PSWST-PLC型调速器在水电站的应用
2014-07-04吴名钢
吴名钢
(大源渡航电枢纽管理处, 湖南 衡阳 421412)
某水电站4 台灯泡贯流式发电机组全部从奥地利ELIN 公司引进; 水轮机为转桨式,分别从德国SULZE 公司和MCE 公司引进。4 台机组于1999-10-28 全部并网发电。2012年,水电站采用武汉国测三联水电设备有限公司生产的PSWST-PLC型调速器,对4 号机组进行了改造。
1 PSWST-PLC 型调速器的总体构成
PSWST-PLC 型调速器由微机调节器和机械液压系统两大部分组成。微机调节器部分采用双机(A、B 机)冗余容错系统,2 套微机控制器均能独立完成水轮发电机组的开机、停机、增减负荷、紧急停机等自动调节任务,微机控制器选用德国西门子公司生产的S7-300 系列PLC;机械液压系统由电液转换器(采用比例伺服阀+高速数字球阀冗余结构)、紧急停机、主配压阀、纯机械手动机构等组成,采用先进的机械液压集成技术,无明管、无泄漏、无杠杆。
2 PSWST-PLC 型调速器的工作方式
2.1 自动调节
自动通道由微机控制器组成,微机控制器A或B 均能控制机械液压系统自动通道的比例伺服阀或高速数字球阀。微机控制器采用适应式变参数的机组转速(频率)PID 调节规律和机组功率适应式变参数PI 控制规律。微机控制器接收机组LCU的“事故停机信号”,并且控制接力器以允许的最快速率关闭到全关。
2.2 电手动调节
在电手动调节模式工作时,微机控制器A 或B 控制机械液压系统的比例伺服阀或高速数字球阀,跟踪与调速系统有关的状态及参数,以实现由“电手动控制”到“自动调节”之间的无扰动切换。电手动调节也可通过现地控制柜面板实现“电手动控制”到“纯机械手动”之间的无扰动切换。
2.3 纯机械手动
失电时,自复中装置在压力油的作用下可带动主配压阀回到复中位置,由手动操作阀与其一起执行纯机械手动功能。
2.4 控制方式的切换
PSWST-PLC 型调速器在各种控制方式间可实现无扰动切换。
(1)自动通道、电手动之间的切换:通过调速器控制柜操作开关切换。
(2)电手动切换至纯机械液压手动:电手动通道故障切换至纯机械液压手动。
(3)自动通道、纯机械液压手动之间切换:通过调速器控制柜操作开关切换,或自动通道故障切换至纯机械液压手动。
3 PSWST-PLC 型调速器的特点
3.1 全时PID 控制技术
图1 为全时PID 控制逻辑示意。由图1 可知,全时PID 算法的精髓主要是在PID 上增加了连续调节的PD 环节。即将连续10 个周期采样的被调节偏差放入1 个数组,得到10 个ΔF(被控制偏差值):ΔF(k),ΔF(k-1),ΔF(k-2)…ΔF(k-9),并在数组中记录好偏差的正负标志和偏差的周期数;当检测到当前偏差值与上周期偏差值相等时,选择数组中与当前偏差符号相同的最大偏差值,并根据最大偏差的周期数,相应地改变微分时间常数T1v和偏差的测量周期τ来进行PD 调节;调节完成后,在数组中剔除此偏差值。这样就避免了在被调节量偏离目标值、但偏差变化缓慢时,出现比例和微分通道几乎不起作用的现象。
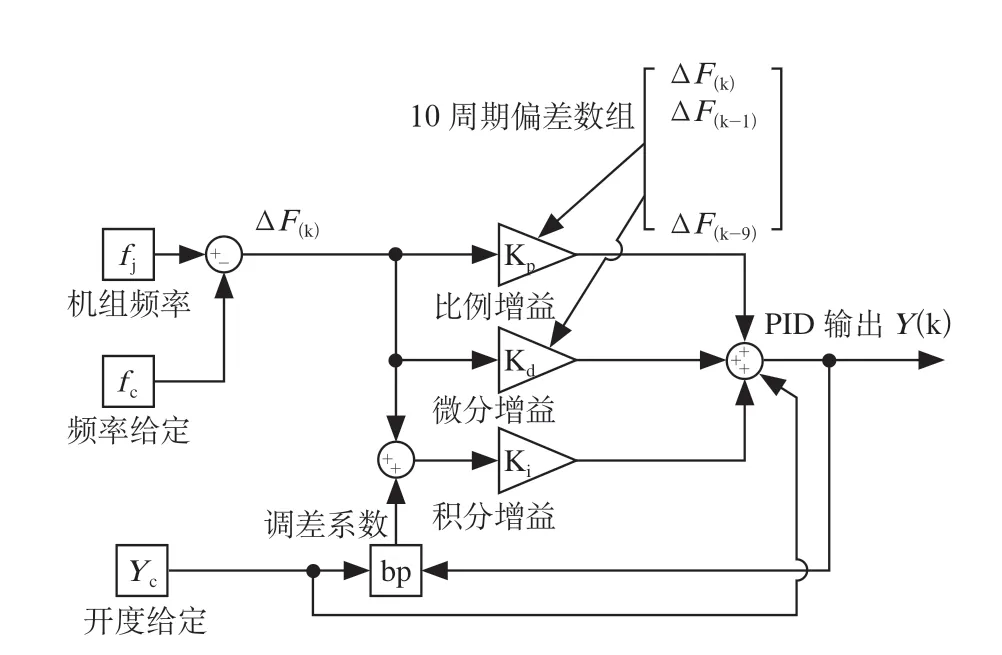
图1 全时PID 控制逻辑
PID 控制器算式如下:

相应的离散算式为:

其中:KP、Ki、Kd分别为比例、积分、微分系数;
e(k)为第k 次采样值;
u(k)为第k 次采样时刻的输出值。
根据式(2),用一个单神经元构造PID 控制器,如图2 所示。
