合肥市轨道交通3号线GPS控制网建立
2014-06-28付先国
付先国
(合肥市测绘设计研究院,安徽 合肥 230061)
1 引 言
合肥市轨道交通3 号线线路全长37.3 km,其中高架线4.46 km,地下线32.84 km(含U 形槽)。全线共设有车站33 座包括换乘站7 处,分别为:翡翠中路站、祁门路站、望江西路站、潜山路站、蒙城路站、合肥火车站站、北二环路站。其中高架站4 座,地下站29座。平均站间距为1 149 m,最大站间距1 720 m,最小站间距740 m。线路于北端设磨店车辆段,南端设翡翠湖停车场。线路起于职教园相城路站,沿淮海大道→文忠路→包公大道→北二环→铜陵北路→站前路→新蚌埠路→临泉路→潜山路→天鹅湖路→翡翠路布设,止于方兴大道站。途径职教园、瑶海工业区、火车站地区、政务新区、经济开发区及大学城等区域。
2 GPS 控制网设计
2.1 基准设计
《城市轨道交通工程测量规范》要求,若城市轨道交通工程线路轨道的平均高程与城市投影面高程的高差影响每千米大于5 mm时,应采用其线路轨道平均高程作为投影面高程。
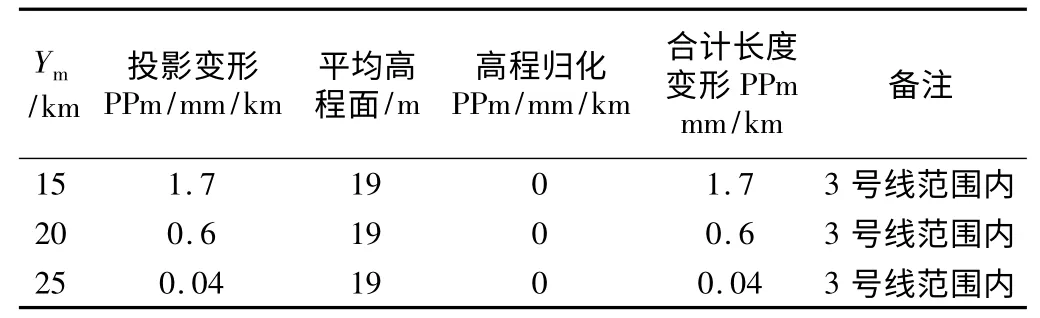
(1)合肥市城建坐标系统参数为:中央子午线为117°,投影面为参考椭球面,参考椭球为克拉索夫斯基椭球,投影方式为高斯投影。轨道3 号线工程范围距离中央子午线117°约为15 km~40 km之间,工程平均高程为吴淞高程19 m(距参考椭球面高度69 m)。因此,轨道3 号线工程平均高程面上横向东西跨度每千米长度的投影变形和高程归化改正值如表1 所示:
表1 中,3 号线工程范围内部分范围东西向的横向跨度范围每千米长度合计变形大于5 mm,超过《城市轨道交通工程测量规范》要求。因此,必须建立新的轨道交通3 号线工程平面坐标系统及参数。
(2)通过调整中央子午线和投影面的高程,建立轨道交通3 号线工程平面坐标系统及参数,使得:①城市轨道交通3 号线工程线路长度的高程归化影响值每千米小于5 mm;②城市轨道交通3 号线工程线路长度的投影变形影响值,每千米小于5 mm;③尽量使长度的高程归化值和投影变形值的合计影响值最小。
(3)合肥市轨道交通3 号线工程平面坐标系统的参数:①1954年北京坐标系(克拉索夫斯基椭球,高斯投影);②中央子午线:117°17″;③投影面:吴淞高程19 m,即投影面大地高69 m。
在合肥市轨道交通3 号线工程平面坐标系统下的变形改正值如表2 所示:
工程坐标系下长度变形分析表 表2

续表2
满足规范投影变形的要求。
