基于支持向量机的开关磁阻电机转子位置在线建模
2014-07-04司利云林辉
司利云, 林辉
(1.长安大学 电子与控制工程学院,陕西西安710064;2.西北工业大学 自动化学院,陕西 西安710072)
0 引言
开关磁阻电机驱动系统(switched reluctance motor drive system,SRD)以其结构简单、工作可靠、效率高和成本较低等优势,成为工业应用中比较理想的电机选择,最近其作为最有可能进入电动汽车和混合电动车辆市场的主流产品而备受关注[1]。SRD是位置闭环系统,获取转子位置信号的传统方式是采用机械式位置传感器直接检测。位置传感器的存在削弱了SRD结构简单的优势,降低了系统高速运行的可靠性。因此,探索取消位置传感器的转子位置间接检测方法成为SRD研究的一个热点。
近年来许多学者都对该问题进行了探讨,提出了各种可行的方案[2]。这些方案大都利用了电机可测的电气参数与转子位置之间存在的函数关系,基于这种函数关系解算出转子位置信息,其中最有代表性的便是使用如模糊逻辑[3]、神经网络[4-5]或支持向量机[6-7]等人工智能法间接获取转子位置信号,但是这些方法大都使用离线获取的磁化特性曲线进行学习,所建立的离线模型在实际工程应用中,由于电机的运行状态会出现不规律的变化,并且存在各种干扰因素,使得所建立的离线模型无法满足电机的工程应用要求[8]。基于此,为了使所建立的转子位置估计器模型能够更加准确地描述电机的运行状态,目前有两种解决思路,一种是设计模型的在线调节方法,对离线模型进行在线学习和调节。如文献[8]首先利用基于径向基函数的神经网络建立开关磁阻电机的离线模型,然后在电机实际运行过程中,根据估计磁链和实际磁链的误差,实时地调整神经网络的输出权值,使得经过在线调整的磁链模型更加准确地描述电机的磁链特性;另一种则是直接使用在线建模技术对转子位置进行实时预测。如文献[5]建立了转子位置检测的神经网络模型,并给出了模型的在线学习算法和训练步骤,采用TMS320F2812 DSP实现神经网络在线训练算法,开发完成了一台15 kW三相12/8极无位置传感器SRD样机。实验结果表明,无位置传感器SRD具有较好的动态特性和较高精确度。本文将从在线建模的角度出发,将只受极少数的相关数据点(支持向量)的影响,且计算量较小的支持向量机模型作为研究的重点,研究利用开关磁阻电机实际运行过程中获取的磁特性数据建立转子位置估计器的在线预测模型。
1 支持向量机在线建模原理
系统实际运行过程中得到的数据集会随着时间的推移及工作区域的变化而动态改变,从而使得建立的在线模型也是动态变化的。
假设系统当前的状态主要由过去时刻到当前时刻的l组数据来描述,这个区域段的样本集为{(x1,y1),(x2,y2),…,(xl,yl)}∈Rn× R,当前系统的建模信息便从这l组数据中得到。随着系统的运行,系统状态的不断改变,新的数据不断得到,要使模型能准确的反映系统的当前状态,就要用新的数据集来描述模型。通常使用的建模过程如下[9]:
1)选择适当的支持向量回归机模型;
2)以{(x1,y1),(x2,y2),…,(xl,yl)}∈Rn× R为训练样本集建立系统模型;
5)若误差在允许的范围之内,则l←l+1转3);
6)否则便转2),将采集的数据加到训练样本集中,在新的数据集上重新建立模型。
有别于离线建模对支持向量回归机模型的要求,在线建模除了希望模型具有良好的逼近精确度,还希望模型的训练算法具有较快的收敛速度,以便满足在线建模对实时性的需求。
目前在线建模使用最多的模型可分为两类:一类以标准支持向量回归机模型(standard support vector regression,SSVR)为代表[10-12];另一类以最小二乘支持向量回归机模型(least squares support vector regression,LSSVR)为代表[13-15]。前者由于要求解二次规划问题,所以需要的训练算法比较复杂;后者只需求解一组线性方程组,算法简单快速,但其解却丧失了稀疏性。为了寻求一种适合电机实际运行特性的在线建模算法,本文将探讨基于灰色关联的加权分类近似支持向量回归机模型来进行转子位置估计器的在线建模。
2 基于灰色关联的加权分类近似支持向量回归机模型
2.1 分类近似支持向量回归机模型
近似支持向量机(proximal support vector machine,PSVM)是由 Fung和 Mangasaran提出的一种解决分类问题的变形支持向量机[16]。其通过将标准支持向量机的损失函数由一次改为二次,并在目标函数中加入偏移项b2,使目标函数成为强凸函数,算法的收敛速度比标准支持向量机要快得多;另外其将约束条件由不等式约束变为等式约束,不需要求解二次优化问题,大大降低了求解的难度。本文又借鉴了文献[17]提出的分类支持向量机的思想,通过样本集因变量的上下平移将回归问题转化为二值分类问题,将近似支持向量机的分类算法推广到回归问题中,得到了分类近似支持向量回归机模型(proximal support vector regression via classification,CPSVR),其对应的优化问题为
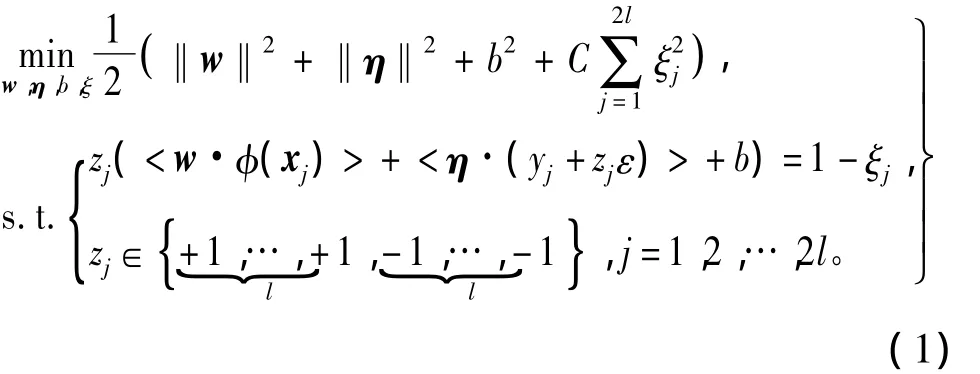
式中:(w,η)为超平面的权向量;b为偏置;非线性映射φ(·)将输入空间的样本点映射到一个高维的特征空间(Hilbert空间);<·>表示向量内积;ξj为松弛变量(也是回归误差项);C为惩罚因子;ε为容许误差;zj为类别标签,取值为+1或-1。
利用对偶理论得到对应的线性方程组为

