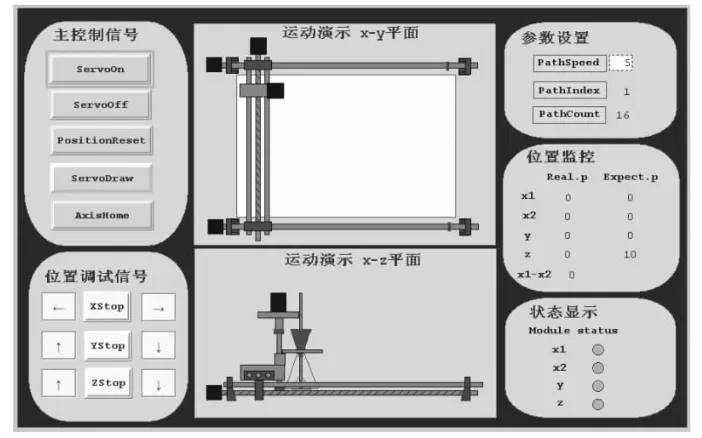
图7 人机界面
4 磁场图景实测绘制
以某牌号FeCrCo条形永磁单体为例,永磁尺寸为60mm×10mm×6mm,测试截面为长度方向中心截面;在播撒磁粉前,需要预制形状适合的平面底板,并联合调整系统平台的水平度;再调整图像采集装置位置,保证摄像头平面与播撒磁粉底板平行,减小实验测量误差。
经过大量反复实验发现,磁粉在颗粒较大时流动性较差,不能够均匀地从漏斗口流出。故在选择磁粉上,要尽量保证颗粒大小细小且均匀,本实验选择300目的还原铁粉,颗粒直径在48um左右,铁粉含量99.2%。磁场图景绘制系统及运行本系统所测量的条形永磁磁场分布图景,如图8所示。
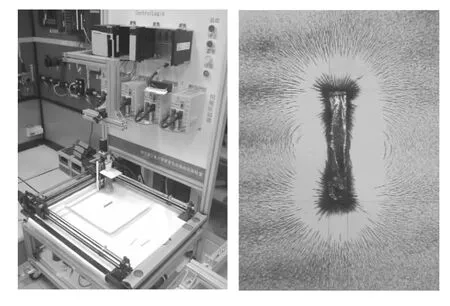
图8 磁场图景绘制仪实物及仪器绘制的条形永磁体平面磁场图景
由于实验测量中永磁会将其近距离的磁粉吸附,故无法看到永磁附近区域的磁力线分布,但通过上图可以清晰的观察到条形磁铁的绝大部分区域的磁场图景。
5 结论
(1)本文设计制作了平面磁场图景绘制仪硬件平台,其中包括三轴运动电控部分、机械部分、磁粉播撒装置等,能够实现三轴运动控制及磁粉的自动播撒。
(2)编写的PLC控制程序实现了轴位调试、三轴运动控制等功能,实现了控制设备在指定区域均匀快速播撒磁粉。编制的人机界面能够方便快捷地实现播撒磁粉设备的启动、停止、轴位调试等功能,并对运行中的设备状态、磁粉播撒情况及相关数据进行实时监控,实现磁场图景绘制仪的可视化管理。
(3)实际运行该系统,通过固定的图像拍摄装置得到了某牌号条形永磁体中央截面的清晰磁场图景,实测达到了预期的效果。
[1]Nikolay Kardjilov,Ingo Manke.Three - dimensional imaging ofmagnetic fieldswith polarized neutrons[J].Nature Physics,2008,(4):399-403.
[2]梁慧敏,崔浩,张荣岭,翟国富.磁钢内部磁通测量装置的研制[J].机电元件,2008,28(2):3-5
[3]Shibata.Mand Murakami.T.Motion Control for Advanced Mechatronics[J].Industrial Electronics,2002,(1):56-64.
[4]乔志峰.适用于复杂形面加工的多轴运动控制系统设计理论与方法研究[D].博士论文,天津大学,2012,:25 -26.
[5]黄益群,张海荣等.运动控制新技术[J].伺服控制,2005,(11):20-24.
[6]白娟娟,王越等.基于PLC控制的机械手可视化控制系统设计[J].机电元件,2012,32(4):16-18.
[7]王瑞.PLC软件构件化建模方法研究[D].博士论文,清华大学,2012:61.
[8]Xiaotao HAN,Zhiwei SONG.The DevelopmentofMeasurement and Control Software Applied To Small Pulsed High Magnetic Field Facility[J].Proceedings of 2009 Chinese Control and Decision Conference,2009,(3):4470-4474.