(4)换算与转换方法:①坐标换带:按高斯换带公式计算,消除投影变形的影响;②投影面的转换计算采用椭球膨胀法,计算椭球长半轴膨胀大小的方法有多种,本项目转换采用如下方法:da=dH,dα=0。即新椭球的扁率不变,投影面大地高的变化量为长半轴的增量。
2.2 指标设计
轨道交通GPS 控制网主要技术指标符合下表的规定。

卫星定位控制网主要技术指标表 表3
3 选点与埋石
共埋设卫星定位控制点81 个,其中共用2 号线卫星定位点3 个,共用1 号线卫星定位点2 个。81 个点位中,埋设地面混凝土标石63 个,楼顶标石18 个。卫星定位控制点的选点埋设符合如下要求:
(1)一对控制点间必须确保通视,3 个及以上控制点两两通视;
(2)控制点选在利于长期保存、施测方便和施工影响范围以外的地方;
(3)控制点附近没有大面积水域或电磁波反射(或吸收)强烈的物体;控制点与无线电发射装置的间距小于200 m,与高压输电线的间距小于50 m;
(4)控制点布设在隧道出入口、竖井或车站附近,车辆段附近布设3 个~5 个控制点;
(5)与合肥市轨道交通1、2、4、5、6、7 号线交叉联络处布设2 个以上的重合点。
4 外业观测
本次外业观测共计88 个点位,其中7 个为起算点(1 个为CORS 基站),81 个为待定点。考虑GPS 网的整体精度,先由CHDS、GS06、GS11、GS16、GS26、GS48、16 共7 个起算点组成2 个时段的框架网进行观测,每时段观测4 h。其余的按《城市轨道交通工程测量规范》要求,采用边连式或网连式进行逐步推进,短边每个时段观测时间不少于1 h,长边观测时间不少于120 min。观测完后对局部几何图形强度不好的进行了补测,对观测质量差的基线进行了重测。
外业观测使用8 台Leica GPS 接收机,其中GS14型接收机5 台,1230GG 型接收机1 台,1230 型接收机2 台。观测前在接收机内设置卫星高度角(15°)、数据采样间隔(10 s)。
GPS 控制网联测示意图如图1 所示。
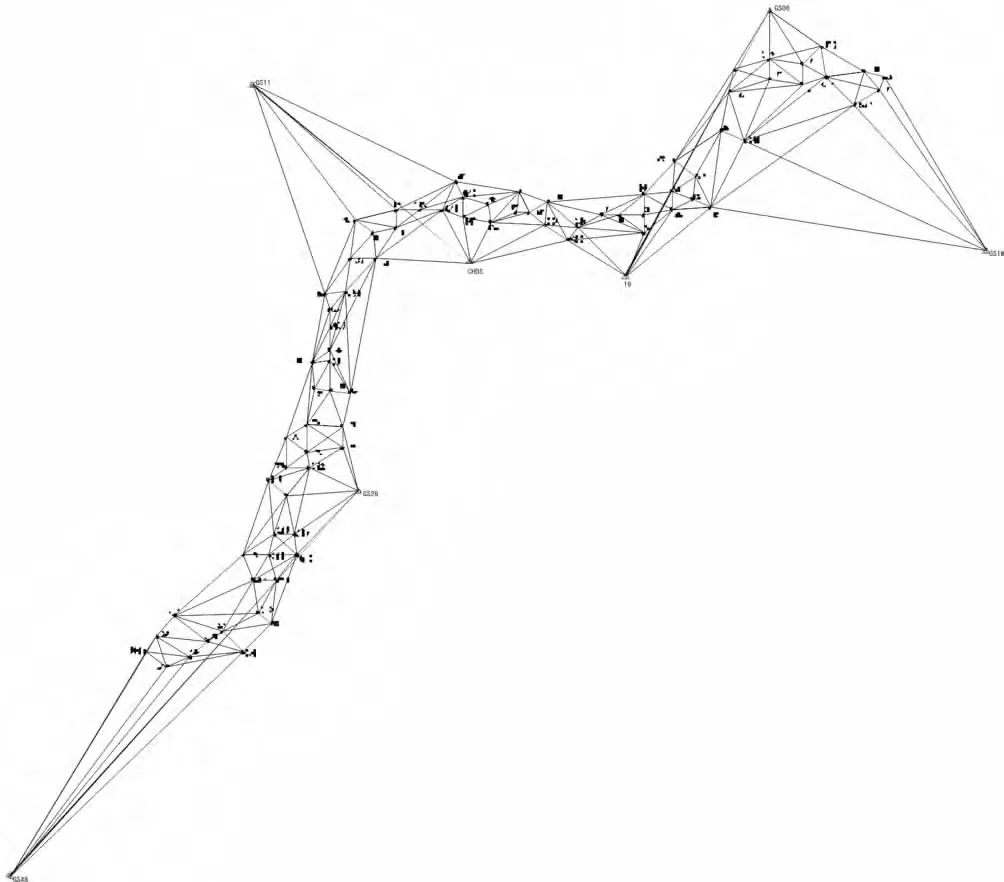
图1 3 号线GPS 控制网示意图
本次外业观测重复设站数为3.2。外业观测满足如下要求:
(1)联测1 号线卫星定位控制点WX4、WX5;联测2 号线卫星定位控制点GPSII31、GPSII66、GPSII88;
(2)测前对GPS 接收机进行常规项目的检验检查,以保证良好的工作状态;外业开机前检查设备的各种连接是否正确。观测过程中,作业人员不离开GPS接收机,不使用手机、对讲机等对信号有干扰影响的电子通讯设备;
