随机高级Petri网对某型舰载机编队着舰起飞过程的动态仿真*
2014-07-05刘爱东
桂 周 刘爱东
(海军航空工程学院 烟台 264001)
随机高级Petri网对某型舰载机编队着舰起飞过程的动态仿真*
桂 周 刘爱东
(海军航空工程学院 烟台 264001)
舰载机编队着舰是一个典型的动态行为过程,航母甲板可看作是单跑道的降落(起飞)平台。Petri网是对离散事件动态系统进行分析建模的重要工具,利用其动态性可对舰载机编队着舰的进近过程进行描述。文中介绍了几种Petri网的定义,分析舰载机着舰流程,建立进近终端区模型,通过Petri网仿真器模拟动态效果,并给出结果。
Petri网; 舰载机着舰; 终端区模型
Class Number TP391.7
1 引言
1962年联邦德国的卡尔·A·佩特里在他的博士论文《用自动机通信》中首次使用网状结构模拟通信系统。这种系统模型后来以Petri网为名流传[1]。Petri网作为一种图形化、数学化建模工具,能够提供个集成的建模、分析和控制环境,为系统的设计提供便利[2]。Petri网在空中交通流量管理中具有较广的应用前景。
航空母舰是一个单跑道的海上降落(起飞)平台,舰载机着舰回收过程也是空中交通流量管理问题的一部分。空中交通流量管理的主要目的是为了安全、有效使用现有空域、机场资源和空中交通管制服务,保证空中交通量最佳地流入相应空域,尽可能准确地预报飞行情况以减少延误,提高机场、空域的利用率[3]。空中交通流量管理是典型的离散事件动态系统,Petri网理论作为离散事件动态系统的理论工具和仿真工具,早已证明其特有的优越性[4]。航母舰载机类型包括战斗机、直升机、预警机,共用同一甲板。与民航客机陆基降落不同,舰载机航母平台降落在保证安全性,可靠性的基础上,进一步考虑回收效率与起飞效率[5]。本文主要分析某型舰载战斗机着舰过程,并假设所有等待回收的舰载机符合着舰条件,在此基础上利用Petri网原理建立进近终端区模型并进行仿真优化,指出了随机高级Petri网在舰载机着舰过程中的应用。
2 Petri网原理及随机高级Petri网
定义1[4]六元组N=(P,T,F,M0,K,W)满足下列条件时,称为Petri网:
1) (P,T,F)是网,其中P是位置的集合(也称库所集),T是变迁的集合,F是关系的集合;
2)K是集合P到自然数的映射,K:P→N(N为自然数);
3)W是关系集合F到自然数的映射,W:F→N;
4)M0是初始标识。
由Petri网表示的图称为Petri网图。通常情况下,一般用“○”表示条件(位置)结点,用“▭”或“|”表示事件(变迁)结点,变迁结点之间、位置结点之间不能有有向弧,变迁结点与位置结点之间用有向弧连接,由此构成的有向二分图称作网。网的某些位置结点中标上若干黑点(token),从而构成Petri网。带标记的位置用“⊙”表示该条件成立,6元组中的M0称为初始标示,对应于初始配置,表示系统的初态[6]。

图1 Petri网
标示在Petri网中的变化遵循一定的规则——变迁规则: 1) 一个变迁,如果它的每一个输入库所(库所到变迁存在有向弧)都包含至少一个标记,则是使能变迁; 2) 一个使能变迁的激发,将引起其每个输入库所中标记减少,而每个输出库所(变迁到库所存在有向弧)中增加标记[7]。
