负阻抗补偿法在机电作动器上的研究与应用
2014-07-04王娜周元钧
王娜, 周元钧
(北京航空航天大学自动化科学与电气工程学院,北京100191)
0 引言
在多电飞机的270V高压直流供电系统中,功率电子装置驱动的电动机负载和变换器类负载显著增加。航空机电作动器(electromechanical actuator,EMA)作为其中的典型负载之一,由于闭环控制而具有恒功率负载(constant power loads,CPLs)特性。恒功率负载具有负阻抗特性,该特性会给供电系统的稳定运行带来负面影响[1-10]。另一方面,连接在航空直流供电网络上的电力传动系统,当采用PWM控制时必须考虑电磁兼容问题,一般采取在直流母线输入端必须加LC滤波器的方法[1,8-13]。
目前对于稳定性的研究,主要分为大信号方法和小信号方法两大类。根据Brayton-Moser混合势函数理论[8],在选定滤波谐振频率的情况下选取较大的滤波电容值,可实现系统在大扰动下的稳定性。但电容过大会导致电源合闸时大电流浪涌,这是航空电源所不希望的。另一方面,对于大容量的电容要求,如果采用电解电容会降低系统的可靠性,这也是航空设备所不希望的,同时不满足国军标航空系统特性中对于可靠性及瞬态电流的要求[16]。针对以上弊端,有研究者[11-14]根据Middlebrook阻抗比定理,采用无源阻尼的方法,在LC滤波电路中加入阻尼电路来抑制系统的。然而当阻尼电阻与电感串联时,阻尼电阻中会流过几乎所有的直流电流而降低效率;当阻尼电阻与电容串联时,则会流过几乎所有交流电流而严重影响滤波器的衰减特性及效率。还有文献[16-18]针对CPL的特殊负载特性,提出设计具有高性能鲁棒性的控制器,通过Lyapunov稳定性判据来解决系统稳定性问题。但是这类大信号分析方法引用复杂的非线性方程,要么控制器参数与系统参数有关,要么实现复杂,或者不满足快速性和可靠性要求,不能形成通用的控制算法,因而在实际应用中存在一定的局限性。
文献[19]提出一种负阻抗补偿法,它在母线电压上引入高频滤波器后,在保持恒功率特性的同时,使系统具有正导纳值,提高系统的稳定性。此方法基于小信号理论推导补偿器参数设计,通过劳斯判据保证稳定性,但是对于具有高性能指标的航空机电作动器而言,单纯的稳定性并不能保证良好的系统性能。因此还应在保证稳定性的同时,兼顾系统性能,以实现最优设计。
针对上述问题,本文研究该方法在航空机电作动器中的应用,由于航空机电作动器是一种存在大扰动的伺服控制系统,因此在补偿器的设计中,除保证系统稳定性外,还研究了补偿器对系统动态性能的影响,要求最大限度提高系统抗干扰能力。
1 系统建模及补偿器的设计
以270 V航空高压直流电源带载的电力作动器为研究对象,其系统结构如图1所示。直流电源经EMI滤波,通过双极性逆变器对5 kW无刷直流电机(BLDCM)供电。转速环和电流环均为传统的带限幅的PI调节器,位置环为比例调节。反馈电流是对母线电流采样而得。参考电流由转速调节器ASR输出和改进型负阻抗补偿器(modified negative input-resistance compensator,MNIRC)输出两部分组成。MNIRC补偿器公式为

