一种精确测量螺旋桨重点位置的方法
2014-07-01孟现召仲志丹
孟现召, 仲志丹
(1.中国民航飞行学院洛阳分院机务工程部,河南洛阳471001;2.河南科技大学机电工程学院,河南洛阳471023)
一种精确测量螺旋桨重点位置的方法
孟现召1, 仲志丹2
(1.中国民航飞行学院洛阳分院机务工程部,河南洛阳471001;2.河南科技大学机电工程学院,河南洛阳471023)
螺旋桨作为一高速旋转部件,由于制造和装配误差,造成螺旋桨在装机后重心和旋转中心不重合,以及各桨叶上气动力不完全一致,从而使螺旋桨在高速旋转过程中产生振动。文中讨论一种精确测量螺旋桨重点位置的方法,可为正确进行螺旋桨动平衡提供参考。
螺旋桨;振动;测量;重点;方法
0 引言
在航空螺旋桨式动力装置上,由于螺旋桨横向尺寸大、叶片数目少,故单叶叶片的质量和承载相对较大。在实际制造和装配过程中,各桨叶的外形和质量分布不可能做到绝对一致,使得桨叶装配在桨毂上成为一件完整的螺旋桨以后,制造和装配误差会造成螺旋桨在装机后重心和旋转中心不重合,产生静不平衡;相对于静不平衡,在螺旋桨高速旋转过程中由于各桨叶的重心不在同一旋转平面上,以及各桨叶上气动力不完全一致引起各桨叶气动力的合力作用点偏离旋转中心,则产生动不平衡。所以在螺旋桨装机后的实际工作过程中产生的振动是动、静不平衡力的复合[1]。这种振动除了使航空器上乘员感到不适外,还使航空器相关部件承受很大的交变载荷,造成结构疲劳破坏,所以必须对螺旋桨进行动平衡配平,以降低其振动值水平。
以螺旋桨的旋转中心为中心、以螺旋桨桨毂周缘为圆周的圆平面上,螺旋桨重心所在半径就是螺旋桨的重点位置,与重点呈180°对称的半径就是轻点位置。在实际的工程实践中,对装机后的螺旋桨进行动平衡配平实际上就是先找到重点位置,再找到轻点位置,然后在轻点位置上安装合适重量的配重[2]。这就提出了两个方面的问题,即振动值的大小和重点的位置,其中振动值的大小可以直接由振动值传感器进行探测,故本文主要讨论如何对螺旋桨的重点位置进行精确测定。
1 螺旋桨-发动机振动系统的振型分析
由于螺旋桨的重心G偏离了其旋转中心D,设偏心距为e,螺旋桨质量为m,螺旋桨与发动机的总质量为M,螺旋桨转速为ω,则其离心力F=meω2,该力通过螺旋桨转轴沿法线方向经支撑轴承传递给发动机,使发动机以点O为中心、以r为半径进行同步弓形回旋运动,其运动特征是在转动中O、D、G三点保持固定的相对位置,如图1(a)。
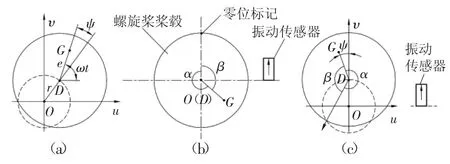
图1
以螺旋桨与发动机作为振动系统,用(u,v)表示螺旋桨旋转中心D的位置,则螺旋桨重心G的位置为(u+ecos(ωt),v+esin(ωt)),如图1(a);设阻尼为c,刚度为k,由牛顿第二定律得到发动机的运动微分方程为:

可见发动机的振动是频率与螺旋桨旋转同频、等幅、相位恒定的简谐振动,激振力是螺旋桨的偏心质量离心力F=meω2。
2 振动值量的测量
振动值传感器属于速度传感器,探测的是振动物体在单位时间内的振动位移;它具有方向性,在壳体上会有安装方向的标识。振动值传感器安装在发动机机匣上靠近螺旋桨安装法兰的位置[5],测量发动机机匣单位时间内的振动位移。在航空维修业内广泛地应用Chadwick Helmuth公司生产的Vibra2000型螺旋桨振动值测试仪,其配备的振动值传感器上就有一个箭头标记,要求安装时必须将箭头指向朝上安装[3],所以它只能正确探测竖直向上的振动。在本螺旋桨—发动机振动系统研究中,我们以该型传感器为例,只关心在竖直方向上发动机机匣的振动位移。

可见振动值传感器的输出波形是机匣振动位移波形的跟随。由于在实际进行动平衡配平时并不知道螺旋桨重点的位置,选取的零位参考标记具有随机性,即螺旋桨重点位置与参考零位标记二者所在半径之间夹角α一般不会恰好等于零,如图1(b),所以有α+β=2π,又有:

