船基靠泊辅助系统的可靠性分析
2014-07-02周杏利张寿桂彭国均
周杏利,张寿桂,彭国均
(集美大学航海学院,福建 厦门 361021)
0 引言
现代船舶越来越大型化、高速化,大型船舶靠泊的安全系数日益降低[1],为了增加大型船舶靠泊的安全性和有效性,人们投入了大量精力进行大型船舶靠泊辅助系统的研发.以前的靠泊辅助系统大都是岸基产品,但是岸基靠泊辅助系统存在一定的局限性,如声波靠泊系统易受到水面波和底部反射波的影响;雷达靠泊系统易受障碍物的影响;激光靠泊系统易受光线的散射、杂散光线的干扰等[2].目前的船基靠泊辅助系统有较大发展[3],如挪威的AD NAVIGATION公司推出的ADX XR[4],丹麦的MARIMATECH公司研发的E-Sea Fix PILOT[5],以及新西兰 Navicom Dynamics公司研发的HarbourPilot Lightweight[6]等,目前国内的靠泊辅助设备主要包括:大连贝斯特电子有限公司研发的“贝斯特领航”系统;集美大学船舶助航技术研究所研发的大型船舶靠泊系统;以及北京亿海蓝科技研发的AIS引航助手软件等[7].
本文根据船基靠泊辅助系统的共同特点,主要考察国内研发的大型船舶船基靠泊辅助系统,分析影响其可靠性的因素,为以后系统的改善提供参考.
1 船基靠泊辅助系统简介
根据测量与显示的需要,船基靠泊辅助系统由硬件和软件两部分组成,即靠泊辅助定位终端与靠泊辅助显示系统.靠泊辅助定位终端由主机和从机两部分组成,实现数据的采集与传输;靠泊辅助显示系统可以在IOS系统环境下开发,实现将所采集数据与船舶靠泊动态过程在IPAD/IPHONE上实时显示的功能.
1.1 靠泊辅助定位终端
靠泊辅助定位终端由主机和从机两个部分组成,放置时一般将主机放在靠近岸边的一侧,从机放在远离岸边的一侧.
主机结构如图1所示.主机一般由定位模块、AIS模块、WIFI模块、电源模块以及中央处理器组成.定位模块接收GPS/北斗定位信息,然后送到中央处理器进行处理,AIS模块通过串口将AIS信息传递给中央处理器,电源模块为整个系统供电,也受中央处理器控制,这些信息经处理之后通过串口与WIFI模块相连,再经WIFI将信息发送给软件显示系统[8].
从机结构如图2所示.与主机相比,其缺少了AIS模块,系统仅需要一次AIS信息就足够,但是从机也要获取一个位置信息来计算距离、速度、方向等,因此其内部也具有一个定位模块,从机获取的定位信息通过WIFI传送给主机,主机利用WIFI将主机自身的定位信息、AIS信息以及从机的定位信息发送给软件显示系统[8].