式中:Kfm为高频增益;ωcm为转折频率。而增大电容法改善系统稳定性是通过增大图1中Cs电容值来实现的。
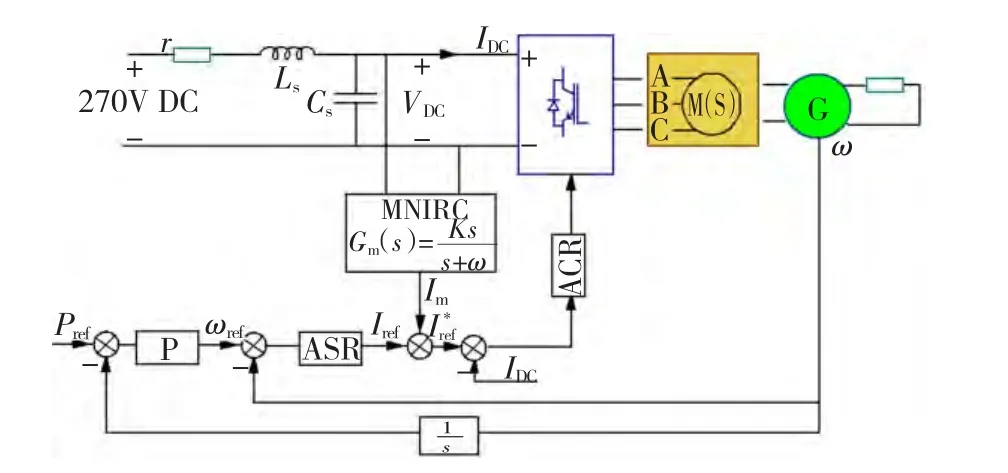
图1 带有补偿器的系统结构图Fig.1 Diagram of system with compensator
1.1 系统的输入导纳推导
定义系统输入导纳为由逆变器前直流端向逆变器侧看去的导纳值。保证这部分系统在动态模型时的导纳值为正,便能消除由闭环系统带来的负阻抗效应。
1.1.1 逆变器模型的建立
大功率逆变器具有非线性,建模时采用平均模型法,并将其进行小信号线性化处理。母线电压Vdc和PWM波信号决定电机输入电压Va。设电机电压平均值为Va,占空比为d,由于逆变器采用双极性PWM控制,存在Va=(2d-1)Vdc。因此为计算方便将2d-1记作D,则有

式中:前缀Δ为变量的小信号变量;下标0为变量的稳态值。
同理可得

1.1.2 系统传递函数
BLDCM电压方程和转矩方程可描述为

其中:Ra和La分别为电机绕组电阻和电感;Ke和Kt分别为电机反电势常数和转矩;n分别为转子转动的电角度;TL为负载转矩;J为转动惯量;RΩ为旋转阻尼系数。
将式(4)和式(5)进行Laplace变换,并消去n,可以得到电枢电流的平均值模型为

由此可见,电枢电流由电机电压和负载转矩共同决定的。
1.1.3 输入导纳的推导
在作动器控制系统中,为了很好地抑制负载干扰,要求电流环响应速度远高于负载转矩的变化速度。本补偿器设计是在电流环实现的,采用小信号分析时可认为负载转矩变化ΔTL为0。设电流环的传递函数为Gc(s)=Kc(s+zc)/s,根据系统电流环小信号模型可得

利用式(7)消去式(3)和式(8)中ΔD,再重新整理可得
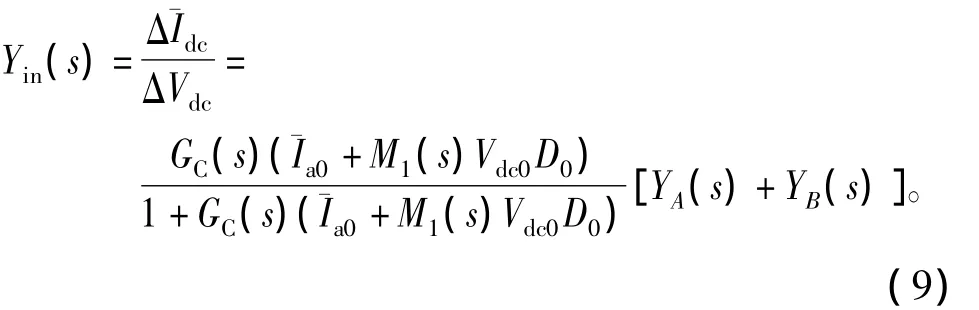
其中,

式(9)表明,系统输入导纳由两部分组成,YA(s)代表系统固有导纳,与补偿器无关。YB(s)表示补偿器修正下的导纳。在中频段,|GC(s)(+M1(s)Vdc0)|≥1,因此系统输入导纳第一项可近似为1。
1.2 改进型负阻抗补偿器的设计
补偿器应在保证系统稳定性的基础上,同时满足系统对快速性及航空直流电源畸变系数小于1%的要求。
将各参数及表达式代入可得