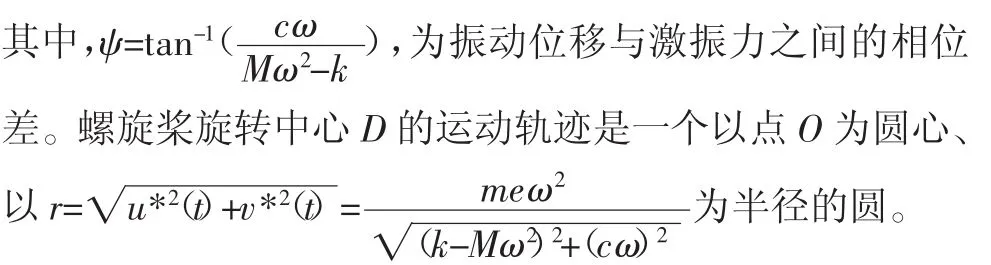
振动值传感器的方向性决定了其输出波形图为一余弦波的正半幅,如图2(c)。
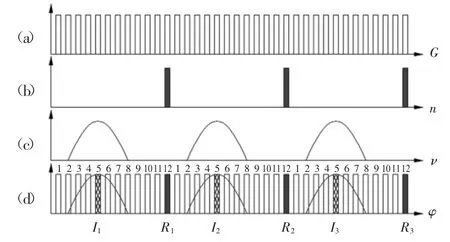
图2
振动值传感器只能输出振动值的大小,这对于进行螺旋桨的动平衡配平是不够的,如前所述,进行正确配平还需要知道重点的位置。
3 重点位置的测量
由于令ψ=0,所以当螺旋桨旋转中心O与螺旋桨重心G之间的有向线段OG方向与振动值传感器壳体上箭头方向一致时,振动值传感器输出信号幅值最大,如图1(c),此时有φ+α=2π,则φ=β。可见,只要测出β的大小,即可得到螺旋桨重点所在半径与参考零位标记之间的夹角,即可得到重点的位置。
要实施此项测量,需进行以下步骤:
1)时钟脉冲。时钟脉冲是由专门的时钟脉冲发生器产生的矩形脉冲,它的工作频率非常稳定和准确,如图2(a)。时钟脉冲的频率f为定值,根据式T=1/f可得到一个时钟脉冲所占用的时间,用来提供时间基准。
2)转速脉冲。转速脉冲来自转速传感器;视所采用的转速传感器的类型在桨毂上零点标记位置贴上反光铝箔或安装磁性块[3],总之需要使桨毂上的零点标记通过转速传感器探头时转速传感器即输出一个脉冲信号,如图2(b)。由计数器统计相邻两个转速脉冲Rn与Rn+1之间时钟脉冲的个数X,螺旋桨的转速n即可由式n=60f/X得到,单位为r/min。螺旋桨旋转一周零点位置经过转速探头一次,转速传感器输出一个脉冲信号,可见转速脉冲实际上起到了零位同步传感器的作用,它的出现标志着螺旋桨旋转中新的一转开始了。
3)振动脉冲。振动值传感器输出振动脉冲,然后由取样电路对其进行实时取样、保持和对比,获取其最大值,得到振动值的大小。
4)重点位置。如图2(c),从获取到一个转速脉冲Rn开始至获取到下一个转速脉冲Rn+1止,螺旋桨转过完整的一周,在这期间必然会有一个振动脉冲In出现;统计从转速脉冲Rn开始至振动脉冲In出现期间时钟脉冲的个数X1,统计振动脉冲In与一个转速脉冲Rn+1之间的时钟脉冲的个数X2,由式φ=2πX1/(X1+X2)得到角度β,则

就是说,从选定的零点位置所在半径开始,逆时针转动α角后就是重点所在的半径。
需要注意的是,本方法能够得出正确结果的前提是每相邻的两个转速脉冲Rn与Rn+1之间的时钟脉冲数目是相等的,即螺旋桨应该处于匀速转动的状态;如果螺旋桨处于加速或减速的过程中,将导致测出的∠α大小出现较大的偏差。
重点位置测出后,即可结合振动值传感器输出振动值的大小对螺旋桨进行动平衡配平。
[1] HartzellPropellerInc.HartzellPropellerOverhaulandMaintenance Manual(Revision 39)[M].Hartzell Propeller Inc.,2010.
[2] 葛漫江,王凯.螺旋桨振动的外场检测和排故[J].航空维修与工程,2001(3):44.
[3] Honeywell Aerospace.Chadwick Helmuth vibrex 2000 Operator’sManual[M].Honeywell Aerospace,2000.
[4] 林远东.偏心质量引起旋转系统振动的动力学研究[J].机械设计与制造,2008(5):29.
[5] 屈玉池,张永峰,赵述元,等.螺旋桨振动传递试验研究[J].航空发动机,2009,35(1):33-36.
(编辑:启 迪)
Accurate Detection Method of Heavy Spot on the Propeller
MENG Xianzhao1, ZHONG Zhidan2
(1.Maintenance Engineering Department,Luoyang College,Civil Aviation Flight University of China,Luoyang 471001,China; 2.College of Mechanical Engineering,Henan University of Science and Technology,Luoyang 471023,China)
Because of the errors in manufacturing and reassembling,the barycentre of the propeller will deviate from its rotation centre,and the aerodynamic force brought from every blade is not exactly the same,these factors will make the propeller vibrating when it is in high-speed rotating.A accurate detection method of heavy spot on the propeller is proposed to provide a good reference for the procedure of propeller dynamic balance.
propeller;vibration;detection;heavy spot
V 211.44
A
1002-2333(2014)04-0023-03
孟现召(1975—),男,工程师,研究方向为航空器维修;仲志丹(1975—),男,教授,博士学位,研究方向为工业自动控制系统、先进能源技术。
2014-02-07
