基于MAS舰艇编队协同防空作战决策模型研究*
2014-07-05张磊朱琳顾颀
张 磊 朱 琳 顾 颀
(1.海军指挥学院 南京 210016)(2.海军潜艇学院 青岛 266071)
基于MAS舰艇编队协同防空作战决策模型研究*
张 磊1朱 琳2顾 颀1
(1.海军指挥学院 南京 210016)(2.海军潜艇学院 青岛 266071)
从协作决策的角度重点研究了编队区域防空和点防御区防空火力的协作决策求解模型。其中区域防空火力的协作采用受制的协作方式,应用了“因需设岗”的协作思想,提出了“角色能力匹配+主客观综合赋权+直接命令”的协作机制,并针对权重的不确定性引入了多目标模糊决策理论。点防御区的协作采用自治的协作方式,提出了计划融合冲突消解的协作机制。最后,通过实例对协作决策模型进行计算分析,验证了模型的合理性。
协作; 编队防空; 模糊决策
Class Number TP391.9
1 引言
现代海战中,舰艇编队在遂行海上作战任务过程中,对空中目标的防御要贯穿始终。对空防御必须实时处理大量信息,并实时做出防御决策,比如编队指挥员对编队区域防空导弹的分配、各舰指挥员对本舰近程防空武器的分配等,这些决策任务对指挥员的指挥能力提出很高的要求,需要借助防空作战软件来提供辅助决策。而随着海上作战环境的日益复杂及通信技术、飞航技术等高科技的不断发展,如精确制导武器和电子战手段的广泛应用,现有的编队防空决策模型已日益凸显出灵活性动态性不够、复杂决策问题处理困难、缺乏协作等问题。因此一个具有智能化的分布式编队辅助决策模型将是提高编队防空效能、保障舰艇生命力的重要保证。
多智能体系统(Multi-Agent System,MAS)是当今分布式人工智能研究的热点,该理论不仅拥有单个Agent本身自主性、社会性等优良特性,而且具有Agent之间相互协调合作解决复杂决策任务的能力。因此,鉴于当前舰艇编队防空决策模型的局限性和未来海战防空决策问题的复杂性特点,基于MAS的复杂决策建模理论能为编队防空决策提供一种新的思路和方法。
2 舰艇编队区域防空火力的协作决策流程
区域防空火力分配的决策问题主要指在来袭导弹的航路上分配最适合的区域防空导弹进行抗击,尽量将来袭导弹拦截在最远距离上,且抗击失败后能有下一波的导弹继续发射进行抗击。舰艇编队区域防空火力分配决策任务的动态协作流程,如图1所示[1~2]。

图1 编队区域防空火协作配决策的流程图
3 舰艇编队区域防空火力的协作机制
3.1 协作机制的主要内容
作为实现任务求解的主要方式—协作,其实现过程是很复杂的,协作过程能否顺利实现,是动态协作任务求解问题所要重点解决的关键问题。为了使协作过程能够顺利地实现,建立相应的协作机制是十分必要也是十分重要的。
协作机制具体包括协作方式、协作策略和协作方法三部分内容[3]。协作方式是指协作主体采用什么样的协作方案进行协作;协作策略是在协作方案确定的情况下,具体实现的过程,而协作方法是指对协作的每一个具体实现过程所采用的具体方法。
3.2 编队区域防空火力的协作机制
根据上文对协作机制三个方面的分析和研究,本文设计编队区域防空的协作机制为:“角色能力匹配+主客观综合赋权+指挥舰直接命令”。具体表述如下[4~5]:
指挥舰Agent发布协作任务,下属Agent舰接收协作任务,通过角色能力匹配判断是否参与协作,角色能力匹配是指根据空中目标的距离和自身舰空导弹的射程及编队中的职能角色等进行匹配,匹配规则如下:
Rule1:目标在点防御区内,如果协作时间允许,且空中无其他目标,所有半自治Agent均可参与协作。
Rule2:目标在近程区域防空导弹射程之内、点防御区之外,优先选择具有区域防空导弹且导弹有剩余的舰艇,即区域防空舰Agent参与竞争。
Rule3:目标在远程区域防空导弹射程之内、近程区域防空导弹射程之外,优先选择具有远程区域防空导弹且导弹有剩余的舰艇,即远程区域防空舰Agent参与竞争。
Rule4:目标在远程区域防空导弹射程外,可优先选择具有远程区域防空导弹且导弹有剩余的舰艇,即远程区域防空舰Agent参与竞争。
Rule5:如果导弹的射击禁危区内有我友邻舰,不参与对该目标的协作。