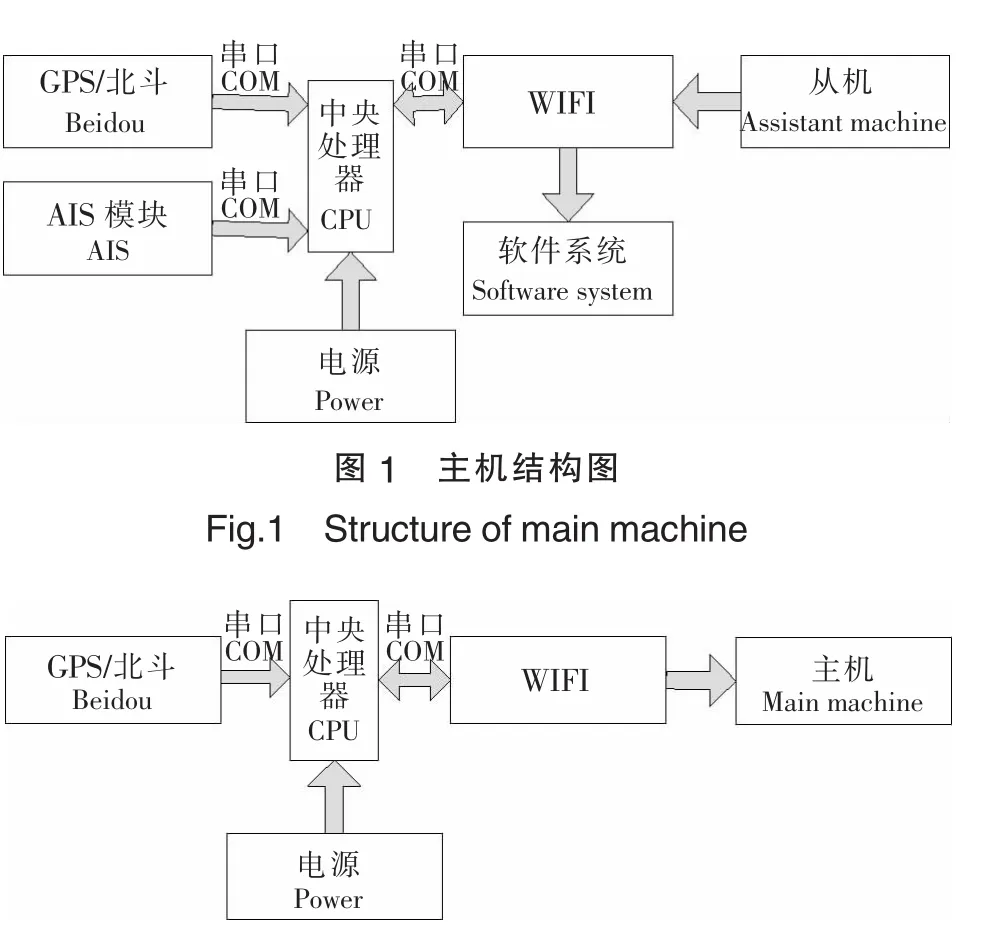
图2 从机结构图Fig.2 Structure of assistant machine
1.2 靠泊辅助显示系统
靠泊辅助显示系统采用模块化设计,将整个系统进行分块,每一个模块独立地承担相应的功能,分层结构使得软件系统的设计具有无关于硬件的特性.这样的设计使得该系统软件的开发十分灵活,不需考虑硬件的特性,软件和硬件的设计可以分开同时进行,不仅进展速度快,还减少对研发者思路的禁锢.软件最终实现的是能够在显示平台 (主要是IPAD,IOS系统的IPHONE手机)上实现数据的动态更新、及时显示、历史回放等功能.
2 系统可靠性因素分析
2.1 设备因素
2.1.1 定位精度
经向有关专家咨询,一般靠泊的定位精度应控制在1 m以内.如果误差过大,可靠性就不高[9].设备本身定位单元存在的误差是无法避免的,只能尽可能减小.设备内部的定位单元搜索并捕获到的卫星信号,经过卫星接收机的机内软件的处理,如滤波、放大、混频等,实现对定位信号的跟踪与提取.在该过程中,由于天气等原因可能影响到接收卫星的效果,从而影响设备本身定位的精度,这仅是单点定位的精度.如果单点的精度不高,在利用两个单点来计算距离等信息时,会造成很大误差.例如,当两个单点定位数据造成的误差使得真实船体与测得数据对应船体之间的夹角为0.1°,扩散到船长为300 m的大型船舶上时,其定位精度将达到0.5 m的误差.该误差的计算依据如图3所示.
假定船长为300 m,靠泊辅助系统两个定位终端 (主机和从机)分别放置在距离船艏250 m的船桥两侧.主机与从机各有一个定位数据,这两个定位数据与实际必定有一个偏差,假如该偏差使得船舶的实际位置 (右侧)与测得位置 (左侧)有一个夹角为α的误差.则计算出的船头与码头的距离误差为:L误差≈ 船长 *sinα.假设该夹角为0.1°,船长为300 m,则计算出的船头与码头的距离误差可以达到0.5 m.
