海上航拍图像目标定位算法的数据采集
2014-07-02兰培真张浩东
王 维,兰培真,张浩东
(集美大学航海学院,福建 厦门 361021)
0 引言
随着航空技术和遥感技术的不断发展,无人机航拍的应用领域日趋广泛.为有效提高海事监管搜救能力,解决传统海事巡航工作中航速慢、巡航半径较小、巡航船的视野较窄等问题,中国海事局在《海事系统“十二五”发展规划》中明确提出:在三大海区各配置2~3架固定翼飞机,用于在领海、毗连区、专属经济区承担海上污染监控、海上巡视、目标搜寻、信息搜集等任务[1].目前部分海事部门 (如长江海事局、浙江海事局)已开始使用无人机进行海事巡航工作的尝试.针对无人机海上航拍图像的目标定位问题,文献[2]提出了基于海上航拍图像的目标定位算法.该算法是根据无人机的空中位置和摄像机姿态等数据来进行海上目标定位的,同时必须确保数据的实时获取与同步存贮.为实际应用该算法,本文对相关信息的获取方法以及采集数据的设备进行研究,试从技术理论和实际应用两方面提出相应解决方案.
1 海上航拍图像定位算法所需数据
海上航拍图像定位算法源自遥感科学中的航空摄影测量学,算法的实现依托航拍视频图像中单张航摄图像的解析.确定图像中目标的位置信息,关键要确定航摄器材的摄影中心与图像在地面设定的空间坐标系中的位置与姿态,即内方位元素和外方位元素.
内方位元素是摄影中心与像片之间的位置参数,即摄影中心S到像片的主距f及图像中物标M在像片框坐标系中的坐标,如图1所示.
外方位元素则是航拍设备在拍摄成像瞬间所处的空间位置和姿态参数,包括三个直线元素和三个角元素.三个直线元素由所选取的地面空间坐标系中的Xm,Ym,Zm三个参数构成,如图2所示.其中m点为航拍工作进行中所拍摄的物标所处的空间地理位置,与图1中M点有别.三个角元素则由航拍设备在拍摄成像瞬间所处的姿态角φ(方向角)、θ(俯仰角)、φ(转动角)构成,描述了以航拍设备摄影中心为原点构成的航拍设备系统坐标系与地理空间坐标系之间的关系,如图3所示.航拍设备系统坐标固于设备,原点位于摄影中心处O,OXb沿设备横向轴指向右,OYb沿纵向轴指向前,OZb垂直于 OXb和OYb指向上;同时,作为对比参考的地理空间坐标系原点选取仍为摄影中心处,OX指向东,OY指向北,OZ沿垂向方向指天,也称为东北天坐标系.
方向角φ为航拍设备摄影中心纵轴OS在既定坐标系水平面上的投影与该坐标系对应的地理子午线之间的夹角,即绕Z轴转动的角度,理论上的角度定义域为0~360°.
俯仰角θ为航拍设备摄影中心纵轴OS与既定坐标系水平面之间的夹角,即绕X轴上下旋转的角度,理论上的定义域为-90°~+90°.
转动角φ为航拍设备摄影中心横轴OT与既定坐标系水平面之间的夹角,即绕Y轴上下转动的角度,理论上定义域为-180°~+180°.
