基于高度角的GPS单点定位随机模型研究
2014-07-01张莎莎郑黄成王铭恺
张莎莎,郑黄成,李 信,刘 聪,王铭恺
(合肥工业大学土木与水利工程学院,安徽合肥 230009)
基于高度角的GPS单点定位随机模型研究
张莎莎∗,郑黄成,李 信,刘 聪,王铭恺
(合肥工业大学土木与水利工程学院,安徽合肥 230009)
GPS单点定位精度与误差方程的权矩阵相关,合理的定权随机模型能够提高定位精度。目前在用伪距法绝对定位方法解算测站坐标中,定权标准并不统一。通过对基于高度角的GPS单点定位定权随机模型进行研究分析,提出一种新的随机模型,以提高静态单点定位精度。
GPS单点定位;静态绝对定位;高度角;随机模型
1 引 言
GPS绝对定位也叫单点定位,即利用GPS卫星和接收机之间的距离观测直接确定用户接收机的绝对位置。对GPS用户来说,在实际应用中单点定位精度越高越好。但因为受到卫星轨道误差、钟差以及信号传播误差等因素的影响,静态绝对定位的精度仅约为米级。为了提高定位精度GPS定位要求建立函数模型和随机模型[1]。
目前,国内外现有的GPS单点定位随机模型主要有等权模型、卫星高度角定权[1,2](主要为基本函数法、经验函数法)以及GPS/GLONASS组合定位用先验定权方式建立随机模型[3],但是这些模型对精度的提高存在局限性,本文的研究目的在于寻找一种新的基于高度角的GPS单点定位随机模型,提高定位精度。
2 基于高度角的GPS单点定位随机模型
2.1 GPS单点定位原理
伪距法定位是由GPS接收机在某一个时刻测出得到4颗以上GPS卫星的伪距以及已知的卫星位置,采用空间距离后方交会的方法求定测站点的三维坐标。
伪距定位观测方程:卫星的坐标(XS,YS,ZS),接收机坐标(X,Y,Z),接收机钟差σtk,j为卫星数,j=1, 2,3,…,ρ′为伪距观测值,σρ1,σρ2分别为电离层和对流层的改正项,为卫星钟差,则:

上式即为伪距定位的观测方程组。

则线性化的形式为:(令c·σtk=σρ)
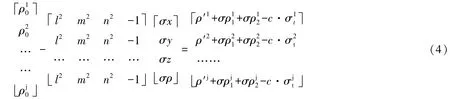

解算过程:首先假设地面初始坐标为(0,0,0)根据方程式(4)和方程式(5)求解坐标改正量,改正初始坐标,并对以上步骤进行迭代计算直到相邻两次坐标差小于10e-5;用广播星历进行卫星钟差改正、电离层延迟误差改正采用Klobuchar模型[4]、对流层改正采用Hopfield模型。
2.2 基于高度角的Ln函数随机模型
不同卫星发射的信号,传播路径不同,相应的观测值精度也不相同。对流层延迟误差随着卫星高度角的减小而逐渐增加,卫星高度角高的信号质量通常优于卫星高度角低的信号[5]。
在此基础上,经过研究试验提出了Ln函数随机模型:

其中:σA,K为卫星观测值中误差,为观测卫星高度角,σ0为单位权中误差。

图1 函数模型图
3 数据处理及分析
2013年10月27日10:00~2013年10月27日10:25合肥工业大学CORS站的GPS观测数据。参考坐标采用GAMIT软件联合IGS站数据解算得到,精度较高,可作为真实坐标。
分别利用等权模型,sin函数模型,Ln函数模型计算50历元的观测数据(观测间隔为30 s),将各模型计算的每组数据导入Matlab中绘制x,y,z各方向的坐标残差走势曲线进行精度比较,如图2所示。另外计算出各模型的内﹑外符合精度如表1所示。
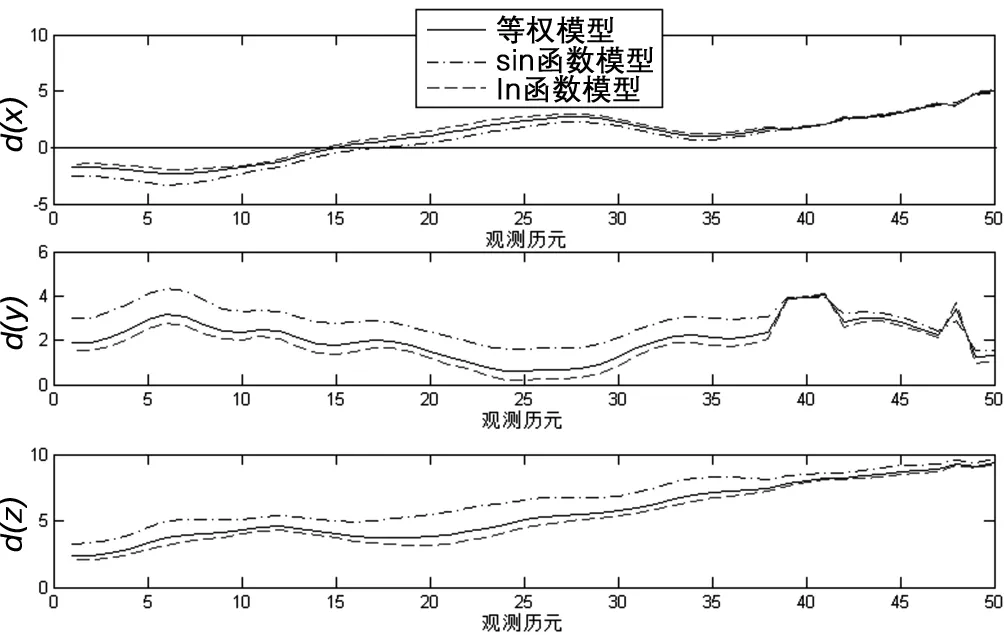
图2 坐标残差图