2.1.2 计算误差
靠泊辅助系统定位终端需要为相关人员提供的数据,包括船艏向、船艏与船尾的横移速度、船艏距离岸边的距离、船尾距离岸边的距离等,其中涉及角度的计算、数值的换算等,一个数据经过几次换算 (例如换算角度)之后,其误差会被放大.

图3 定位精度误差计算图Fig.3 Caculation chart of positioning accuracy error
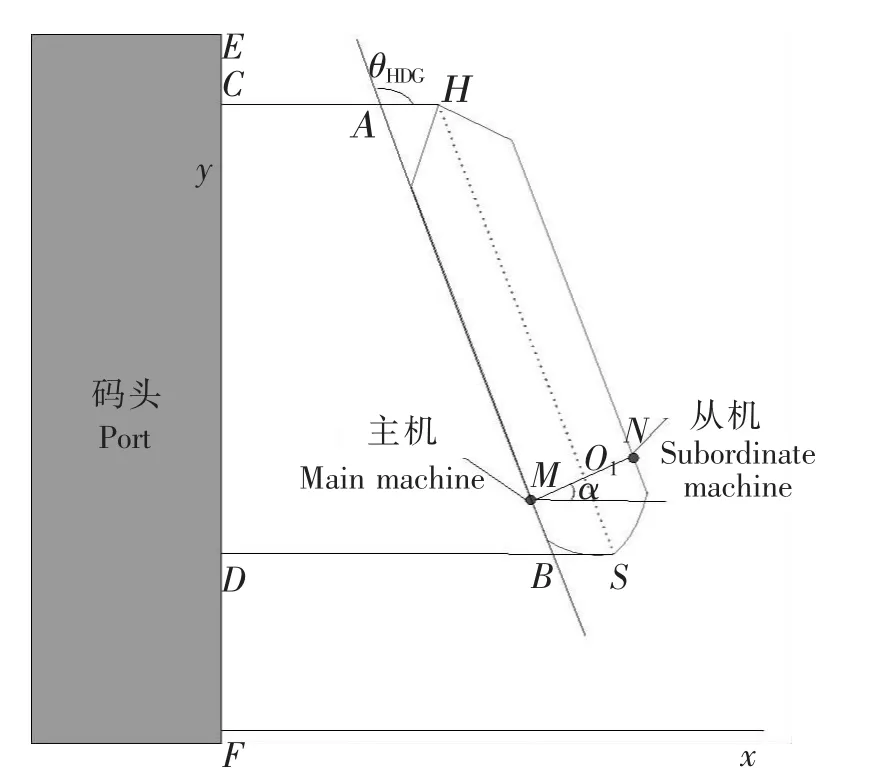
图4 算法误差计算图Fig.4 Caculation chart of arithmetic error
如图4所示,以岸边某一点F为原点,FE为Y轴,垂直于FE、船舶所在侧为X轴的正方向建立坐标系,已知数据为船长L(暂时不用)、船宽W,靠泊辅助定位终端放置点M和N与船艏的距离(放置时注意直线MN的方向垂直于船舷),即M和N中点O1距离船艏点H的长度L1.另外,可以通过定位单元测得的数据有靠泊辅助系统定位终端放置点坐标M(Mx,My)和 N(Nx,Ny).
2014年起,我国经济发展逐渐进入新常态,呈现速度变化、结构优化、动力转化三大特点。如何在连年丰产增收后不断巩固农业农村持续向好的局面,主动应对、着力破解新老问题交织的困境,培育出新的发展动能?唯有依靠深化改革。2015年中央“一号文件”要求加大改革创新力度,加快农业现代化建设。2016年中央“一号文件”明确要用发展新理念破解“三农”难题,助力实现小康社会,并提出推进农业供给侧结构性改革。2017年中央“一号文件”进一步强调要以农业供给侧结构性改革培育“三农”发展新动能。
首先船艏向θHDG的计算方法是:根据M、N点坐标,计算出直线MN与X轴的夹角α,即α=arctan((Ny-My)/(Nx-Mx)),再向左旋转90°,可得到船艏向θHDG(即MA的方向),即θHDG=α+90°.
