基于RTKLIB的精密单点定位研究
2014-07-01丁慧君
丁慧君,罗 端,卢 兵
(1.内蒙古自治区测绘院,内蒙古呼和浩特 010051; 2.长江宜昌航道工程局,湖北宜昌 443000; 3.中国建筑第五工程局有限公司,湖南长沙 410004)
基于RTKLIB的精密单点定位研究
丁慧君1∗,罗 端2,卢 兵3
(1.内蒙古自治区测绘院,内蒙古呼和浩特 010051; 2.长江宜昌航道工程局,湖北宜昌 443000; 3.中国建筑第五工程局有限公司,湖南长沙 410004)
研究利用开源免费GNSS数据处理软件RTKLIB进行PPP解算,阐述了RTKLIB精密单点定位中使用的数据预处理方法以及电离层、对流层、频间偏差等误差项的采用的改正方法,设计了精密单点定位的解算策略并配置了RTKLIB软件界面中的关键参数,对4个IGS测站实测数据进行了PPP定位解算,结果表明:利用RTKLIB软件采用设计的PPP解算策略处理静态数据,静态PPP的收敛时间大约为15 min(到分米级),试验中定位精度可达到厘米级。
RTKLIB;精密单点定位;PPP
1 引 言
当前,IGS(International GNSS Service)对各类产品解算进行了不断的改进,GNSS定位技术也进入了一个新阶段,精密单点定位(Precise Point Positioning,PPP)技术就是其代表之一。PPP技术不需要参考站或参考网络的参与,提供GPS卫星钟差和卫星精密星历改正数据后,利用单台高精度双频GPS接收机的载波相位和非差伪距观测值即可实现高精度定位。这种方式大大降低野外实测的费用,同时也极大地提高了GPS精密定位操作上的灵活性。
目前,精密单点定位数据处理软件已被国外多家公司与研究机构推出,例如:GrafNav 7.8、加拿大APPLANiX公司推出的POSPacAIR、挪威TerraTec公司推出的TerraPOS软件、瑞士Leica公司的IPAS,但GrafNav,POSPacAIR,TerraPOS,IPAS都是商用软件,价格较为昂贵且不提供源代码[4]。张小红教授开发的TriP是国内首款高精度的商用精密单点定位软件[5],其源代码不公开。RTKLIB是由日本学者Tomoji Takasu开发的具备GPS、GLONASS、GALILEO、BDS四系统联合定位的软件,包含PPP模块。与GrafNav,POSPacAIR,TerraPOS, IPAS,TriP软件相比,RTKLIB软件最大的优势在于免费,且所有源代码公开、便于学习研究和算法测试,界面友好。探讨RTKLIB软件使用的模型改正、参数配置、解算策略,分析RTKLIB PPP定位结果精度,对于使用RTKLIB开展PPP解算具有重要意义,同时对于生产单位探索PPP技术及工程应用具有较好的参考价值。
2 精密单点定位数学模型
GPS伪距观测值观测方程如式(1)所示,GPS载波相位观测值如式(2)所示。

式中,Pi、Φi分别为伪距观测值和载波相位观测值;ρ为GPS接收机和卫星间的几何距离;c为真空中的光速;dt为接收机钟差;dT为GPS卫星钟差;dorb为GPS卫星轨道误差;dtrop为对流层延迟;dion/i为Li频率i=1,2上的电离层延迟;λi为Li载波波长;Ni为整周模糊度;ε(Pi)为多路径和伪距观测噪声误差;ε(Φi)为多路径和载波相位观测噪声误差。
RTKLIB中采用无电离层组合形成观测方程,其观测模型的简化形式如下[2]:


3 数据预处理
从RTKLIB代码中可以看到,在RTKLIB预处理模块中,采用的是L1-L2 geometry free法、LLI周跳探测法,不进行周跳修复,只探测周跳。
4 误差改正
4.1 电离层时延改正
在RTKLIB软件的精密单点定位中,采用式(3)、式(4)的无电离层组合,在无电离层组合中,一阶电离层影响被消除,残余的高阶项误差大约为1~4cm,因此,电离层影响改正项在PPP中就可以不再考虑。需要注意的是,双频无电离层组合放大了观测噪声。
4.2 硬件延迟偏差改正(DCBs)
不同频率的载波以及不同类型的测距码的硬件延迟不同,设C1、P1、P2对应的硬件延迟分别为BC1、BP1、BP2,硬件延迟偏差BP1-P2、BP1-C1可达十几个纳秒,相当于几米,这对于PPP是不可忽视的,对单频PPP用户更是需要考虑。IGS的精密钟差产品是基于无电离层组合观测值解算的,因此为正确使用IGS精密钟差产品,对于单频用户而言,必须在卫星钟差上加上一个改正数:

5 算例分析
5.1 解算策略
在RTKLIB中采用的是扩展卡尔曼滤波方法,详细解算策略如表1所示。
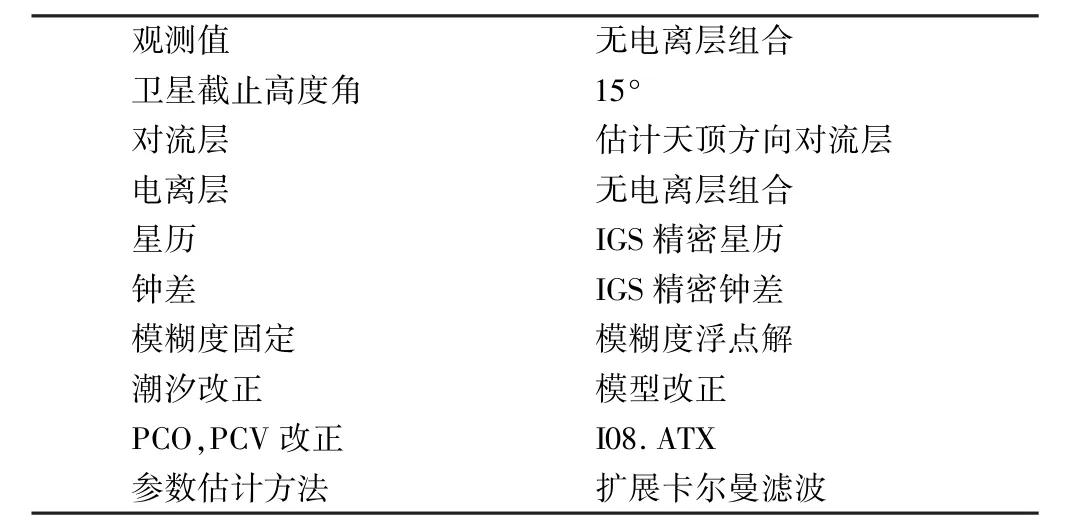
表1 解算策略
RTKLIB关键参数配置如图1~图4所示。
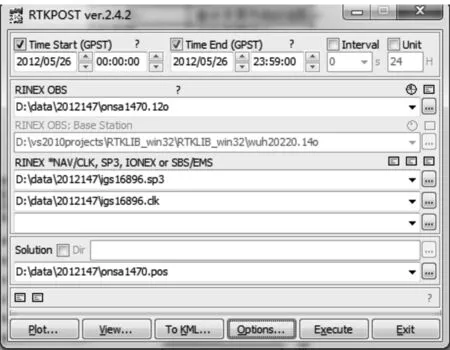
图1 RTKLIB配置界面1