表1 内(外)精度符合精度表
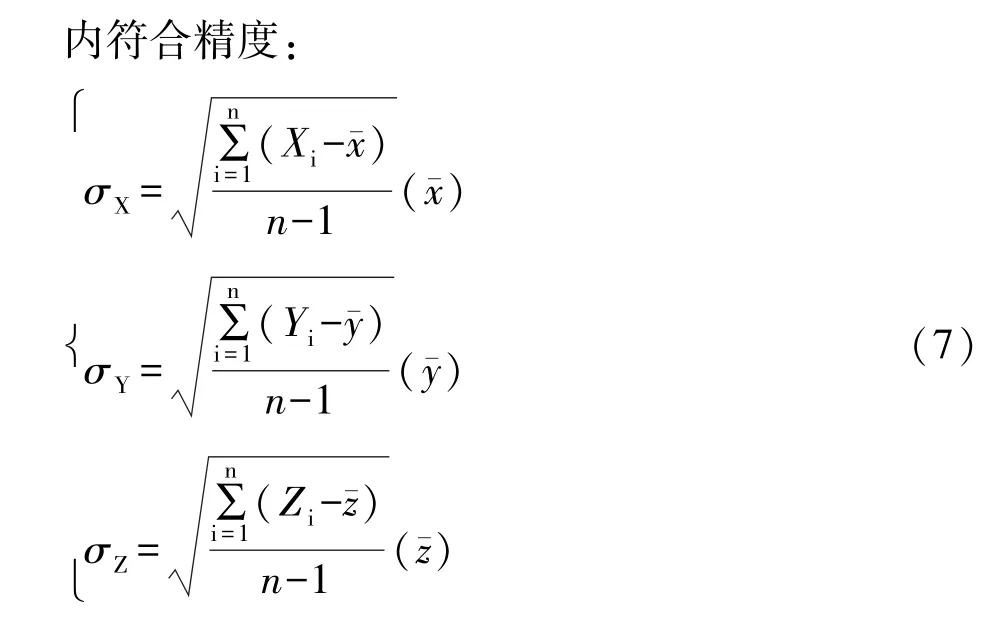
外符合精度:将内符合精度计算公式中的平均值(¯x、¯y、¯z)替换为实际坐标(X、Y、Z)。由图2可以看出Ln函数模型坐标残差值小于等权模型及Sin函数模型的坐标残差值;由表1可以看出Ln函数模型的内符合精度与等权模型、Sin函数模型相差不大,但外符合精度明显较高;综上分析,Ln函数模型对静态单点定位精度的提高明显优于等权模型及Sin函数模型。
4 结 论
本文所提出的Ln函数随机模型相比于与等权模型与Sin函数模型定位精度有所提高。此外本文提出的Ln函数随机模型也适用于GLONASS、北斗等卫星导航系统的单点定位。
[1] 徐鹏.基于卫星高度角的GPS观测量随机模型分析[J].测绘技术装备,2013,15(1).
[2] 戴吾蛟,丁晓利,朱建军.基于观测值质量指标的GPS观测量随机模型分析[J].武汉大学学报·信息科学版, 2008,33(7).
[3] 高晓,戴吾蛟.GPS/GLONASS单频伪距单点定位的权比分析[J].全球定位系统,2013,38(3).
[4] 徐绍铨,张华海,杨志强等.GPS测量原理及应用(第三版)[M].武汉大学出版社,2008.
[5] 刘志强,黄张裕,金建平.利用卫星高度角和信噪比提高GPS定位精度的试验分析[J].测绘工程,2008,17(4).
Research of the Stochastic Model of GPS Standalone Based on Satellite Elevation Position
Zhang Shasha,Zheng Huangcheng,Li Xin,Liu Cong,Wang Mingkai
(School of Civil Engineering,Hefei University of Technology,Hefei 230009,China)
The accuracy of GPS Standalone Position has relevance to the weight matrix of the error equations.So the reasonable stochastic model can improve the positioning accuracy.The standards of determining weight are not unified by using pseudo-range method to calculate station coordinates.By researching the stochastic model of GPS Standalone based on satellite elevation position,a new method is proposed to improve the accuracy of the Static Absolute Position.
GPS standalone position;static absolute position;satellite elevation;the stochastic model
2014—03—05
张莎莎(1993—),女,测绘工程专业大学本科学生,研究方向:GPS单点定位应用研究。
合肥工业大学校级创新项目(2013CXSY276)