其中
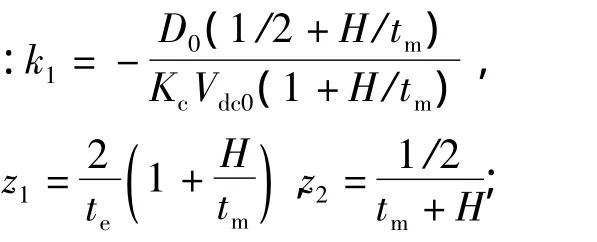
te=La/Ra和tm=JRa/KeKt分别为电机的电磁时间常数和机械时间常数。H=nJ/2TL为转动惯量常数。
式(12)表明固有导纳YA(s)有3个极点,其中z2接近于0,zc和z1间为中频段,且在中频段具有负的导纳。在中频段固有导纳YA(s)实部为

由式(11)可得,YB(s)在中频段实部为Kfm/2。为使系统具有正的阻抗值,必须满足YA(s)+YB(s)具有正实部,即

由此可见,高频增益Kfm越大,系统稳定性越好。同时,为了最大程度衰减输入滤波器极点震荡,输入滤波器固有频率应选在中频段,即

为考察系统抗干扰能力,分析加入补偿对转矩的影响,定义直流电压小扰动时变量变化为其灵敏度传递函数。假设负载转矩恒定,并忽略位置环和速度环,根据小信号模型可得电枢电流灵敏度传递函数为

与输入导纳表达式相似,式(16)由两部分组成,GA(s)代表系统固有灵敏度,GB(s)代表加入补偿后对其影响。整理GB(s)可得

为提高系统抗干扰能力,使GB(s)在中频段尽可能衰减,系统还应满足k2<1,即

即根据系统对干扰的要求,规定了高频增益Kfm的上限,因而要求Kfm不能取值太大,进一步限制了补偿器参数的范围,从而在保证系统稳定性的同时,兼顾系统动态性能,提高了系统的抗干扰能力。
1.3 系统稳定性分析
作动器系统滤波器输出阻抗为Zs,驱动系统输入阻抗为Zin,则系统总的输入阻抗值为ZsZin/(Zs+Zin)。根据系统结构图,可得出总输入阻抗表达式,其特征方程所有的根均为负,因此满足劳斯判据,故系统稳定。
2 双闭环调速系统仿真及性能分析
本文研究的机电作动器的主要参数如表1所示。分别采用增大电容和采用改进型补偿器的方法使系统稳定,仿真分析两种方法控制的系统的动态性能。

表1 闭环系统主要参数Table 1 Parameters of closed-loop system
将系统参数代入不等式(14),式(15)和式(18),可得到 MNIRC的参数应满足 0.015<Kfm<0.93,ωcm<ωs<29.4e3。Kfm的增大可减小纹波,但过度增大会加大系统超调,影响系统性能。随着ωcm的增大,电机转速超调量减小,调节时间缩短,但是直流侧电压震荡加剧,增大纹波系数,系统趋于不稳定。综合考虑,选定补偿器参数Kfm为0.3,ωcm为700。
2.1 系统的动态响应
分别对没有补偿器、采用大电容稳定、原负阻抗补偿器系统和采用改进型负阻抗补偿法的机电作动器系统进行仿真,其动态响应如图2所示,图中左侧为电网电压Vdc,右侧为电机转速。图2(a)是没有采用补偿器的系统响应,虽然快速性比较好,但是由于恒功率的附阻抗特性引起电网电压的振荡,调节时间长。由图2(b)可看出,因增大了滤波电容而增加了电网的稳定性,但是电网合闸时会出现很大的浪涌电流,使电流调节器出现负饱和状态,进而使电机转速产生很大的超调。同时太大的容性负载会加重电源负担,也是航空系统所不允许的。图2(c)为原负阻抗补偿器系统响应,为保证电网电压的稳定性,需要较大的补偿器系数,然而此时电机转速出现较大超调,因此不能兼顾电网稳定性和系统动态性能。图2(d)为带有改进型补偿器的系统响应,不仅使电网电压稳定,电机转速的快速性和超调都被控制到比较好的程度。