图2 中控制器偏差X1(k)=e(k);控制器输入X2(k)=e(k)-e(k-1),X3(k)=e(k)-2e(k-1)+e(k-2);控制器输出u(k)=W1X1(k)+W2X2(k)+W3X3(k)。其中,Wi为控制器的加权系数,相当于PID 控制器中的KP,Ki,Kd,但参数Wi可以进行在线修正,可根据被调节量的偏差不断地调节PID 系数,以达到调整Wi的目的,从而找到最优值W*。
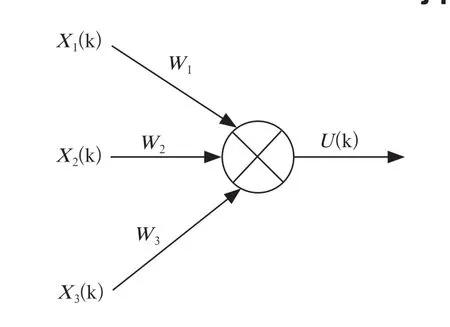
图2 单神经元构造的PID 控制器逻辑
为提高调速器的静动态品质,在控制电液随动系统中,可采用PI 型综合放大器减小调速器的转速死区ix和桨叶随动系统的不准确度ia;采用PD型综合放大器减小接力器不动时间Tq。
微分控制是指当输入偏差值突然变化时,微分作用可有效地阻止或刺激控制器输出相应变化。这时,控制器的动作仅受微分作用决定,而不受比例或者积分控制的计算结果影响。
输出控制PD+PI 的基本设计思想是,当偏差较大时,投入微分控制,取消积分作用;当偏差较小时,引入积分控制,取消微分作用。
3.2 防机组飞逸
3.2.1 闭环开机及同期控制
根据机组转速变化的速率自动改变开机曲线的斜率和顶点,自动适应任何水头的变化,从而达到平稳、快速、无超调自适应闭环开机的目的。全范围开放式的测频方法,能保证在0.5~99 Hz 范围内可靠的频率测量结果,在低频段采用以导叶开度为依据的转速逐次逼近,在高频段则采用趋势辨别转速的方式。这种开机规律是以最佳过程启动水轮发电机机组,尽量减少开机时间,能够保证在任何异常情况(如机组导叶漏水,机组未停稳,机、网频率断线,导叶反馈断线等)下不过速、不停机。
3.2.2 空载自动调节
调速器的参数中设置了最大及最小空载开度值。因此,调速器在空载运行时,应始终将导叶开度控制在该范围内。
3.2.3 关键信号容错能力
频率容错,即实时自动诊断机组频率及系统频率,提示故障类别。在空载时,当检测到机组频率故障,则自动将当前导叶开度调至最小空载开度(最高水头下的空载开度);当系统频率故障,则自动跟踪频率给定。在负载时,机、网频互为容错;当机频发生故障时,自动取网频,否则取机频作为被调节量;当机、网频均发生故障时,可现地或远方手动控制机组的转速或有功功率(导叶开度)。
3.3 防假甩负荷
为防止断路器误故障,使得机组甩负荷,系统在判断甩负荷的条件中增加了机组频率和有功功率判据。当断路器信号断开时,先给导叶1 个快关信号,若机组频率并未上升,且功率未下降,则认为机组仍并网运行;若断路器信号断开,且机组频率上升、功率下降,则确认机组甩负荷,调速器进入甩负荷状态。
3.4 防机组慢转
根据机组转速变化的速率自动改变开机曲线的斜率和顶点,自动适应任何水头的变化,达到平稳、快速、无超调自适应闭环开机的目的。同时,具有空载频率跟踪及相位调节功能,以保证同频同相,具有快速并网能力。
3.5 防空载泄水
3.5.1 缩短空载运行时间
采用闭环开机及补偿PID 空载算法,并且具有空载频率跟踪及相位调节能力,减少了从发出开机令至机组到空载的时间,缩短了机组空载到并网的时间。
3.5.2 压紧行程
机组备用工况调速器具有1 %~3 %的“压紧行程”,在停机连锁工况下可使主配压阀保持在相对偏关的位置,确保机组的关闭,有效地防止导叶漏水。
3.6 控制机组转速下降
