一种模块化水下机器人的设计
2014-07-04金碧霞
金碧霞
(中国船舶重工集团第七一○研究所,湖北 宜昌443003)
0 引言
中船重工第710研究所研制开发的某探测型水下机器人,其配置有3个导管螺旋浆,用以实现水下机器人的潜浮、进退和转弯等水下空间运动。搭载有高分辨率图像声纳和水下电视,用于目标搜索和识别。装备有深度计、磁罗经和声应答器等先进传感器,实现水下机器人的导航运动控制。采用光电复合脐带电缆供电和传输通讯及信号。该机器人是一种小型ROV,能够从各种支持平台上布放。主要用于湖泊河道和近海等水域,完成水下观察、水下记录和水下搜索等水下作业任务。
1 方案制定
没有一种能完成所有任务的全功能机器人,因此,首先要依据任务使命和工作环境,构建系统的软硬件体系[1]。机器人要在湖泊河道等狭小水域中工作,就要求其在满足耐压、水密、负载和速度的前提下,具有体积小、运动灵活的特点。而机器人要完成探测和打捞任务,就需要在有限的空间装载多种传感器来进行目标识别、环境探测。整个机器人是一个整合了探测识别系统、动力推进系统和综合控制系统的大系统。这就要求有完善的系统集成设计和电磁兼容设计,才能确保控制与通讯信息的畅通,以提高机器人的可靠性[1]。
综合考虑,将机器人采用模块化设计思想,按各功能模块分为探测识别舱段、动力推进舱段、控制舱段和艉部去流舱段。各舱段采用O型橡胶密封圈径向密封,通过螺钉连接组成水下机器人的回转体流线型外形,以减小水流阻力,降低能耗。舱段连接方式如图1所示。
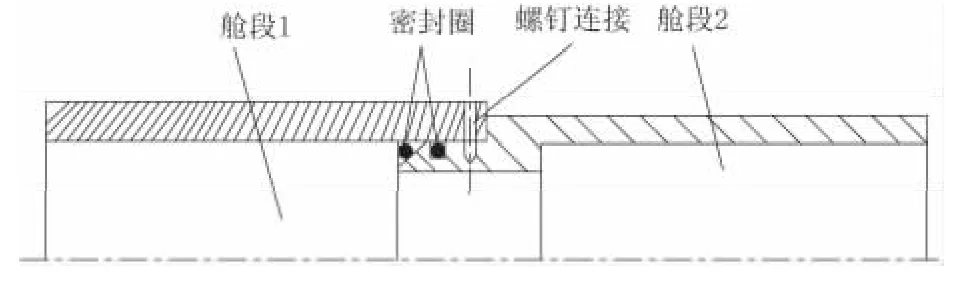
图1 各舱段的连接
2 舱段设计
探测识别舱段又称艏部迎流舱段,为水密半球形。动力推进舱段、控制舱段为圆柱形水密筒体,艉部去流舱段为非水密的圆锥形。水密舱采用高强度的铝合金材料制作,壳体成型后进行阳极氧化、铬酸盐封闭处理。非水密舱段采用重量轻、成形方便和修理容易的玻璃钢材料制作。在机器人壳体外表面涂覆防腐油漆,以提高耐海水腐蚀能力。
2.1 探测识别舱段
探测识别舱段主要装有高分辨率图像声纳和水下电视,为了更好地观察识别目标,在舱内还设计有一套俯仰机构,可以使探测识别组件在-90°~45°的纵截面(垂直面)角度内进行俯仰动作。为保证舱段不因自重而下垂,俯仰机构采用带有自锁功能的蜗轮蜗杆传动,并用电位计作为角度检测传感器,俯仰角度信息可在水面控制台屏幕上显示,以方便操作人员对水下机器人进行操纵和控制。图像扫描声纳可在低能见度的水体中对周围环境进行声学扫描,用于水下目标识别、避障或者水下目标声成像。声纳通过机械旋转实现声学扫描声纳,可进行声学放大、及时反转和扇区扫描。软件可对发射频率、增益、声纳作用距离、扫描扇区和速度/分辨率等进行设置。水下电视包括1个摄像机及2个照明灯。其中2个照明灯以向下约30°的角度固定布置在摄像机两侧,可随俯仰机构在纵截面内转动,保证近距离识别时对水下摄像机视场的覆盖。
2.2 动力推进舱段
动力推进器采用模块化设计,通过电机直接驱动导管螺旋浆转动。由推进电机、连接架、螺旋桨、导流罩和传动轴等组成。动力推进器结构如图2所示。机器人的水下潜浮、进退和转弯运动是通过2个水平推进器和1个垂直推进器组合配置方式来实现的,其中水平推进器以外挂方式布置在航行体左右两侧,垂直推进器以槽道的方式布置在舱段中间一个贯穿的筒体内。控制3个导管螺旋浆的正转、反转、差速和同速转动,从而实现机器人的水下空间运动。当左右2个螺旋浆以相同转速同向转动时,可实现机器人沿直线前进或后退;当左右2个螺旋浆以相同转速反向转动时,可实现机器人原地转动;当左右2个螺旋浆以差速转动时,可实现机器人转弯。垂直螺旋浆可实现机器人水下下潜和上浮。推进器电机控制板安装固定在动力推进舱内,通过水密插座和水密电缆与舱外进行电气连接。

图2 动力推进器结构
2.3 控制舱段