Rule6:因自身状态原因,如无闲置防空通道或导弹剩余为零等情况而无能力参与协作,向指挥舰返回协作失败的信息。
Rule7:指挥舰根据以上原则也需要进行参与协作竞争。
Rule8:多目标下,对威胁程度高的目标优先分配防空火力通道。
根据匹配,形成协作群体Region(),协作群体内各舰修改规划,并上报相关信息:抗击方案(单发或双发等)、导弹的射程、完成抗击的总时间,抗击方案的毁伤概率及抗击所需的武器资源情况等,以上信息构成了参与竞争时的性能指标。本文根据对空防御又快又准地击毁空中目标为原则,主要选择竞争的性能指标有实战能力值Cap、完成抗击的时间T、抗击方案的杀伤概率P。
有了性能指标,下一步就需要确定相应的权重,并按照具体算法计算协作群体内每个半自治防空Agent的竞争优势,由具有最大竞争优势的Agent来执行抗击。由于各个权重具有不确定性,需要融入指挥员的知识经验、期望等偏好信息,因此,偏好信息的获得是解决该问题的关键。
指挥舰直接命令源于编队指挥舰的权威性,在防空作战中,指挥舰处于核心地位,能全面掌握海面和空中动态,因此指挥舰可以直接命令下属防空舰执行抗击任务,即该下属舰直接获得最大竞争优势。指挥舰直接命令的优势在于增加了人的因素,符合了当前编队作战的实际情况,在处理部分问题时,减少协作需要的时间,减少了资源的消耗。
4 多目标时编队区域防空火力的协作决策
现代海战场中,对海上舰艇编队的攻击往往呈现多方向、多批次,因此,在单目标防御的研究基础上,对多目标下的协作决策也作了初步研究。首先作如下定义:
舰艇编队集合A={ag1,ag2,…,agm},即有m艘舰艇组成;
空中目标集合G={G1,G2,…,Gn},G是动态变化的;
威胁系数rj(j=1,2,…,n),rj≥0,威胁判断模型可以采用如下算法[6]:rj=W·T(其中W为编队各舰的权重向量,T为各目标对各舰的攻击概率矩阵,通过雷达情报分析可以得到);
每艘舰艇可有防空火力通道数fi(i=1,2,…,m),fi≥0,当fi=0时,表明无闲置防空通道,即不参与区域防空协作;
各舰剩余导弹数Mi(i=1,2,…,m),Mi≥0,当Mi=0时该舰不参与区域防空的协作。
参考单目标时编队区域防空火力的协作流程,多目标下编队区域防空火力分配决策的协作流程如图2所示。
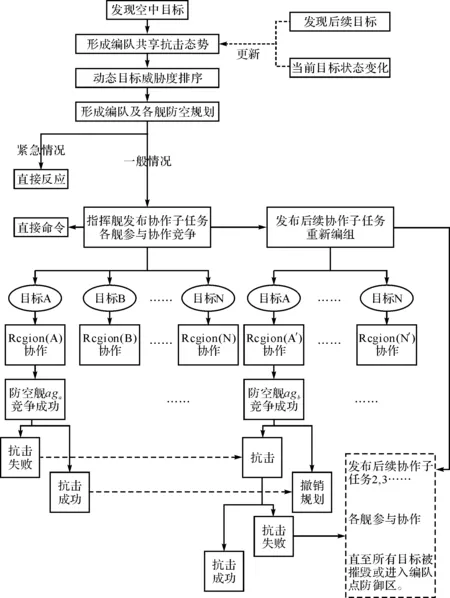
图2 多目标下编队区域防空火力分配决策的协作流程
4.1 模糊多目标决策模型
所谓多目标决策是指在具有相互冲突、不可公度的多个目标情况下进行决策。模糊集理论是解决含有模糊不确定因素的复杂决策问题的有效工具。模糊集理论与多目标决策的有机结合就是模糊多目标决策[7~8]。
训练数据集中有19种特征,其中特征7-13、15-17的值在测试数据集中被隐藏,特征14(Correct First Attempt)为需要预测的分类特征。因此,在训练过程中也排除了特征7-13和特征15-17。我们将剩下的8种非类别特征分为三类,一是与学生相关的特征,即特征2;二是与题目相关的特征,即特征3-6;第三类是与知识点相关的特证,即特征18和19。在对数据样本进行距离度量过程中采用协同过滤算法,把学生当做主体,即协同过滤算法中的客户,将题目和知识点看作与客户相关的项目。
多目标决策过程如下:对于一个由n个决策方案xj(j=1,2,…,n)所组成方案集和m个目标fi(i=1,2,…,m)组成目标集的多目标决策问题,得到决策矩阵F=(fij)m*n。通常情况下,多个目标之间相互冲突,不可公度。同时,在决策过程中,含有决策者的知识经验、判断等模糊经验。为此,需要确定方案xj关于目标fi的优属度μi(xj),简记为μij。目标相对优属度的确定方法很多,常见的有效益型,成本型,固定型,区间型。确定了μij后,则可用多目标决策模糊最优解的若干求解方法进行建模求解。然而,使用这些方法的前提条件是事先知道目标集f的权重向量ωi=(ω1,ω2,…,ωm)T。所以权重的确定就成为解决多目标决策问题的关键所在。
4.2 隶属度线性加权规划方法