图2 RTKLIB配置界面2
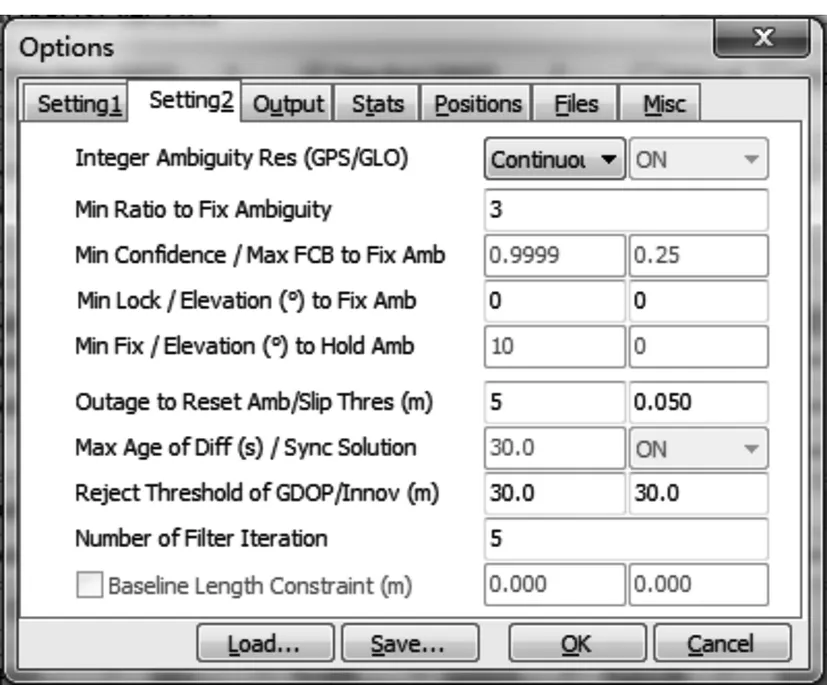
图3 RTKLIB配置界面3

图4 RTKLIB配置界面4
5.2 解算结果分析
按照以上解算策略,处理了IGS跟踪站OPTM、ZIMM、MDVJ、ONSA四个测站2012年第147天的数据,从IGS 1689周SINEX文件中提取站坐标作为已知值,将解算结果与已知值作差,再进行坐标系转换,得到NEU三个方向的定位误差。
结果表明,利用RTKLIB软件采用表1所示PPP解算策略处理静态数据,静态PPP的收敛时间大约为15 min(到分米级),试验定位精度ENU方向可达到厘米级,4个测站分布在全球不同区域,均获得了厘米级的定位精度。在实际工程应用中,当测区范围内无高精度已知点且对定位精度要求不太高时,可用该策略建立基准点,用于RTK作业等,具有较好的现实意义和应用价值。

图5 OPTM站2012年147天PPP误差
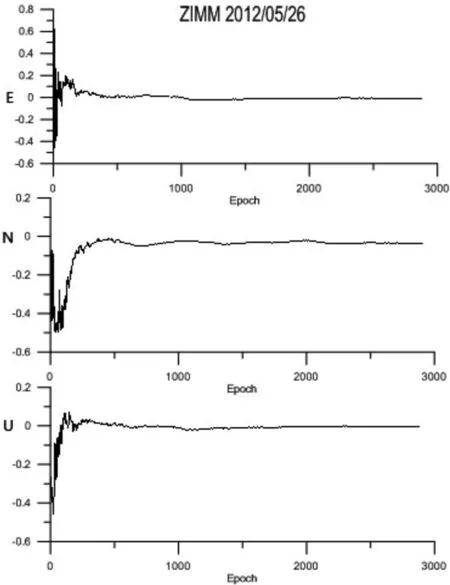
图6 ZIMM站2012年147天PPP误差

图7 MDVJ站2012年147天PPP误差

图8 ONSA站2012年147天PPP误差
[1] Zumberge J F.Automated GPS Data Analysis Service[J].GPS Solutions,1999,2(3),76.
[2] Kouba J,Heroux P.Precise Point Positioning Using IGS Orbitand Clock Products[J].GPS Solutions,2001,5(2):12~28.
[3] Gao Y,Shen X.Improving Ambiguity Convergence in Carrier Phase-based Precise Point Positioning[C].ION GPS 2001,Salt Lake City,USA,2001.
[4] 刘经南,叶世榕.GPS非差相位精密单点定位技术探讨[J].武汉大学学报·信息科学版,2002,27(3):223~240.
[5] 叶世榕.GPS非差相位精密单点定位理论与实现[D].武汉:武汉大学,2002:25~27.
[6] 李玮.GPS精密单点定位算法研究与软件实现[D].北京:中国测绘科学研究院,2010:35.
[7] Satirapod C.General Report:Precise single point positioning software[C].School of Geometric Engineering,The University of New Source Wales,1998:12~15.
[8] Gao Y,James F M.Single-Point GPS Positioning Accuracy Using Precise GPS Data.The Australian Surveyor,1997,42 (4):185~192.
Precise Point Positioning Based on RTKLIB
Ding Huijun1,Luo Duan2,Lu Bin3
(1.Inner Mongolia Surveying and Drawing Institute,Hohhot Inner Mongolia 010051,China; 2.Changjiang Yichang Waterway Engineering Bureaus,Yichang 443000,China; 3.China Construction Fifth Engineering Division Corp.,Changsha 410004,China)
In order to develop Precise Point Positioning work using free open source RTKLIB,introduced the adopted data pre-processing method,the ionosphere,troposphere,DCB model of RTKLIB PPP.Designed a PPP positioning strategy and configured the key parameter of RTKLIB software.Four stations’field measured data were processed for PPP.The results show that convergence time of static PPP is about 15 min(to decimeter level)using designed RTKLIB PPP positioning strategy,positioning accuracy reach cm level.
RTKLIB;precise point positioning;PPP
2014—03—13
丁慧君(1986—),男,助理工程师,主要从事GPS数据采集与数据处理工作。