控制模块是水下机器人的大脑,它担负着水下机器人的控制命令的发送,反馈状态信息的接收以及各种数据的处理等重要信息。控制模块采用分布式控制系统,分为水上模块和水下模块。水下模块主要包括中央控制单元、传感器单元和通信单元。
中央控制单元是水下机器人的控制核心,实时接收操控台的指令并按照指令控制各执行部件。控制软件主要包括多媒体视频显示、串行通讯、数据采集与处理、I/O控制、航向控制、深度控制和安全性控制等模块。控制硬件采用PC104总线计算机,在其运行Vx Works嵌入式操作系统,以实现系统实时性和遥控操作性[2]。通过A/D采集接口接收水下航行体各传感器信息,通过数字量输入接口采集电机各状态参数,所有水下航行体状态参数经微处理控制器处理后,通过通讯接口送至水面显控台显示。采用D/A接口电路来控制各推进电机。执行机构控制电路主要用开关量输出驱动继电器的方式,来控制各执行机构的动作。机器人的水下控制系统硬件组成如图3所示。
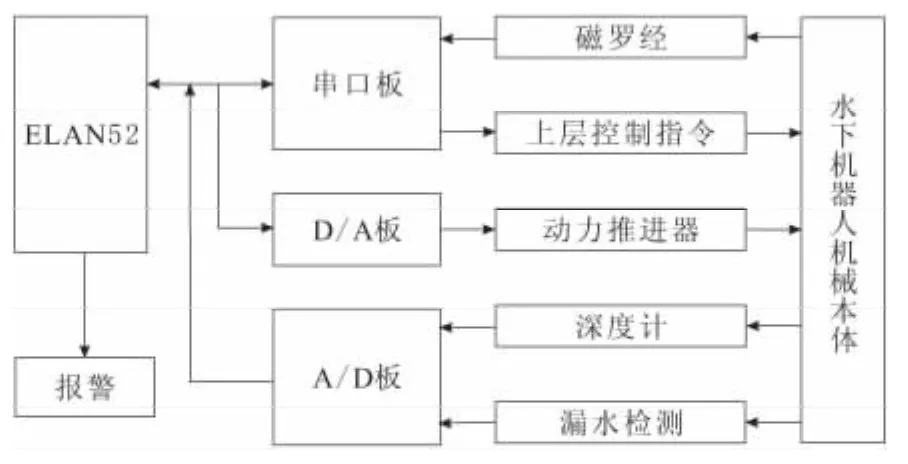
图3 水下控制系统硬件组成
传感器包括2种类型,测量运行状态的传感器(深度计、磁罗盘和声应答器)和测量自身安全的传感器(漏水检测器)。选择高精度压力传感器作为深度检测设备,利用深度偏差信号作为深度控制系统的主控信号。深度控制系统采用经典的PID调节方法,通过参考模型对其进行参数整定。为提高航向的控制精度,增强抗干扰能力,采用闭环航向角控制,航向角的检测传感器选择磁罗经。主平台通过自身的声纳询问安装在航行体背部的应答器,实现航行体的跟踪和定位。
水下机器人的耐压舱不仅用来装载电子功能设备和传感器,还要提供机器人航行时的浮力,因此,要有可靠的密封。为保证机器人正常工作和航行安全,在每个舱段均设计有漏水检测器。漏水检测器分别接在不同的I/O端口,控制台可具体地判断每个模块舱的安全情况,提高了检测效率。
2.4 艉部去流舱段
水下机器人在水中运行时,不可避免地会受到水体粘性阻力的影响,不利于水下机器人低阻力、高效率的空间运动[3]。所以减小行进阻力及动力消耗是设计中的一个主要关键点。艉部去流舱段与艏部半球迎流舱段、舯部圆柱舱段组成水下机器人的流线型外形。为保证机器人的水中运行平稳,在壳体外表面配置有4个稳定翼板,成“十”字形布置。
3 通讯及信号传输
机器人的通讯及信号传输由存储在电缆绞车上的光电复合脐带电缆来完成,同时光电复合脐带电缆也传输航行体所需的电力。光端机是信号传输的枢纽,光端机将视频信号、声纳信号和机器人的各种状态信息进行调制处理,并转换为光信号,通过光电复合脐带电缆内的光纤传输到水面控制台,由光纤通讯装置转换为电信号,在水面控制台屏幕上显示。同时,光端机也接收水面控制台光纤通讯装置发送来的光信号,并转换为电信号送给航行体水下控制单元以实现对机器人的水下运动控制。机器人通讯及信号传输如图4所示。

图4 通讯及信号传输
4 结束语
2011年,分别在湖北清江和漳河水库对模块化设计的探测型水下机器人进行试验。将一个模拟目标预先用浮标吊挂在水下,操纵水下机器人到达预定水域,当声纳搜索探测到可疑目标后,操作人员在声纳的导引下,操纵水下机器人进一步接近目标点,并利用声纳或水下电视观察识别目标。试验取得了令人满意的结果,该水下机器人有良好的机动性,能满足进行水下作业所需的运动控制要求,所采集到的数据也能较好地反映目标的实况。
[1] 徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2011,33(3):125-132.
[2] 孙玉山,庞永杰,万 磊,等.堤坝检测水下机器人GDROV方案研究[J].船海工程,2006,(1):84-86.
[3] 宋思利,刘甜甜,康凯灿,等.自主水下机器人机械结构设计与实现[J].机器人技术与应用,2012,(4):29-31.