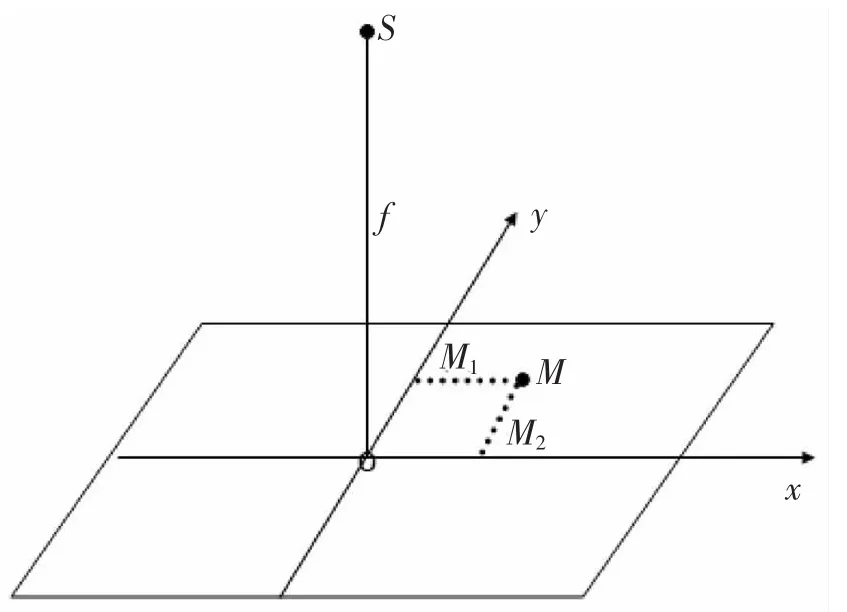
图1 内方位元素Fig.1 the inside azimuth elements
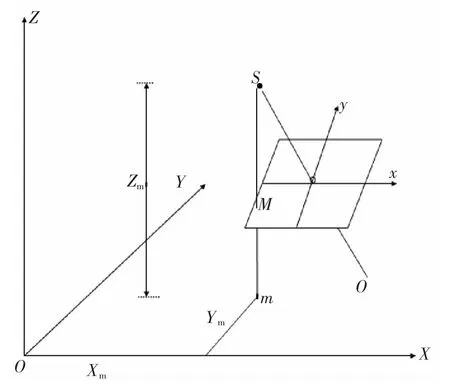
图2 外方位元素—直线元素Fig.2 the exterior orientation elements-linear elements

图3 外方位元素—角元素Fig.3 the exterior orientation elements-angular elements
2 算法数据采集方法
算法所需数据通过相关的传感器和测量设备获取.内方位元素与航拍设备有着密切的关系,在实际拍摄测量中一般为已知数据,但需要注意的是,像主点在制造航拍设备时一般是置于标框连线的交点处,在安装和使用过程中,往往像主点会发生偏移,其偏移的程度直接会影响到内方位元素的测量值,其测量精度将受到影响[3],需要航拍设备制造厂家或检测部门通过对摄像器材进行定期检测来确保精度.
外方位元素是用来确定航拍设备在拍摄瞬间的空间位置和姿态.目前,随着GPS定位技术的不断发展,为获取空间线元素提供了技术支持,可以用GPS来测定拍摄时航拍仪器的空间位置坐标.
对于角元素数据可用惯性导航系统 (INS)来获取,惯性导航系统的基本元件为加速计和陀螺仪等传感器,基本原理是通过传感器来测量载体运动状态,而根据载体的角速度和线性加速度随时间的变化,进行导航方程式积分计算得到载体相对于惯性坐标系统上姿态角.按照惯性量测单元 (IMU)的不同安装方式,可分为平台式系统和捷联式系统,其中平台式惯性导航系统由于其体积大、结构复杂、寿命短、耗电量大及价格昂贵等特性,不适于搭载在小型固定翼飞机或直升机上,因此获取算法所需的数据宜采用捷联式惯性导航系统,即将IMU安装于航拍设备之上,用数值计算来代替平台式导航仪的模拟转换功能[4].因而其耗能、成本、体积、质量都有大幅度的降低.
3 算法数据采集设备选型
由于内方位元素与航拍所采用的摄像设备有着直接的关系,属于设备固有属性.因此,在选择拍摄器材时应充分考虑到实际拍摄的高度、范围和持续时间等,以此来选择焦距和拍摄角等属性较为合适的设备.其中,为满足算法应用需求,实现图像内方位数据与外方位数据的同步存储,航拍设备应有外置录音功能 (有音频输入插孔)或可直接连接视频采集卡.为了减轻载荷,应该选择轻便的摄像设备.
在获取图像外方位数据中线元素数据 (航拍设备空间位置信息)时,可以采用GPS定位设备,GPS定位设备的核心芯片是评价该设备优劣的重要指标,世界上影响较大的GPS芯片制造厂商有SiRF、Garmin、u-blox、索尼、Nemerix、uNav等,其中美国产的SiRF和欧洲产的u-blox在其性能、市场占有率均十分引人注目[5].对SiRFstarⅢ和u-blox G5这两种较为典型芯片进行对比,两套定位设备的定位精度不相上下.由于航拍工作需要GPS模块具有低功耗、高灵敏度等特点,因此采用u-blox接收机更为合适.同时该设备的硬件和算法对于微弱信号的捕获和跟踪也有着较为合适的配置.随着Galileo系统在全球的使用,u-blox芯片其双模的特点也将拥有更为广阔的应用前景.
