一种基于天空光的新型成像式仿生偏振导航传感装置*
2014-07-01褚金奎
李 彬, 关 乐, 刘 琦, 褚金奎
(大连理工大学 精密特种加工教育部重点实验室,辽宁 大连 116023)
一种基于天空光的新型成像式仿生偏振导航传感装置*
李 彬, 关 乐, 刘 琦, 褚金奎
(大连理工大学 精密特种加工教育部重点实验室,辽宁 大连 116023)
模仿昆虫偏振导航机理,设计了成像式仿生偏振导航传感装置样机。研究了天空光偏振分布模型,分析了成像式仿生偏振导航传感装置工作原理。解决了一般探测装置解算偏振参数需要上位机辅助的问题,使用CMOS图像传感器和数字信号处理器,实时输出导航角度。进行了室内、室外装置性能测试,获得了3个方向偏振分量标准化强度曲线。实验结果表明:传感装置室内外角度测量误差分别为-0.8°~0.3°,-1.2°~1.4°,能够较高精度地输出导航角度,可以满足实时导航定位的需要。
偏振导航; 天空光偏振分布模型; 数字信号处理器; CMOS图像传感器
0 引 言
现代生物学家通过研究发现,蜣螂等昆虫能够利用其偏振视觉(对天空光偏振方向极其敏感的视觉组织、器官与神经系统)分析天空中存在的一个相对稳定的偏振光(polarized light,POL)分布模式图来进行导航定位[1]。这种基于天空光的仿生偏振导航方式不受电磁干扰,误差不随时间累积,具有广阔的应用前景。
2000年,国外学者Lambrinos D与Möller R等人首先将昆虫偏振导航原理应用于机器人的开发中,研制了基于偏振光导航的Sahabot移动机器人[2]。国内,大连理工大学褚金奎教授课题组在国内首先于2004年开展了天空偏振光分布规律和偏振光多通道式仿生微纳导航传感器的研究,验证了仿生偏振导航的可行性[3,4]。
目前,国内外的研究主要集中在白天天空偏振光分布模式理论建模与测试、偏振导航传感器测角模型与误差分析以及考虑偏振导航增强的组合导航方法方面的研究[5~9]。对于微型化、单片集成化的成像式仿生偏振导航传感装置的研究尚处于初级阶段。
本文模仿昆虫偏振视觉结构,结合商用CMOS图像传感器与数字信号处理器(DSP)芯片研制了一种新型成像式仿生偏振导航传感装置样机,进行了导航角度输出测试。与传统的导航设备相比,它具有体积小、重量轻、集成度高、光敏感性能好、抗干扰能力强等优点。
1 天空光偏振分布模型
天空光的偏振现象是由于光被大气中粒子散射所引起的。大气中的光散射主要有Möll散射和Rayleigh散射。其中,Rayleigh散射是由比波长小得多的粒子引起的;而大气中的氧气、氮气分子都小于光波长,很好地符合了Rayleigh散射模型[10]。Rayleigh散射过程如图1所示。
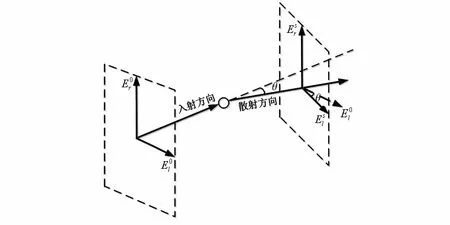
图1 Rayleigh散射过程示意图Fig 1 Diagram of Rayleigh scattering process