隶属度线形加权规划方法是解决偏好信息不完全确知的一种模糊多目标决策方法[9~10],可以假定前P个目标权重是待定的,而后(m-P)各权重是已经给定的,其中0≤P≤m,即
(1)
记
ϖ=(ω1,ω2,…,ωp)T
设决策矩阵F及其目标相对优属度矩阵μ已给定,于是可得方案xj∈X的目标相对优属度线性加权平均综合值为

(2)
显然,对于给定的权重向量ω,ρj(ϖ)越大则xj越优。因此,可以建立下式的多目标决策模型为
由于每个方案都是非劣的,所以它们之间不存在任何优劣关系,具有相同的重要性,于是可将上述多目标决策问题等权重集结为等价的单目标非线性规划,可求解得
(3)
将式(3)和式(1)代入式(2)可得到各个方案的目标相对优属度线性加权平均综合值,并按其从大到小的顺序即得方案集X的优劣排序。
显然,当p=m即偏好信息完全不确知时,有d=1。若偏好信息完全确知即ω已知时,直接利用式(2)便可做出决策。由此可见,隶属度线性加权规划方法同样适用于偏好信息完全不确知和完全确知这两种极端情况的多目标决策问题。
5 实例分析
5.1 情况设定
舰艇编队编成为D1、D2、D3、D4四艘驱护舰,队形为菱形队,D3,D4居两侧。假定本文实例中编队各舰的防空实战能力评价如表1所示,另外表中军事价值权重通常是根据编队各舰在编队中的地位和实际价值由编队指挥员来设定。

表1 编队各舰实战能力值及军事价值权重

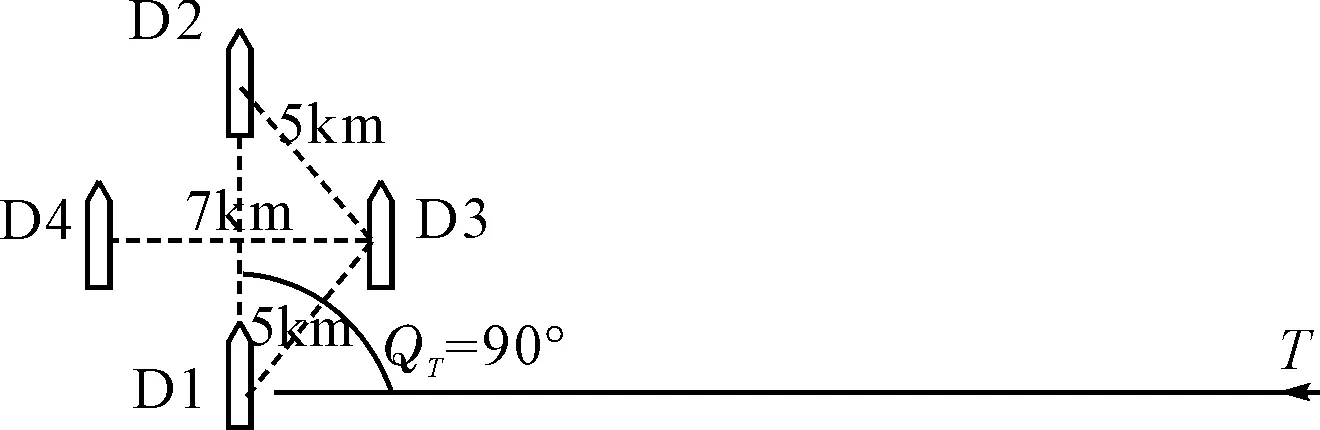
图3 编队对空防御态势图
在执行任务航渡时,敌向我编队共发射三枚反舰导弹,现假设三枚空中目标的属性如表2所示。

表2 空中目标群属性
5.2 实例计算
通过计算,可以得到舰艇编队防空火力的协作抗击流程,如表3所示。限于篇幅,计算过程中假设目标f2、f3为一次拦截成功,目标f1为二次拦截成功。另外,考虑到目标到编队各舰的相对距离虽然不同,但是对的协作及决策的影响较小,因此为便于计算,在计算过程中将编队看作是一个整体,只计算目标至编队的距离,分别用D1,D2,D3表示,不分别计算目标至各舰的相对距离。
1) 威胁度排序
根据表2中的目标属性应用灰色关联度分析,得出三个空中目标的威胁排序如下:f1≻f2≻f3。空中目标状态发生变化,需要对威胁度进行重新排序。
2) 协作群体的形成及演化
指挥舰根据态势发布任务,根据目标距离、威胁程度和舰艇火力通道数对四个目标形成初始的三个动态竞争组Regionf1(),Regionf2(),Regionf3(),随态势变化可以重新演化编组。
5.3 实例分析结论
以三枚超音速反舰导弹从三个方向向我编队进攻为防空态势,模型根据威胁排序和各舰的防空通道数,形成三个动态竞争组,每个竞争组在抗击过程中根据态势的改变而动态演化,直到目标被摧毁或进入点防御区,体现了模型对态势变化的动态适应性。其中对目标的第一次抗击采用直接反应模式,保证了舰空导弹在最远距离上拦截目标的要求,体现了半自治Agent的自主性和对应急问题的处理,减少了决策的时间。另外,在模型中还有编队指挥舰人工干预直接命令一个环节,虽然在实例中没有表现出来,但是也符合目前编队的作战指挥特点,体现了半自治防空Agent的受制性。

表3 多目标下编队防空协作流程
[1] 施帆,缪旭东,阚玉斌.基于模糊理论和多Agent协作的编队对空防御研究[J].海军大连舰艇学院学报(增刊),2008:52-56.
[2] 董建军,钟志通.舰空导弹编队反导拦截决策模型[J].现代防御技术,2001,29(4):20-31.
[3] 贾利民,刘刚,秦勇.基于智能Agent的动态协作任务求解[M].北京:科学出版社,2007:5-10.
[4] Wooldridge M. J, Jennings N. R. Intelligent Agents: theory and practice[J]. KnowledgeEngineering Reviews,1995,10(2):115-152.