图2 电机启动至额定转速时电网响应比较Fig.2 Performance comparison for starting motor to rated speed
2.2 系统抗干扰性能
图3给出补偿器参数Kfm不同时在0.3 s电机由满载负载转矩突卸至空载时的波形。左侧为母线电流,右侧为电机转速。可以看出,当选定Kfm为0.3时,对于转矩大扰动,补偿器仍能很好的改进电能质量,减小纹波。但是当高频增益Kfm增大至超出由抗干扰因素限制的上限时,电机及电网电流均出现不期望的震荡,从而验证了对Kfm取值上限进行电机平稳运行。

图3 负载转矩大扰动时电机响应Fig.3 Response for large disturbance of load
仿真结果表明,改进型负阻抗补偿器可以在不影响电机快速性的情况下,改善电能品质,减小纹波系数。当电网电压发生扰动,以及对于转速及负载转矩大扰动问题,仍然适用。
3 带补偿器的航空作动器系统仿真及实验
电力作动器是驱动飞机舵面的位置伺服控制系统,运行中转速、负载变化范围很大。电力作动器的运行中尽管功率是大幅度变化的,但每个小区间可看作闭环调速系统,即对于电网而言是恒功率负载。事实上电力作动器的大扰动状态下运行,保证系统的稳定性更为重要,它不仅会影响对飞机舵面的操纵性能,而且更容易导致飞机电网的不稳定。改进型负阻抗补偿器在航空电力作动器中的应用,不仅能够保证作动器的动态性能,更为重要的是保证了电网的稳定性。
图4给出了带有改进型负阻抗补偿器的航空作动器系统仿真及实验曲线,系统参数如表1所示,伺服电机由启动到平稳运行,0.25 s后到达给定偏角。图4(a)左侧为直流侧电网电流,右侧为电机转速。控制电机在额定转速下运行,在电机停车后仍需要一定的转矩来维持偏角位置。实验采用补偿器设计方法,实验曲线如图4(b)所示。由于此时电源系统为开环理想电源和等效内阻结构组成,因此可通过电网电流波形来体现电网电压响应。实验数据表明该方法可大大改善电网电流波形,减小纹波大小,提高了系统稳定性,与理论推导结果一致。图4可以看出,加补偿后在电机启动、运行及制动过程中,系统稳定,直流电网受影响程度较小,纹波系数小,可满足航空供电要求,验证了补偿器对原系统稳定性及电能品质的改善。
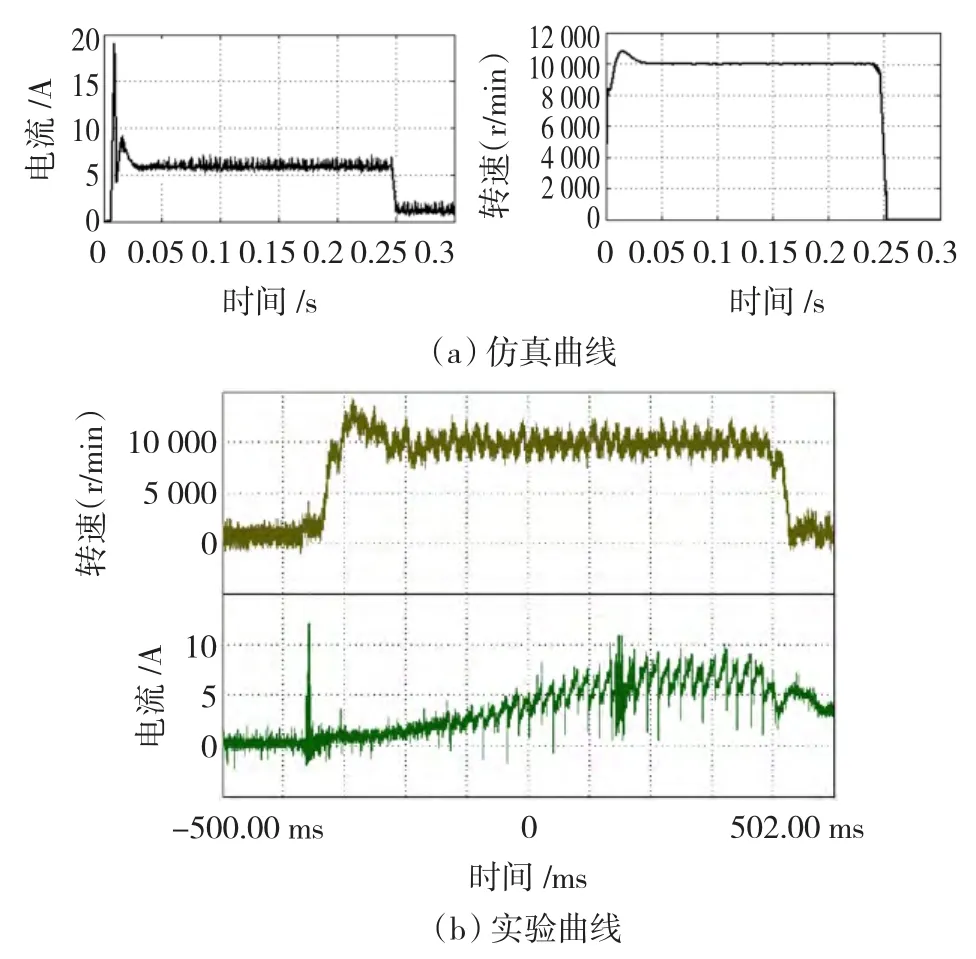
图4 带有补偿的航空作动器系统仿真及实验曲线Fig.4 Simulations and experiments curves of the actuator system with compensator
4 结论
改进型负阻抗补偿法从稳定性及系统性能两方面考虑。其参数由不等式范围决定,通过仿真分析可得,当高频增益增大时,电网纹波减小,但过度增大会加大超调,且对电网扰动的抗干扰能力降低;当转折频率增大时,电机转速超调量减小,调节时间缩短,但是电网电压震荡加剧,系统趋于不稳定。虽然公式推导自小信号法,但对于大扰动问题仍然适用。
通过仿真和实验验证,在同样的纹波系数要求下,相对于大电容法,能更好的保障伺服电机平稳运行,从而实现使用较小电容满足系统稳定性要求,同时满足电机快速性及鲁棒性。因此,带有改进型负阻抗补偿器的航空作动器系统以其简单易行,线性等优势具有较强的应用前景。
[1] 刘欣博,周元钧.具有双级LC滤波器的恒功率负载系统在大扰动下的稳定性[J].中国电机工程学报,2011,31(27):29-35.
LIU Xinbo,ZHOU Yuanjun.Large signal stability criteria for constant power loads with double-stage LC filters[J].Proceedings of the CSEE,2011,31(27):29-35.
[2] 朱成花,严仰光.Boost变换器恒功率负载时动态性能分析[J].南京航空航天大学学报,2005,37(1):20-24.