式中:aj1和 aj为 Lagrange乘子;K(xj,xj1)为核函数,K(xj,xj1)=〈φ(xj)·φ(xj1)〉,其中 xj,xj1为训练样本集中的任意两个样本。
求解上述方程组,得到CPSVR对应的非线性回归函数为

式中核函数K(xj,x)中xj为训练后得到的支持向量样本,因为该模型的解丧失了稀疏性,所以训练样本便全部成为支持向量;x为测试集中的样本。


测试结果如表1所示。

表1 模型在标准数据集上的测试结果Table 1 Model test results on the standard data set
从表1中可以看出,CPSVR与SSVR和LSSVR相比,所需的训练时间短,预测精确度高。虽然其解与LSSVR一样都不具备稀疏性,但预测精确度上有了较大的提高;所以从预测精确度与收敛速度两方面考虑,CPSVR用于在线建模是不错的选择。
2.2 基于滚动时间窗的加权分类近似支持向量回归机
上述模型由于只需求解线性方程组,所以计算简单快速,但由于其解不具备稀疏性,不存在支持向量,如果直接用于在线建模,随着时间的推移,可能会导致训练样本集的无限扩大,引入较多的冗余信息,所以借鉴文献[12]提出的加权滚动时间窗的做法,固定训练样本集合的大小,构造滚动时间窗获取动态建模所需的数据集,并对滚动时间窗内的数据分配不同的权值h以反映样本对模型的重要程度,这样便可使模型随着时间窗的滚动在线更新,数据容量不会随着时间的推移而过分增大。
基于上述思想,本文对分类近似支持向量回归机模型进行了修正,采用给误差项ξj增加权值hj(h1,…,hj,…,hN分别对应时间窗内的 N 个样本的权值)的方法来决定区间中N个样本的重要性。由此得到加权分类近似支持向量回归机模型(weighted proximal support vector regression machine via classification,WCPSVR)。
给定从t时刻开始的N区间内的样本数据集{(x1,y1),(x2,y2),…,(xl,yl)}∈Rn× R,WCPS-VR对应的优化问题为