在此计算的船艏距离岸边的距离为图4中所示的HC,船尾距离岸边的距离为图4中所示的SD,首先计算A点位置:由M点坐标(Mx,My)和N点坐标(Nx,Ny),可以得知M、N的中点O1的坐标(O1x,O1y),即O1x=(Nx-Mx)/2,O1y=(Ny-My)/2.
已知L1的长度和O1点坐标,加上计算出来的船艏向θHDG,即可计算船艏点H坐标,计算方法为:

进而可得A点坐标:
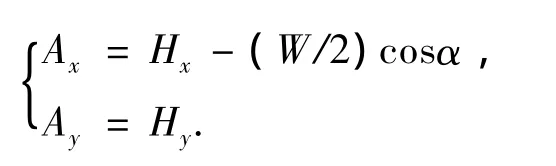
由图4可知:AC距离即为A点的横坐标Ax,HC的距离即为H点横坐标Hx.
同理,可计算出SD的距离.为计算横移速度,需经过一段时间间隔,在两个时刻T1和T2下,计算出HC和SD的距离,分别为HCT1、SDT1和HCT2、SDT2,进而可以计算出船首的横移速度为V首=(HCT1-HCT2)/(T1-T2).船尾的横移速度为V尾=(SDT1-SDT2)/(T1-T2).
以上为辅助靠泊过程所需要各种数据的算法,但该算法并不是最准确,如计算夹角α时,利用公式α=arctan((Ny-My)/(Nx-Mx))来计算,会存在估算成分,从而导致船艏向出现误差,由此而计算出的船艏距岸边的距离HC、船尾距岸边的距离SD,船艏和船尾的横移速度也存在误差.
2.1.3 内部干扰
所有的电子线路内部都会产生电磁干扰,该设备也不例外.设备内部的电磁干扰现象也是影响设备可靠性的重要因素.设备内部的电磁干扰源,主要是靠泊辅助系统定位终端主机和从机两个设备之间通信所用的WIFI模块,对定位模块 (在此主要是北斗/GPS接收机)接收定位信号的过程以及AIS接收机接收AIS信号的过程进行干扰.为了减弱电磁干扰的影响,研发人员采用了各种方法,如,将设备的电子线路进行屏蔽,将电子线路用盒状或壳状屏蔽体包围起来,从而割断或削弱空间耦合通道,阻止其电磁能量的传输,进而消除或抑制设备间的电磁干扰.
2.1.4 显示误差
设备的显示误差主要来自于软件系统电子海图的误差,另外还涉及承载系统软件的硬件设备的性能.电子海图的准确性依赖于电子海图上数据的及时更新率、显示界面的清晰度等,系统的软件部分要能够及时显示出船舶的动态信息,而且还要随时刷新数据.因为在靠泊期间,每一时刻船舶的位置都在改变,必须连续不断地更新动态数据,这些依赖于系统软件承载体的计算能力,只有保证数据的计算与显示能及时顺利,才能为引航员以及船长提供可靠的数据,保障船舶安全靠泊.目前集美大学船舶助航技术研究所研发的靠泊辅助软件系统刷新速率达到1次/s,一般硬件设备都能够满足其要求.
2.2 环境因素
1)自然环境 自然环境主要是指恶劣的天气,大风大浪天气会导致船舶摇摆严重,系统采集到的数据存在较大误差,从而导致设备的稳定性能不好;阴雨天气会导致设备的搜星能力降低,卫星信号本身是广播式的,且呈直线传播,信号的强度并不高,所以穿透力比较弱且易受到物体阻碍,如果在阴雨天气,空中散布着水滴,这会影响卫星信号的穿透性能,减弱信号的强度,从而导致搜星能力降低,定位能力差.