ZHU Chenghua, YAN Yangguang. Stablity and dynamics of BOOST converter with constant power load[J].Journal of Nanjing University of Aeronautics& Astronautics,2005,37(1):20-24.
[3] JUSOH A B.The instability effect of constant power loads[C]//National Power and Energy Conference,Malaysia,2004.
[4] 高朝晖,林辉,张晓斌.Boost变换器带恒功率负载状态反馈精确线性化与最优跟踪控制技术研究[J].中国电机工程学报,2007,27(13):70-75.
GAO Zhaohui,LIN Hui,ZHANG Xiaobin.Exact linearization and optimal tracking control of boost converter with constant power loads[J].Proceedings of the CSEE,2007,27(13):70-75.
[5] EMADI A,FAHIMI B,EHSANI M.On the concept of negative impedance instability in the more electric aircraft power systems with constant power loads[C]//34thIntersociety Energy Conversion Engineering Conference.Savannah,USA:ASME,1999:689-699.
[6] EMADI A,KHALIGH A,RIVETTA C H,et al.Constant power loads and negative impedance instability in automotive systems:definition,modeling,stability,and control of power electronic converters and motor drives[J].IEEE Transactions on Vehicular Technology,2006,55(4):1112-1125.
[7] 钱浩,郭宏,吕振华.同步发电机整流系统带恒功率负载的稳定性分析[J].航空学报,2010,31(12):2379-2384.
QIAN Hao,GUO Hong,LV Zhenhua.Stability analysis of synchronous generator-rectifier systems with constant power loads[J].Acta Aeronautica Et Astronautica Sinica,2010,31(12):2379-2384.
[8] JELTSEMA D,SCHERPEN J M A.On Brayton and Moser’s missing stability theorem[J].Circuits and Systems,2005,52(9):550-552.
[9] Roux Nand Richardeau F.Stability of DC link with reduced energy storage for regenerative synchronous drive-Analytical approach[C]//European Conference on Power Electronics and Applications,2-5 Sept.2007,Aalborg,Denmark.2007:1-10.