利用对偶理论得到如下的线性方程组,即

求解上述方程组,得到WCPSVR对应的非线性回归函数为

2.3 基于灰色关联的权值选取方法
对于时间窗内训练样本的权值选取通常是根据采样时刻的远近来决定权值的大小,认为采样时刻越远的样本与预测样本的相关性越小,在预测模型中所占比重越小,而采样时刻越近的样本越重要,在模型中所占的比重越大,可用下面的加权函数[12]来实现,即

其中,τ为人为给定的参数,小的τ值可减少历史数据的存储,加快训练速度。
从开关磁阻电机的运行方式来看,这种权值选取方法并不是非常合适,因为电机运行时,相电流与相磁链呈周期性变化,电流的上升沿与下降沿比较陡峭,假设当前的预测样本比较接近波谷,从时间上看离该预测样本较近的应是同一个波的波顶数据,而前一个波的波谷数据则由于采样时刻较远而得不到重视,但从电机运行方式来看,应该是物理特性比较相近的数据对预测结果更有意义,因为这些样本可能具有极为相近的相电流、相磁链及转子位置角,所以对波谷样本的预测而言,时间上距离较远的波谷数据应给以更大的权重。基于此,本文将使用灰色关联度来决定权值。
灰色关联分析[18]是研究系统中多个因素之间相互作用、相互关联的一种统计方法,当系统内存在复杂的相互影响,在其效果、结构、整体性能、优劣度、权重等方面所吸收与采用的信息不明确、不完整时,它是一种有力的定量分析工具。在某些方面与支持向量机方法有着相同的前提,如都是针对信息残缺或贫乏的系统,所以在支持向量机的贫信息背景下引用灰色系统的理论与方法,理论上是可行的。
设系统的特征序列(参考序列)为V0={v0(1),v0(2),…,v0(n)},相关因素序列(比较序列)为Vj={vj(1),vj(2),…,vj(n)},其中 j=1,2,…,m。灰关联系数γ(v0(k),vj(k))定义为


那么序列V0与Vj灰关联度γ(V0,Vj)为

灰关联空间(V,Γ)是距离空间与点集拓扑空间的融合,其中V表示灰关联因素序列集,Γ是灰关联映射集。在上式中,|v0(k)-vj(k)|是距离测度,Δmin与Δmax是vj(k)与v0(k)的比较环境,也是vj(k)的领域,包含了点集拓扑的信息,ρ的作用在于调节比较环境的强弱。
灰关联度便是所寻求的预测样本(参考序列)与滚动时间窗内的训练样本(比较序列)之间的权值关系hj,其通过反映样本之间在空间距离上存在的相互关系,强调了样本的物理相似性。
3 基于灰色关联的WCPSVR在线转子位置预测模型的性能测试
3.1 在线转子位置预测模型的建立
获取电机运行过程中某一时刻的相电压Uj、相电流ij及转子位置信息θj,由式(9)计算对应的相磁链值 ψj,即

式中:R为相绕组的电阻;j=1,2,…,N;T为采样周期;N为测量点个数。若已知从时刻0到时刻TN内每个采样点的电压Uk和电流ik以及时刻0的初始磁链ψ0,便可得到当前时刻的磁链ψj。
以电流 ij及磁链 ψj作为自变量 xj,θj为因变量,WCPSVR作为支持向量回归机模型,按以下步骤建立在线转子位置预测器。
1)取N区间测量数据组成训练样本集{(x1,θ1),…(xj,θj),…,(xN,θN)}∈R2× R,用归一化处理方法对数据进行校正与预处理;
2)设定初始参数值。核函数采用径向基函数,σ=0.1,容许误差ε取为θ的线性函数ε=0.008θ,C=1 000;分辨系数ρ=0.75;对WCPSVR进行训练,建立转子位置θ的预测模型;
4)若误差在允许的范围之内,则l←l+1转3);
5)否则便转1),让采集的样本进入滚动时间窗内,时间窗进行滚动,丢弃权值最小的样本,并重新建立转子位置估计器模型。
3.2 模型的测试结果及性能分析
以一台3 kW 12/8极的开关磁阻电机为研究对象,其额定输入电压为三相交流电380 V/50 Hz,额定转速为1 500 r/min,调速范围为100~2 000 r/min,功率变换器主电路采用不对称半桥线路,控制方式选为电压PWM控制加电流斩波控制,导通角为0°到 15°。
获取电机不同运行工况下的相电流、相磁链及转子位置信息,其中,相电流信号通过电流传感器获取,转子位置信号通过机械位置传感器获取,建立在线转子位置预测模型,即