定义2[4]高级Petri网HLPN由以下元素组成:
1) 一个有向偶图(P,T,F);
2) 一个由某些类型的个体标记(OKi)、某些操作(Opi)和关系(fi)组成的集合;
3) 一组表达式。每条弧上的表达式是具有n个属性的标记变量的形式和∑;
4) 在某些变迁上的一组谓词,由∑中的操作和关系及变迁的输入(输出)弧上出现的标记变量所构成的逻辑表达式;
5) 一个初始标识,每个位置包含这具有n个属性的个体标记中的若干个标记;
6) HLPN的运行规则:每个变迁的实施是按其每条输入(输出)弧上表达式的要求,将一些标记从输入位置移到输出位置中。
一个变迁是使能的需要满足以下两点: 1) 每个输入位置中包含所需的足够数目的个体标记; 2) 将个体标记赋给变量,使该变迁上的谓词为真。
定义3[4]一个连续时间随机高级Petri网(SHLPN)是HLPN网的扩充,即在HLPN的基础上加入一个平均的变迁实施速率的集合λ,λ={λ1,λ2,…,λn}。
λi是变迁ti的指数分布参数,表示它的平均实施速率,1/λi称为平均实施时间或平均服务时间。
3 某型舰载机着舰过程分析及终端区Petri网建模
航母甲板是单跑道的海基降落平台,所有舰载机在着舰过程中有着严格的标准和着舰流程。不同的舰载机着舰方式不同,这里仅讨论国外某型舰载战斗机(下文简称舰载机)的着舰过程。
舰载机编队在执行完任务返航时,需向母舰航空管制系统通报高度、速度、方位及飞机状态参数,飞行指挥员据此从航管中心获取编队各架机的预计返航时间等信息,领航战位向航空管制系统提供预计允许着舰时刻,飞行指挥战位负责决定回收类型,向航空管制系统通报,利用塔台领航保障工作台从作战系统获取着舰舰载机机型等信息,设置相应着舰设备参数[8]。
舰载机编队进近飞行,在距母舰约200海里处,由预警机进行导航,处于进近管制移交点,此后进入进近阶段,并以一定的下降率下滑至平台点后,减少下降率并对正着舰航向,下降至一定高度后进入着舰构型点,此时距母舰约12海里,随后舰载机编队进入最后进近阶段,保持至距母舰3海里,进入标准下滑点,以一定角度、时速下滑至母舰上着舰引导灯光可视范围后,进入着舰引导阶段直至着舰成功;若不符合着舰构型,着舰指挥员发出复飞信号,舰载机转入复飞航线,航线高度与下滑点之前高度基本一致[9]。图2表示舰载机着舰过程的各个阶段与几处关键点[10]。

图2 舰载机着舰过程
用随机高级Petri网对上述过程进行建立模型,如图3所示。图中,按照舰载机所处不同关键点,将着舰和起飞离舰过程分为p1~p12个位置结点;t1~t12表示着舰离舰过程中飞机所处关键点的改变;λ1~λ12表示相应ti的实施速率;带标记的p1表示有一架舰载机进入进场管制空域,准备着舰流程;带标记的p13表示航母甲板已清空可使用,各设备准备完毕,允许降落/起飞;带标记的p14表示在舰载机开始着舰构型和起飞离舰阶段进行近场空域管制,不允许其他舰载机有着舰/起飞动作,待着舰完毕/起飞离场阶段结束后取消管制,允许后续动作;t5输出概率弧,其中a表示成功着舰的概率,1-a表示着舰失败转入复飞航线的概率。
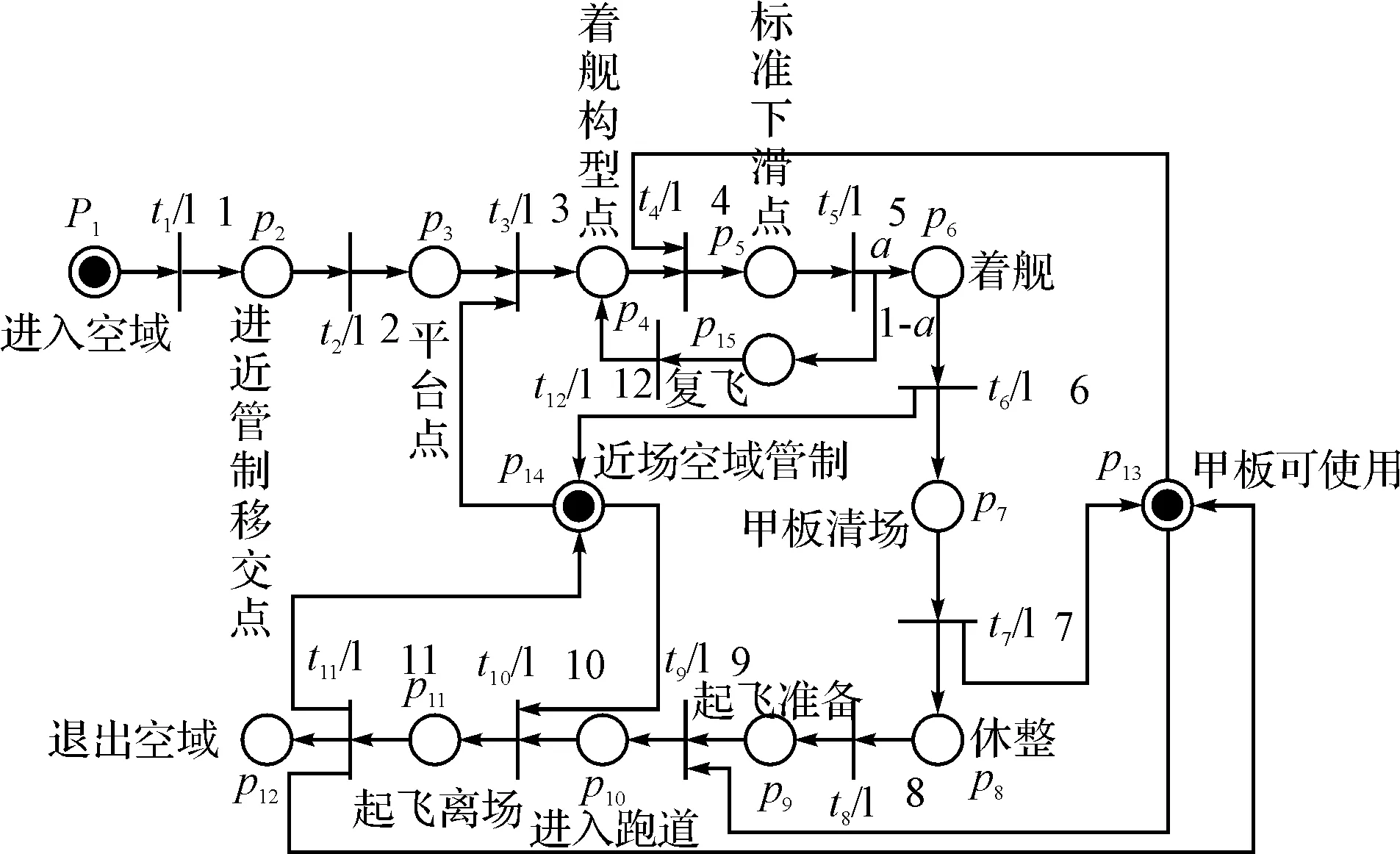
图3 着舰终端区Petri网模型