[5] Yen, J., Yin, J., Ioerger, T.R., et al. Collaborative agents for Simulating Teamwork[C]//Proceedings of the Seventeenth International Joint Conference on Artificial Intelligence(IJCAI-OI):1135-1142.
[6] 毛昭军,等.基于多Agent系统的舰艇编队防空辅助决策系统[J].系统工程与电子技术,2006,28(11):1704-1708.
[7] 李登峰.模糊多目标多人决策与对策[M].北京:国防工业大学出版社,2003:105-120.
[8] 拓明文.模糊多属性Agent多决策系统及其在企业融资中的应用[D].上海:东华大学,2006:36-42.
[9] 肖胜,尹迪,包磊.一种基于MAS的水面舰艇CGF系统行为模型[J].舰船电子工程,2007,27(3):114-116.
[10] Miller, M., Yin, J., Volz, R.A., et al. Training teams with collaborative agents[C]//Proceedings of the Fifth International Conference on Intelligent Tutoring Systems,2000:63-72.
Model of Decision-making Research Based on MAS in Fleet Collaborative Anti-air Warfare
ZHANG Lei1ZHU Lin2GU Qi1
(1. Naval Command College, Nanjing 210016)(2. Naval Submarine Acadamy, Qingdao 266071)
The collaborative model is studied on formation area-defence and point-defence. The restricted collaborative fashion is adopted in the collaboration of area-defence in which a new idea of collaboration is put forward. Then an arithmetic of "role matching&subjective and objective weight enacting&direct command" is adoped in the collaborative mechanism in which the theory of fuzzy multiobjective decision-making is applied to solve the problem of uncertainty weight. In the point-defence, the automony collaborative fashion is adopted and a collaborative mechanism of plan merging is put forward. Finally, instances are given to analyze the collaborative flow of decision-making on formation air-defence, which are validated rationality.
collaboration, formation air-defence, fuzzy decision-making
2013年8月9日,
2013年9月29日
军队国防预研项目(编号:51306060401)资助。
张磊,男,博士,研究方向:海军合同战斗效能分析。朱琳,男,博士研究生,讲师,研究方向:海军潜艇战术。顾颀,男,博士,教授,研究方向:海军合同战术。
TP391.9
10.3969/j.issn1672-9730.2014.02.006