图1为负载1 N·m情况下转速为1 500 r/min时在线转子位置预测模型的测试结果。经过实验测试发现,当训练样本集(×代表训练样本点)的固定长度N=40,能够覆盖相电流(图1(a))与相磁链(图1(b))的上升段后,便可对随后采集的预测样本获得较高的预测精确度(图1(c)),最大绝对误差值为 2.194 5°,平均绝对误差值为 0.115 9°;图1(d)给出了实测的转子位置角及对应的较大预测误差值的分布情况,可以看出,在换相位置附近,由于相电流与相磁链的波动比较剧烈,模型的预测精确度会比较低。

图1 负载1 N·m转速1 500 r/min时模型的测试结果Fig.1 Model test results under load 1 N·m and speed 1 500 r/min
图2为负载10 N·m情况下转速为800 r/min时在线转子位置预测模型的测试结果,当训练样本集(×代表训练样本点)的长度N=48,可以覆盖相电流(图2(a))与相磁链(图2(b))的上升段后,便可获取比较满意的预测精确度。这表明转子位置估计器模型具有良好的泛化能力。图2(c)给出了预测样本的误差曲线,其中最大绝对误差值为2.616 3°,平均绝对误差值为0.311°;图2(d)给出了较大的预测误差值对应的转子位置角的分布情况,同负载1 N·m情况下相似,在换相位置附近,即在0°与15°附近,模型的预测精确度较低。主要原因是由于这个阶段数据波动比较剧烈,固定长度的训练样本集不可能很好的体现这个阶段的数据特征,从而不能获取较好的预测效果。