该Petri网模型动态模拟过程可描述如下:p1有标记,条件成立,经1/λ1时间到达进近管制移交点,1/λ2时间到达平台点后,p14中有标记,表示母舰已为该机清场,进行近场管制,允许其降落,转入着舰构型点完成构型,并等待指挥员通知甲板上各战位情况,在甲板准备完毕条件下舰载机开始下滑着舰(否则盘旋等待),以概率a成功着舰后(1-a的概率进入复飞线等待下次降落),甲板人员立即进行清场工作,同时指挥员取消之前为该机申请的近场空域管制,清场完毕对p13做标记通知甲板可使用,在经历休整、起飞准备阶段后,移除p13中标记,占用甲板,待飞舰载机进入跑道,并申请近场空域管制,移除p14中标记,待起飞离场后对p13、p14重新标记,表示甲板可使用,取消舰载机起飞近场空域管制。
需要指出的是,在上述模型中存在两处冲突的地方: 1) 在甲板可使用的条件下,一架舰载机待降,一架待起飞,这时就存在争用甲板的冲突; 2) 在无近场空域管制的条件下,空中待降战机和跑道待起飞战机存在争用近场航空管制的冲突。文献[2]中指出,高级Petri网中,可以采用给变迁加谓词的办法解决冲突。可在上述模型中根据实际情况,给变迁赋予不同优先权来解决冲突,即当空中待降战机处于紧急状态,如剩余油量不足、飞机战损、飞行员身体状态较差等,此时应优先赋予t3、t4实施权,待着舰事件完成后再允许起飞;当战时有紧急作战任务,战机需立即升空时,应赋予待起飞战机优先权,即t9、t10优先实施。
4 终端区模型仿真
利用Visual Object Net++ Petri网仿真器对上述Petri网模型进行仿真,在不考虑编队内两架战机间飞行间隔前提下,设置模型主要参数如表1所示。
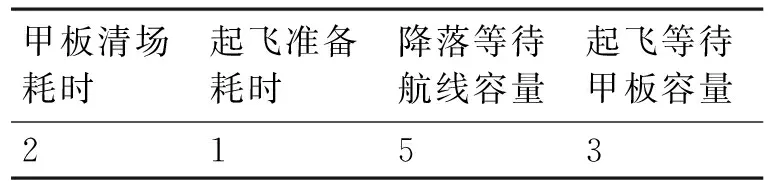
表1 模型仿真参数设置
仿真器中,初始参数设置:P1的托肯值(token)对应于等待降落战机数量,容量(capacity)设为00,表不限;p2、p3、p5、p6、p10、p11、p15容量值设置为1,表示关键点只允许一架战机活动;p13、p14托肯值1,分别表示单跑道和空域管制唯一,不可争用;p4容量值5,表示等待航线最多允许5架战机盘旋;p9容量值3,最多对三架战机做起飞前准备;其余容量值不限,表示战机均可实施行为;对t7设置延迟时间2,表示甲板清场耗时2;对t9设置延迟1,表示准备起飞耗时1(注:仿真需要,设置1为单位时间)。
仿真结果表明,通过同时设置甲板和空域管制托肯值,既保证了战机安全,也很好地解决了降落、起飞时争用资源的问题。依次设置p1托肯值5、10、20、30,仿真发现所有战机均能顺利完成降落、起飞等一系列动作,避免了稀有资源争用的问题。所建模型很好地模拟了舰载机着舰离舰过程,下一步将在航母甲板使用效率上,利用上述Petri网模型进行仿真分析。
5 结语
文中对舰载机着舰过程进行了描述,利用随机高级Petri网原理建立舰载机着舰终端区模型,通过给变迁添加谓词赋予其不同优先权的方法来解决舰载机着舰过程中甲板冲突和空域管制冲突,最后利用Peri网工具对终端区模型进行定量仿真实验,结果证明所建模型能很好地模拟舰载机着舰起飞过程。
[1] 陈江红,李宏光.基于Matlab环境的Petri网的仿真方法[J].微计算机信息,2003,19(12):103-105.