2)地理环境 指的是靠泊地点的地理条件,如果泊位附近有高地,或者泊位处于一个港湾,四周有障碍物,会严重影响通讯信号的传输,导致靠泊辅助系统定位终端主机与从机之间、主机与辅助靠泊显示系统之间通信受阻.
3)电磁干扰 此处指的是环境中的外部电子设备、外部电磁信号对设备的干扰.在靠泊过程中,引航员和船长为了实现安全靠泊,随身携带对讲机以实现与船上其他工作人员、岸上监管部门及时通话.此时,由于各通信模块工作频段不同,对讲机对靠泊辅助设备的干扰会十分厉害,从而影响信号的接收.
2.3 人为因素
人为因素也会影响船基靠泊辅助设备的可靠性.人为因素主要是指人员放置靠泊定位终端的位置是否准确.要求在放置时,两个靠泊定位终端一定要垂直于船艏线,如果放置不垂直,计算出的结果会出现较大偏差,该设备就起不到任何辅助作用,甚至会干扰引航员或船长的判断,对船舶的安全靠泊反而起误导作用.
3 可靠性评价指标体系的建立
通过以上对影响船基靠泊辅助系统可靠性因素的分析,并咨询相关领域的专家及研发人员,建立了船基靠泊辅助系统可靠性评价指标体系,如图5所示.此体系包括三个一级指标,八个二级指标.这些指标可以作为评价船基靠泊辅助系统可靠性的依据,为船基靠泊辅助系统的进一步改良提供理论支持.
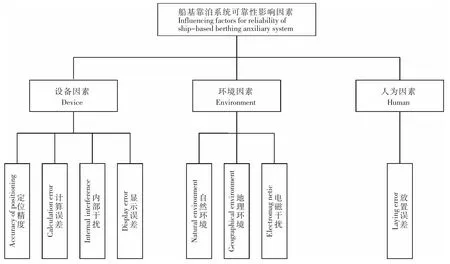
图5 船基靠泊辅助系统可靠性评价指标体系图Fig.5 Reliability evaluation index chart of ship-based berthing auxiliary system
4 结语
影响船基靠泊辅助系统可靠性的因素很多,不仅仅包含以上所述的内容,还有很多没有注意到的其他因素,比如船舶本身,后续还会做进一步分析,并且了解这些因素影响靠泊系统可靠性的权重,以期为系统改进过程中尽量削弱甚至消除不利因素的影响提供帮助,进而提升系统的可靠性.
[1]杨定照.集装箱船大型化对船舶靠泊安全的影响 [J].航海技术,2011(2):8-10.
[2]陈航.激光靠泊技术研究与工程实现[D].大连:大连理工大学,2005:3-5.
[3]HIROYUKI ODA,SHUNSUKE,HORIENARIHISA HAMAMOTO.New berthing support system with starFire dGPS[C]//The 2004 International Symposium on GNSS/GPS,Sydney,Australia:University of New South Wales,2004:1-3.
[4]ADX.AD NAVIGATION 公司官方网站[EB/OL][2013-12-15].http://adnav.com/?catID=1220.
[5]E -SEA FIX PILOT.MARIMATECH 公司官方网站[EB/OL][2013-12-15].http://www.marimatech.com/products/piloting.
[6]HARBOURPILOT LIGHTWEIGHT.Navicom Dynamics公司官方网站[EB/OL][2013-12-15].http://www.navicomdynamics.com/mainmenu19/page76/HarbourPilot+Range.html.
[7]吴勇军.基于FSA的船舶引航系统的安全评估 [D].厦门:集美大学,2012:25.
[8]刘洋.大型船舶辅助靠泊仪的研究 [D].厦门:集美大学,2011:27-30.
[9]彭国均.大型船舶靠泊仪设计[J].交通运输工程学报,2012(6):1-4.