(3)精确地进行天线对中整平,对中误差不大于2 mm;每时段观测前、后量取天线高各一次,两次互差小于3 mm,取两次平均值作为最终成果;
(4)相邻通视的点位之间采用直接基线边连接;
(5)每一同步环观测2 个时段,不同时段改变仪器高度,以获得重复基线,前后时段仪器严格对中整平,尽量避免因多次安置仪器对重复基线较差带来的影响。
5 GPS 控制网的数据处理
5.1 基线解算
基线向量解算是利用2 个或多个测站的GPS 同步载波相位观测值确定测站之间坐标差的过程。本项目采用Trimble 随机软件TBC 按静态相对定位模式解算,基线解算采用卫星广播星历坐标作为基线解的起算数据。解算前对数据进行预处理,对观测质量不好的数据进行剔除,解算后对不理想的解算成果进行干预,或改变卫星高度角,或对观测值残差比较大的时段进行删除、或选取不同的参考卫星等进行重新解算。数据处理将框架网与控制网一并处理。
(1)本网全部由独立基线组网,选择其中的272条参与平差计算。由参与平差的独立基线组成的3 边异步环共164 个。Wx的最大值为31.20 mm(限差42.83 mm),Wy的最大值(最大值为框架网环)为42.30 mm(限差74.58 mm),Wz的最大值(最大值为框架网环)为33.10 mm(限差74.58 mm),异步环全长闭合差最大值为53.84 mm(限差129.18 mm),对应的闭合环为框架网环16-GS06-CHDS。异步环全长闭合差分布情况如4 表所示:

异步环统计表 表4
(2)全网中参与平差的重复基线共16 条,最大基线较差为6.7 mm(限差为29.2 mm),基线较差分布情况如表5 所示:

重复基线统计表 表5
5.2 三维无约束平差
GPS 网平差计算采用武汉大学研制的COSA_GPS软件。
以点CHDS 的现有WGS-84 坐标系的三维坐标作为起算数据,在WGS-84 坐标系中进行三维无约束平差。通过三维无约束平差得到:验后单位权中误差为±0.72 cm,最弱点的点位误差为 ±1.17 cm,最弱边边长相对中误差为1/135 000。通过三维无约束平差得到三维基线向量改正数:V△X最大为2.44 cm,对应边为CHDS-GS26,限差为5.94 cm;V△Y最大为3.62 cm,对应边为GS48-GS26,限差为11.44 cm;V△Z最大为2.81 cm,对应边为GS06-GS16,限差为7.17 cm。
5.3 二维约束平差