(1)
由上式可以看出:散射后光束的偏振分量不一定相等,即大气粒子的散射改变了光的偏振状态。
若以瑞利散射理论为基础,基于Stokes矢量方程和地平坐标系,可以计算偏振度和偏振方位角,建立天空光偏振分布模型。
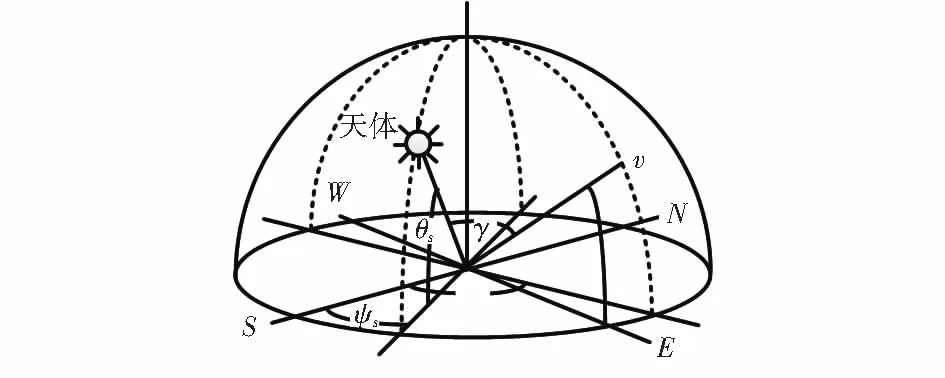
图2 地平坐标系Fig 2 Horizontal coordinate system
其中,θs为太阳高度角,ψs为太阳方位角,θ为测量高度角,ψ为测量方位角。当太阳S三维坐标为(r,θs,ψs)时,r为球体半径,空间任意一点R(r,θ,ψ)处偏振度为
P=Pmax(1-cos2y)/(1+cos2y).
(2)
其中
cosy=sinθssinθcosθscosθ.
该点处的偏振方位角为

(3)
由上式可以看到,在一天的一定时刻、一定位置,天空中具有相对稳定的光偏振分布模式,这个相对稳定的光偏振分布模式可以为导航提供所需的信息。
2 成像式仿生偏振传感装置工作原理
偏振光的数学描述一般采用电矢分量法、琼斯矢量法、斯托克斯矢量法及布卡尔球作图表示法4种方法。因为斯托克斯矢量在宏观上具有很好的可测量性,所以,这里使用它表征天空光的偏振态。在斯托斯矢量法中,光束可以用4个实数来表示,即
S=[I,Q,U,V]T.
(4)
其中,I为照射在像素单元上的天空光总强度,Q为0°方向线偏振光分量强度,U为45°线偏振光分量强度,V为圆偏振分量强度。
在大气偏振测量场合,圆偏振分量V的测量值几乎可以忽略。因此,若假设入射天空光的斯托斯矢量为S,当偏振片主透光轴与设定的零度参考线之间夹角为ψ,偏振片对其偏振状态的改变可以用MULLER矩阵表示[11],有

(5)
因为成像式仿生偏振传感装置可以直接测量的是光的总强度I,所以,在这里只关心MULLER矩阵的第一行,即

(6)
因此,只要测量3个不同ψ角下出射光束的强度,就可以联立求解出入射光束的I,Q,U。选取ψ角,0°,45°,90°,得方程组
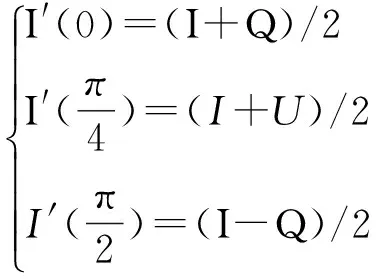
(7)
整理可得

(8)
进而得入射光束的偏振方位角χ等参数

(9)
由于一定时间、地点的天空光偏振状态是固定的,因此,由上式就可以计算相应位置的导航角度。但偏振参数的解算是一项繁琐的工程,一般探测装置仍需要上位机辅助,成像式仿生偏振导航传感装置硬件核心拥有DSP,能够独立完成参数计算,从而实时有效地输出导航角度。
3 成像式仿生偏振导航传感装置设计
3.1 硬件设计
传感装置的硬件设计如图3所示。