图2 负载10 N·m转速800 r/min时模型的测试结果Fig.2 Model test results under load 10 N·m and speed 800 r/min
4 结语
针对开关磁阻电机离线转子位置估计器在实际工程应用中存在的预测精确度较差、甚至在某些情况下失效的不足,本文研究了在线转子位置预测技术。这种技术需要充分考虑电机的实际运行情况,并根据其运行方式及特点,建立快速的且高精确度的转子位置估计器模型。基于上述前提,本文提出了基于灰色关联的加权分类近似支持向量回归机。在标准数据集上的测试结果表明该模型具有较快的收敛速度与较高的预测精确度。基于灰色关联度的在线滚动时间窗内训练样本的选取方法,由于考虑了样本间的空间与时间关系,使得只需很小的训练样本数目,便可实现位置的准确估计,这也表明了该模型具有良好的泛化能力。
但是由于在线建模方法的训练样本集需要真实准确的转子位置信息,在模型性能验证的初期,可以使用机械位置传感器来提供这个信号,验证模型的预测精确度。但在后面的在线建模方法实用化过程研究中,这种位置信号的获取方法无疑是不可行的,那么,用什么方法获取在线建模所需要的能够替代真实的精确转子位置信号,这将是在线建模所必须解决的一个问题及后续工作的重点。
[1] 王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1995:1-50.
[2] 邓智泉,蔡骏.开关磁阻电机无位置传感器技术的研究现状和发展趋势[J].南京航空航天大学学报,2012,44(5):611-620.
DENG Zhiquan,CAI Jun.Research Status and development trends of sensorless techniques of switched resultance motor[J].Journal of Nanjing University of Aeronautics& Astronautics,2012,44(5):611-620.
[3] CHEOK A D,ERTUGRUL N.High robustness and reliability of fuzzy logic based position estimation for sensorless swtiched reluctance motor drives[J].IEEE Transactions on Power Electronics,2000,15(2):319-334.
[4] 张旭隆,谭国俊,蒯松岩,等.磁链模型的双开关磁阻电机无位置传感器控制[J].电机与控制学报,2011,15(11):55-60.
ZHANG Xulong,TAN Guojun,KUAI Songyan,et al.Sensorless control of double switched reluctance motor based on flux model[J].Electric Machines and Control,2011,15(11):55 -60.
[5] 蒯松岩,张旭隆,王其虎,等.开关磁阻电机神经网络无位置传感器控制[J].电机与控制学报,2011,15(8):18-22.
KUAI Songyan,ZHANG Xulong,WANG Qihu,et al.Position sensorless control of SRM using neural network[J].Electric Machines and Control,2011,15(8):18 -22.
[6] 朱志莹,孙玉坤,嵇小辅,等.磁悬浮开关磁阻电机转子位移/位置观测器设计[J].中国电机工程学报,2012,32(12):83-89.
ZHU Zhiying,SUN Yukun,JI Xiaofu,et al.Displacement and position observers designing for bearingless swtiched reluctance motor[J].Proceeding of the CSEE,2012,32(12):83 -89.
[7] 夏长亮,贺子鸣,周亚娜,等.基于支持向量机的开关磁阻电机转子位置估计[J].电工技术学报,2007,22(10):12-17.
XIA Changliang,HE Ziming,ZHOU Yana,et al.Rotor position estimation for switched reluctance motors based on support vector machine[J].Transactions of China Electrotechnical Society,2007,22(10):12-17.
[8] 蔡永红,齐瑞云,蔡骏,等.基于RBF神经网络的开关磁阻电机在线建模及其实验验证[J].航空学报,2012,33(4):705-714.
CAI Yonghong,QI Riyun,CAI Jun,et al.Online modeling for switched reluctance motor using radial basic function neural network and its experimental validation[J].Acta Aeronautica et Astronautica Sinica,2012,33(4):705 -714.
[9] 王定成,方廷健,高理富,等.支持向量回归机在线建模及应用[J].控制与决策,2003,18(1):89-95.
WANG Dingcheng,FANG Tingjian,GAO Lifu,et al.Support vector machines regression on-line modelling and its application[J].Control and Decision,2003,1 8(1):89 -95.
[10] 阎威武,常俊林,邵惠鹤.基于滚动时间窗的最小二乘支持向量机回归估计方法及仿真[J].上海交通大学学报,2004,38(4):524-532.
YAN Weiwu,CHANG Junlin,SHAO Huihe.Least square SVM regression method based on sliding time window and its simulation[J].Journal of Shanghai Jiaotong University,2004,38(4):524-532.
[11] MA J S,THEILER J,PERKINS S.Accurate on-line support vector regression[J].Neural Computation,2003(15):2683-2703.
[12] 汪辉,皮道映,孙优贤.支持向量机在线算法及其应用[J].浙江大学学报:工学版,2004,38(12):1642-1645.
WANG Hui,PI Daoying,SUN Youxian.On-line support vector machine training algorithm and its application[J].Journal of Zhejiang University:Engineering Science,2004,38(12):1642-1645.
[13] 郑小霞,钱锋.基于支持向量机的在线建模方法及应用[J].信息与控制,2005,34(5):636-670.
ZHENG Xiaoxia,QIAN Feng.An SVM-based on-line modeling method and its application[J].Information and Control,2005,34(5):636-670.
[14] YAAKOV E,SHIE M,RON M.Sparse online greedy support vector regression[C]//Proceeding of the 13th European Conference on Machine Learning,August 19 - 23,2002,London,UK.2002:84-96.
[15] VIJAYAKUMAR S,WU S.Sequential support vector classifiers and regression[C]//Proceedings of the International Conference on Soft Computing,June 1 -4,1999,Genoa,Italy.1999:610 -619.
[16] FUNG G,MANGASARIAN O L.Proximal support vector machine classifiers[C]//Proceedings of the Seventh ACM SIGKDD International Conference on Knowledge Discovery and Data Mining,August 26 - 29,2001,San Francisco,USA.2001:77-86.
[17] BI J,BENNETT K P.A geometric approach to support vector regression[J].Neurocomputing,2003,(55):79 -108.
[18] 刘思峰.灰色系统理论及其应用[M].北京:科学出版社,2010:49-58.