[2] 袁崇义.Petri网原理与应用[M].北京:电子工业出版社,2005.
[3] 胡明华.空中交通流量管理理论与方法[M].北京:科学出版社,2010.
[4] 黄圣国,等.随机高级Petri网在空中交通管理中的应用[J].南京航空航天大学学报,1994,11(26):81-87.
[5] 刘相春,卢晶,黄祥钊.国外航母舰载机出动回收能力指标体系分析[J].中国舰船研究,2011,6(4):1-7.
[6] 方胜良,邓宝,赵大志.Petri网理论在指挥自动化系统建模上的应用[J].电子对抗技术,2003,2(1):27-30.
[7] 林琳,等.基于广义随机Petri网的交通信息系统建模与分析[J].计算机学报,2005,28(1):81-87.
[8] 焦方金,等.浅谈舰载战斗机的降落[J].舰载武器,2005(6):82-85.
[9] 薛雯,江驹,姬猛,等.舰载机进近着舰方式及主要影响因素的研究[C]//中国制导、导航与控制学术会议论文集.上海,2010:56-59.
[10] 王廷刚,屈香菊.舰载机进舰着舰过程仿真建模[J].系统仿真学报,2008,20(24):6592-6598.
Dynamic Simulation of Aircrafts’ Landing and Take-off Process with Stochastic High-level Petri Net
GUI Zhou LIU Aidong
(Naval Aeronautical Engineering Institute, Yantai 264001)
Aircrafts’ landing is a typical dynamic behavior process. The aircraft carrier deck can be seen as a landing(take-off) platform with single runway. Petri net is an important tool to mode and analyze the discrete event dynamic system, describing the aircrafts’ process approach based on its dynamic nature. In this paper, several Petri net definitions are introduced, the aircrafts’ process approach is analyzed, an approach terminal area mode is built. Using Petri net simulator to simulate the dynamic effect and results are given at last.
Petri net, aircrafts′ landing, terminal area model
2014年6月13日,
2014年7月29日
桂周,男,硕士研究生,研究方向:计算机应用。刘爱东,男,教授,硕士生导师,研究方向:嵌入式开发。
TP391.7
10.3969/j.issn1672-9730.2014.12.022