获取图像外方位数据中角元素数据可以采用捷联式惯性导航系统 (SINS),其工作原理是通过外部传感器提供的信息使用捷联姿态算法进行姿态估计,即解算姿态矩阵,并通过方向余弦法、欧拉角法的数学方法将姿态表示出来[4].能够提供姿态估计算法信息的传感器有陀螺仪、加速度计、GPS、磁强针、电子罗盘等,其中陀螺仪、加速度计和电子罗盘的应用较多.
由于外方位角元素数据的获取仅仅靠一种设备单独来进行是有局限性的,所以需要将各个设备的优点联合起来,相互补充.另外,陀螺仪的漂移误差存在随时间累积,且不易消除这一缺陷,在各个设备数据进行融合时也需要有一种算法对陀螺仪这一缺陷进行不断修正,以此来获得更为准确的数据.随着时代的进步,微机电系统 (MEMS)的出现实现了将各个传感器结合的设想,它是微电子技术结合精密机械技术发展起来的一个新领域,MEMS把低成本、功能可靠、复杂的微机电系统置于一块很小的芯片上,并将传感器和控制器与微电子元器件集成为一体,航姿参考系统 (AHRS)便是由微陀螺仪和微加速度计等MEMS惯性测量元件构成的微小型惯性导航系统,它利用微陀螺仪和微加速度计测出载体的角速度和加速度信号,经解算输出载体的实时姿态和航向等信息[6-7].另外,由于其成本低、体积小、质量轻、功耗低的优势也十分适合航拍工作.所以,获取角元素数据选用了
生产的Slim AHRS II型航姿参考系统惯性测量单元,其不仅具备了微三轴陀螺仪、三轴加速度计和三轴电子罗盘一系列MEMS惯性测量元件,并且在其芯片中载入了针对陀螺仪和加速度计的在线零点漂移和加速度干扰过滤算法.同时,在数据融合时采用了扩展卡尔曼滤波器算法,使得各元件之间的数据得到不断修正,保证了航向和姿态的准确实时输出[8].其工作原理如图4所示.

图4 Slim AHRS II型航姿参考系统工作原理图Fig.4 Working principle of Slim AHRS II
由于无人机搭载航拍器材进行拍摄时的机械抖动会影响到所拍摄的图像质量,因此,在工作中应注意:1)搭载前期通过机械振动测量的办法,找出无人机振动源点,搭载摄像设备时尽量避免与其重合,远离振动源点;2)通过机械防抖软件 (如SteadyMove Pro)处理拍摄完成后的图像,使其质量合乎算法的标准要求.
无人机航拍过程中实现海上航拍图像目标定位算法的数据采集设备应具有:1)体积小、质量轻.2)功耗低.由于无人机海上航拍历时长,因此在海上航拍应保持充足的电能保障,相关设备必须具有低功耗的特性,从而保证海上航拍工作的顺利进行.
4 结语
随着无人机航拍技术的不断发展,以及应用领域的不断拓宽,无人驾驶的固定翼飞机或直升机将成为海事监管搜救工作当中的“尖兵”,而海上航拍图像目标定位算法的研究很好地解决了在参照物稀少的海上环境中对航拍相关目标的定位难题.本文列出了应用该算法的关键数据种类,并提出了数据的采集方案,还从实际应用角度阐述了采集设备的选型原则.
海上航拍图像目标定位算法要求内、外方位元素数据在时间节点上必须保持高度同步,因而,视频图像和相关数据同步存储是下一阶段研究的重点.
[1]邓小明.浅谈无人机在海事监管的应用 [J].中国水运,2011,11(4):29-31.
[2]吕宇波,兰培真.基于航拍图像的海上目标定位算法研究 [J].上海海事大学学报,2011,32(4):28-31.
[3]李德仁,王树根,周月琴.摄影测量与遥感概论[M].北京:测绘出版社,2008:11-31.
[4]袁政.无人机航姿参考系统开发及信息融合算法研究[D].长沙:中南大学,2012.
[5]巴晓辉,李金海,陈杰.世界主流GPS芯片介绍[J].今日电子,2007(3):44-48.
[6]RIOS J A,WHITE E.Fusion Filter Algorithm Enhancements for a MEMS GPS/IMU [C].SanDiego,USA:ION NTM,2002.
[7]KOURE PENIS A,CONNELLY,SITOMER J.Low Cost MEMS Inertial Measurement Unit[C].[S.l.]:ION NTM,2004:26-28.
[8]张丽杰,常佶.微小型航姿测量系统及其数据融合方法 [J].中国惯性技术学报,2011,19(3):307-311.