二维约束平差采用兼容性较好的GS06、GS16、16、GS26、GS48 五个点作为起算点。CHDS、GS11 两点作为检核点。通过二维约束平差得到:验后单位权中误差为 ±0.78 cm,平差后最弱点的点位中误差为±0.89 cm。最弱边边长相对误差为1/113 000,对应边长为560.620 m,相邻点的相对点位中误差为±0.63 cm,满足规范要求。
5.4 成果比较
(1)重合1 号线卫星定位控制点WX4(3 号线GPSIII55)、WX5(3 号线GPSIII54)两个点,重合2 号线卫星定位控制点GPSII31(3 号线GPSIII34)、GPSII66(3号线GPSIII32)、GPSII88(3 号线GPSIII33)3 个点,本次成果与1、2 号线成果较差如表6 所示:

与1 号线重合点较差统计表 表6
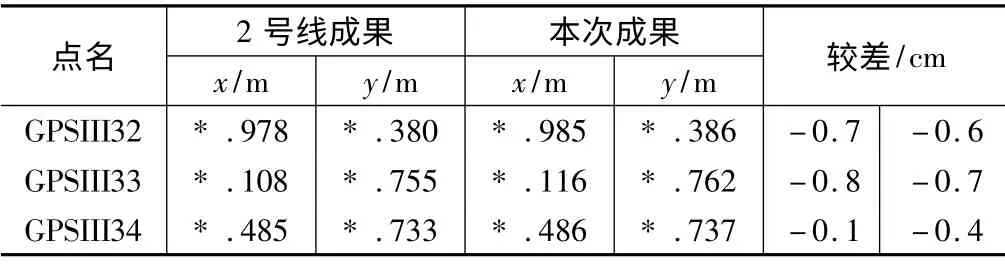
与2 号线重合点较差统计表 表7
满足规范(不同线路控制网重合点坐标较差不大于25 mm)要求。
(2)CHDS、GS11 两个城市控制点作为重合点使用,本次平差成果与原有成果较差如表8 所示:
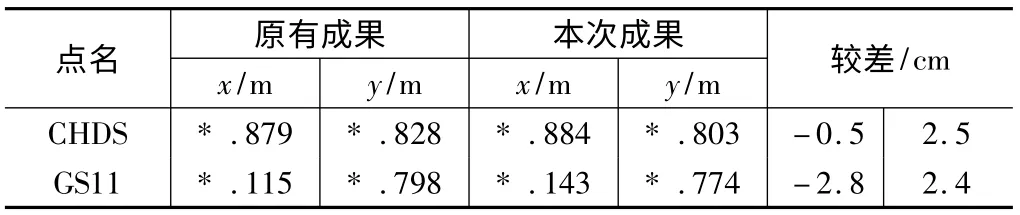
与现有城市控制点坐标比较表 表8
满足规范(与现有城市控制点的坐标较差不大于50 mm)要求。
6 结 语
合肥市轨道交通3 号线GPS 控制网,点位选择合理,观测成果可靠,精度满足设计要求,能较好地满足下一级四等精密导线网的观测。通过本次控制网的施测,有如下几点体会:
(1)轨道交通工程GPS 控制网的精度要求较高(尤其是相对精度),而通视的边长相对较短,精度实现的压力较大。因此,在选点时要避免出现超短边。
(2)选择合理的起算点至关重要,起始数据对控制网成果精度有非常大的影响,约束平差时兼容性不好的起算点会引起GPS 网变形,严重损害整网的精度。
[1]GB50308-2008.城市轨道交通工程测量规范[S].
[2]陈荣林.南昌城市轨道交通工程GPS 控制网的建立方法[J].江西测绘,2010(4):228~239.
[3]黄北新、付先国等.合肥轨道交通1 号线GPS 控制网建立[J].城市勘测,2010(4):97~99.
[4]史秀保,袁峥.宁波轨道交通1 号线一期工程GPS 控制网建立及精度分析[J].城市勘测,2009(4):82~84.
[5]王晓芳,唐青松.成都地铁三号线控制网的布设[J].城市勘测,2014(3):103~106.
[6]吴浩,杨剑,黎华.GPS 原理及工程安全监测应用[M].武汉:武汉理工大学出版社,2014.