图3 传感装置硬件框图Fig 3 Hardware block diagram of sensing device
整个系统主要由CMOS图像传感器与DSP组成。DSP通过I2C接口控制CMOS图像传感器的像素时钟和采集触发,并从CMOS图像传感器提取偏振强度数据进行计算。
偏振参数的解算需要实时刷新采集数据,进行高强度数据解析,对运算处理速度要求很高,且图像处理系统计算结果需要随时通过串口或网口发送至上位PC机。因此,选择TI公司生产的TMS320DM642作为核心芯片,它具有运算速度快,外设资源丰富等特点。
图像采集部分使用镁光公司生产的MT9M001图像传感器。MT9M001是一种高性能帧曝光CMOS图像传感器,分辨率为1280像素×1024像素,像元尺寸为5.2μm×5.2μm,且帧频可编程。数据存储部分采用大容量、低成本的SDRAM(同步动态随机存储器)芯片,其能够很好地实现与DSP的无缝连接。
3.2 软件设计
传感装置软件设计采用模块化的设计思路,整个软件系统按照实现功能不同划分成不同模块。实际运行过程中,硬件中断、软件中断及任务线程按照优先级调用各模块,实现相应的功能。如利用I2C等接口协议,实现偏振图像数据的获取、传输和处理、偏振图像斯托克斯矢量参数计算、偏振度和偏振方位角的计算等功能。
具体装置软件流程为:
1)天空光经过偏振片过滤后,照射在CMOS图像传感器感光区域上,输出含有偏振信息的数字图像;
2)利用嵌入式DSP完成含有天空光偏振信息的数字图像中偏振像素单元偏振方位角χ的提取;
3)再根据瑞利散射理论、斯托克斯矢量方程和地平坐标系,利用天体理论中相关公式,结合提取的偏振像素单元偏振方位角χ得到零度参考线与地理正北方向夹角等航向信息;
4)最后,通过网口或串口将导航角度发送至上位PC上显示输出,实现导航定位的目的。
其工作流程图如图4。
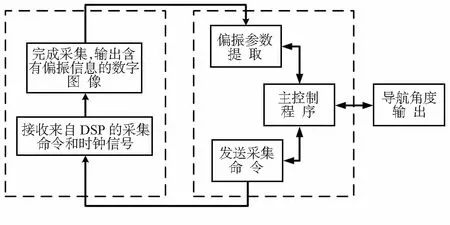
图4 传感装置工作流程图Fig 4 Work flow chart of sensing device
4 实验测试
4.1 室 内
搭建的成像式仿生偏振导航传感装置模型如图5。

图5 成像式仿生偏振导航传感装置模型Fig 5 Imaging bionic polarization navigation sensing device model
成像式仿生偏振导航传感装置在室内进行性能测试时,通过积分球得到的稳定的均匀光源,在光源出口位置加上线偏振器得到线偏振光,将待测试装置放在精密转台上固定,通过旋转转台使装置获得不同方向的偏振光。入射光电矢量方向变化步长为10°,测量0°~170°内共18个不同方向。
CMOS图像传感器上覆盖具有0°,45°,90° 3个不同方向的偏振片,如图6。

图6 偏振片结构示意图Fig 6 Diagram of polarizer structure
一定方向偏振光测量时,CMOS图像传感器可以同时获得3个不同方向偏振分量强度信息,强度曲线如图7。
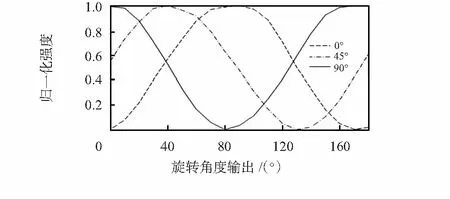
图7 归一化的不同方向偏振分量的强度曲线(室内)Fig 7 Normalized intensity curve of polarized component in various directions(indoor)
根据强度数据,计算得入射光束偏振方位角χ等偏振参数,使用最小二乘支持向量机法进行补偿后,其误差曲线如图8。
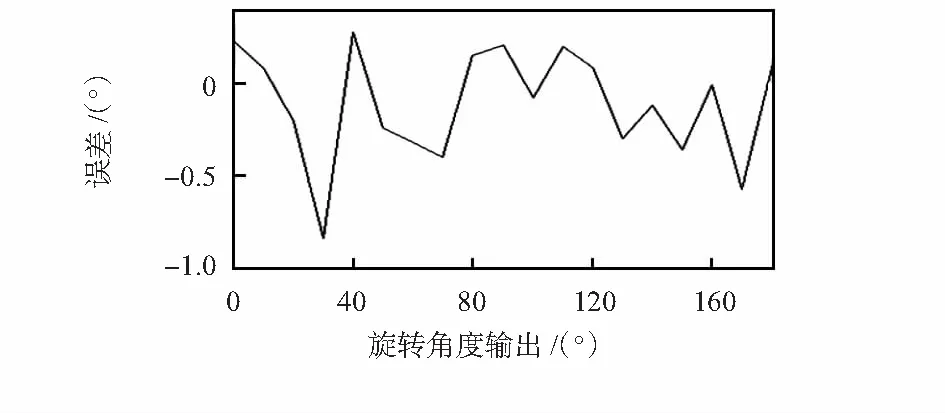
图8 误差曲线(室内)Fig 8 Curve of error (indoor)
4.2 室 外
成像式仿生偏振导航传感装置在室外测试,地点大连理工大学机械栋楼南侧停车场,时间2013年11月19日下午3点,光源为天空光,将传感装置固定在精密转台上,旋转转台,入射光束偏振方向相对变化步长为10°,测量0°~160°内共17个不同的偏振方向,CMOS图像传感器上覆盖室内相同的具有0°,45°,90° 3个不同方向的偏振片。天空光测量时,CMOS图像传感器可以同时获得3个不同方向偏振分量的强度信息,强度曲线如图9。