[10] MOSSKULL H,WAHLBERG B,GALIC J.Validation of stability for an induction machine drive using power iterations[C]//16th IFAC World Congress,Czech republic,2005.
[11] ERICH S Y,POLIVKA W M.Input filter design criteria for current programmed regulators[J].IEEE Transactions on Power E-lectronics,1992,7(1):143-151.
[12] GIRINON S,PIQUET H,ROUX N,et al.Analytical input filter design in DC distributed power systems approach taking stability and quality criteria into account[C]//13th European Conference on Power Electronics and Applications,8-10 Sept.2009,Barcelona,Spain.2009:1-10.
[13] MARX D,PIERFEDERICI S,DAVAT B.Nonlinear control of an inverter motor drive system with input filter-Large signal analysis of the DC-link voltage stability[C]//39thIEEE Annual Power Electronics Specialists,15-19 June,2008,Rhodes,Greece.2008:498-503.
[14] 空军 GJB181A-2003飞机供电特性[S].2003.
[15] CIEZKI J G,ASHTON R W.Application of feedback linearization techniques to the stabilization of DC-to-DC converters with constant power loads[C]//ISCAS,31 May-3 June 1998,Monterey,CA.1998:526-529.
[16] LOOP B P,SUDHOFF S D,ZAK S H,et al.Estimating regions of asymptotic stability of power electronics systems using genetic algorithms[J].IEEE Transactions on Control System and Technology,2010,18(5):1011-1022.
[17] MOHEIMANI S O R.Perspectives in Robust Control(Lecture Notes in Control and Information Sciences)[M].Berlin:Springer,2001.
[18] HARNEFORS L,Pietläinenardier K.Inverter DC-link stabilizing control with improved voltage sag ride-through capability[C]//European Conference on Power Electronics and Applications,2005,Dresden,Germany.2005:10 pp.-P.10.
[19] LIU Xinyun,Andrew J,Andrew M.Negative input-resistance compensator for a constant power load[J].IEEE Transactions on Industrial Electronics,2007,54(6).