机组甩大开度负荷时,根据转速决定导叶开启的速度和大小,可有效地控制机组的转速下降。当机组甩负荷50 %以上时,机组的转速上升,导叶快速关闭,电气开限设定为2 倍的空载电气开限;当机组转速上升到最高点后开始下降时,导叶关闭速度减慢,如果此时机组已全关,则将导叶开启到5 %~10 %的开度,以减小下游涌浪;当机组转速下降的变化率大于某一个值时,控制导叶快速开启到空载,然后减慢开启速度。该方式可控制甩负荷大于50 %时机组转速下降至最低值,并且可缩短甩负荷过程中调速器调节的过渡过程。
3.7 控制涌浪
为了避免甩大负荷时上下游水位发生较大的涌浪,调速系统还设有涌浪控制软件程序。调速器甩负荷时上下游水位发生较大的涌浪,会造成水锤压力过大。因此,采用甩负荷导叶不全关、转速由上升至下降过程中导叶打开和甩负荷后使空载电气开度限制值大于开机过程的空载电气开度限制值等智能化控制方式,可保证甩负荷后空载调节范围更宽,抑制机组转速下降至过低,大大缩短甩负荷的过渡过程,同时减小下游产生的涌浪。
单机甩较大负荷时,机组转速上升过高,应快速关闭导叶。当机组转速下降时,打开导叶开度到某一预置开度,以减少水锤压力的上升;当机组转速下降到额定转速附近时,投入PID 控制,使机组转速稳定在额定转速。多机甩较大负荷时,关闭导叶并自动脱协联,由桨叶的角度控制机组转速下降和减弱流域的涌浪强度。
3.8 增强桨叶的协联功能
调速器通过电气协联方式实现水轮机导叶与桨叶的协联。根据水轮机协联曲线整定的协联函数发生器,按实际水头自动选择相应协联曲线,停机后自动将轮叶开到启动角度,并在启动过程中根据导叶开度的开启自动切换到正常协联。
3.8.1 正常协联
常规数字协联方式是接受水头信号,并按实际水头自动选择相应的协联曲线,预设10 条水头下的协联曲线,每条协联曲线上设置10 个点,线与线之间以及点与点之间采用线性插值,最后采用逐次逼近方式输出,可保证与理论协联曲线一致。
3.8.2 增强协联
(1)开度与协联的关系修正。当导叶开度不变时,桨叶的协联点在一个小范围内自动修正,以弥补协联曲线理论与实际的误差。
(2)振动、摆动与协联的关系修正。当导叶开度一定时,桨叶的协联点在一个小范围内自动修正,以抑制机组的振动、摆动情况(在引入机组振动、摆动模拟量的前提下)。
(3)负荷与协联的关系修正。当导叶开度一定时,自动修正桨叶的协联点,以控制机组的效率最高及负荷的摆动最小,保证机组高效、稳定运行。
3.8.3 非正常协联
(1)流量与协联角度的控制。在引入通过机组流量信号的前提下,用桨叶角度来控制机组负荷与流量。
(2)涌浪与协联角度控制。当线路开关或者多台机组甩大开度负荷时,自动脱协联,有效地控制下游涌浪。
3.9 大、小网及孤网判定
以转速的变化和变化率为依据准确地判断机组在大、小电网中的运行情况,并且自动切换运行工况和调节参数,可以人为选择一次调频是否投切。当一次调频投入,电网频率的波动大于一次调频死区而小于小电网的死区时,调速器按照调差率bp 控制机组的出力,以保证电网的稳定运行;当线路发生故障或线路开关跳闸时,调速器能够自动、平稳地运行在大、小电网,孤网,厂用电及空载工况下。
负载运行时,可根据频率的变化以及负荷或开度的调整对频率引起的变化作为判断大小电网的依据,自动改变运行模式。在开度调节或功率调节模式下,当判断为小电网或电网故障时,机组将自动切换到频率调节模式运行。
当转速变化率超过频率失灵区N 个周期后,机组自动切入频率调节模式,并转至小网运行;当频率变化率在频率失灵区范围内,一段时间后,机组自动切入开度调节或者功率调节模式,并转至大电网运行。
4 结束语
水电站4 号机组调速器经改造后,总体运行情况良好,故障少、维护量小,大大提高了水电站的安全性指标和经济性指标,对其他电站有很好的借鉴和推广作用。