图9 归一化的不同方向偏振分量的强度曲线(室外)Fig 9 Normalized intensity curve of polarized component in various directions(outdoor)
根据强度数据,计算得入射光束偏振方位角χ等偏振参数,使用最小二乘法进行补偿后,其误差曲线如图10。

图10 误差曲线(室外)Fig 10 Curve of error (outdoor)
5 结 论
本文模仿昆虫偏振视觉结构设计的成像式仿生偏振导航传感装置样机,结合了CMOS图像传感器和DSP,在保证装置实时处理性能基础上,获得了更多点的天空光偏振信息。经过实验测试,成像式仿生偏振导航传感装置角度测量误差室内为-0.8°~0.3°,室外为-1.2°~1.4°,能够较高精度地输出导航角度,可以满足实时导航定位的需要。
[1]ByrneM,DackeM,NordströmP,etal.Visualcuesusedbyball-rollingdungbeetlesfororientation[J].JournalofComparativePhysiologyA,2003,189(6):411-418.
[2]LambrinosD,MöllerR,LabhartT,etal.Amobilerobotemployinginsectstrategiesfornavigation[J].RoboticsandAutonomousSystems,2000,30(1):39-64.
[3] 褚金奎,赵开春.仿昆虫复眼偏振敏感测角光电模型研究[J].微纳电子技术,2005,42(12):541-545.
[4]ChuJ,ZhaoK,ZhangQ,etal.Constructionandperformancetestofanovelpolarizationsensorfornavigation[J].SensorsandActuatorsA:Physical,2008,148(1):75-82.
[5] 晏 磊,关桂霞,陈家斌,等.基于天空偏振光分布模式的仿生导航定向机理初探[J].北京大学学报:自然科学版,2009(4):616-620.
[6] 赵开春,卢 皓,尤 政.天空光偏振模式自动探测装置[J].光学·精密工程,2013,21(2):239-245.
[7] 李明明,卢鸿谦,王振凯,等.基于偏振光及重力的辅助定姿方法研究[J].宇航学报,2012,33(8):1087-1095.
[8] 王 威,褚金奎,崔 岩,等.基于矢量辐射传输的大气偏振建模[J].中国激光,2013(5):215-221.
[9]WehnerR.Polarizationvision:Anuniformsensorycapacity[J].JournalofExperimentalBiology,2001,204(14):2589-2596.
[10] 姚弘轶.面向仿生微纳导航系统的天空偏振光研究[D].大连:大连理工大学,2006.
[11] 阿扎姆,AzzamRMA,巴夏拉,等.椭圆偏振测量和偏振光[M].北京:科学出版社,1986.
A novel imaging bionic polarization navigation sensing device based on skylight*
LI Bin, GUAN Le, LIU Qi, CHU Jin-kui
(Key Laboratory of Technology Precision & Non-traditional Machining of Ministry of Education,Dalian University of Technology,Dalian 116023,China)
A novel imaging bionic polarization navigation sensing device proto is designed by employing insect strategies for navigation.The skylight polarization distribution model is studied,and work principle of imaging bionic polarization navigation sensing device solves is analyzed.The problem of normal detection device polarized parameters needs upper PC aided,by using CMOS sensor and DSP,real time output navigation angle.Performance experiments are presented indoor and outdoor,and normalized intensity curves of the polarized component in three directions are obtained.Experimental result indicates that error of angle measurement of sensing device is -0.8°~0.3°(indoor) and -1.2°~1.4°(outdoor),it can output navigation angle with high precision and meet requirement of realtime navigation.
polarization navigation; skylight polarization distribution model; DSP; CMOS image sensor
10.13873/J.1000—9787(2014)08—0069—04
2014—01—15
国家自然科学基金资助项目(51305057);国家重点基础研究发展计划资助项目(2011CB302105)
TP 212
A
1000—9787(2014)08—0069—04
李 彬(1989- ),男,湖南湘潭人,硕士研究生,研究方向为成像式仿生偏振导航传感装置。
