辅助定向法空中三角测量区域网布控方案分析
2014-06-27邹学忠
黄 健,邹学忠
(江苏省测绘工程院,江苏南京 210013)
辅助定向法空中三角测量区域网布控方案分析
黄 健,邹学忠
(江苏省测绘工程院,江苏南京 210013)
设置了辅助定向法空中三角测量区域网划分和地面控制点布设的不同方案,通过试验验证并比较其精度,试图找出一种合理的、适用于实际生产作业的辅助定向法空中三角测量区域网布控方案。本文贴近作业生产,切合实际,对于测绘生产具有较好的参考作用。
POS;ISO;航空摄影测量;空中三角测量;区域网
一、引 言
辅助定向法[1](integrated sensor orientation,ISO)是机载POS辅助航空摄影测量技术的一种空中三角测量方法,又称为集成传感器定向法,是采用IMU/GPS辅助航空摄影技术,得到每张像片的外方位元素,与地面控制点共同参与空中三角测量,再进行定向测图的航空摄影测量方法。
当GPS、IMU与航摄仪三者之间的空间关系未知或不精确时,需要有适量的地面控制点参与,通过将DGPS/IMU系统获取的三维空间坐标和空间姿态数据作为空中三角测量的附加观察值参与区域网平差,从而高精度获取每张像片的外方位元素[2]。
辅助定向法实际上是在现阶段利用POS数据进行直接定向无法达到项目生产精度要求时的一种折中方案。采用布设一定数量的地面控制点,通过空中三角测量的方法,实现更加精确的定姿定向。它相比于直接定向法[1](direct georeferencing,DG),实现了更加精确的定向结果。它相比于常规光束法空中三角测量,由于有POS数据的附加观测值的参与,能够大大减少所需要的地面控制点的数目。由于既有POS数据的约束,又有地面控制点的约束,辅助定向法具有比直接定向法和常规光束法空中三角测量更好的容错能力和粗差剔除能力。
常规航空摄影测量中,控制测量是一个耗时耗力,又必不可少的环节。一个区域网需要布设大量的地面控制点才能满足相关精度要求。而根据POS辅助航空摄影测量辅助定向法空中三角测量的相关理论,仅需少量地面控制点布设即可满足空中三角测量的精度要求。但是,少量究竟可以少到一个怎样的程度,目前相关文献还没有定论。本文试图通过结合与实际生产相关的一系列试验,给出一个符合江苏省基础测绘生产实际情况的较合理的POS辅助航空摄影测量辅助定向法空中三角测量控制点布设方案。
二、试验概况
本文中相关的一系列试验为江苏省测绘地理信息局科研基金项目《机载POS技术在省级基础测绘数据更新中的应用研究》课题项目的一部分。该科研项目结合省级基础测绘生产,试图为江苏省“十二五”省级基础测绘1∶10 000数据更新项目的生产探索出一条可行的技术路径。
根据区域网布点原则,有“……采用数字摄影资料时,区域的航线数不宜超过12条,基线数不宜超过32条,……控制点跨度应符合:航向≤8条基线,旁向≤6条航线……”[3]的规定。在实际作业中,如按此最低要求进行区域网布设,高程精度往往不能满足作业精度要求。因此,实际生产中通常是采用“丘陵地区以不大于4条航线,航向相邻控制点间的跨度不大于6条基线布设像控点,32条基线为一个区域网。……区域网划分的航线仍为4条航线,但航向跨度不得大于8条基线”的方式进行区域网划分,并在其中加密布设高程控制点。因此在实际生产中,一个常规光束法空三加密区域网的大小通常为4条航线,不超过200张像片的区域范围需要布设约30个左右的地面控制点。
为比较辅助定向法的布控优势,试验设置了3块不同大小的区域网及5套控制方案:
1)第1块区域网设置为包含5条航线,共计200张航片的区域网,选用5个平高地面控制点作为基本定向点进行控制,选用4个平高地面控制点作为检查点,记为常规区域网方案(S方案)。其区域划分和布控如图1所示。
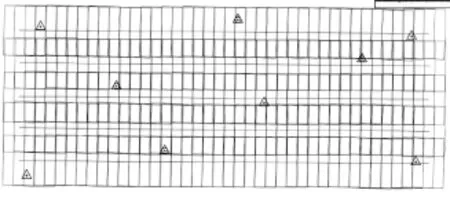
图1 常规区域网布设略图
2)第2块区域网设置为包含13条航线,共计633张像片的区域网,分别选用1个、4个和9个平高地面控制点作为基本定向点进行控制,若干个平高地面控制点作为检查点,记为较大型区域网单点控制方案(M1方案)、较大型区域网4点控制方案(M4方案)和较大型区域网9点控制方案(M9方案)。其区域划分和布控如图2所示。
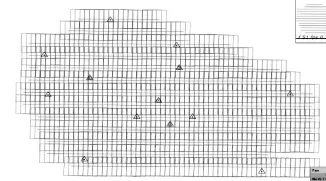
图2 较大型区域网布设略图
3)第3块区域网设置为包含11条航线,共计1045张像片的区域网,选用8个平高地面控制点作为基本定向点进行控制,选用6个平高地面控制点作为检查点,记为大型区域网方案(L方案)。其区域划分和布控如图3所示。
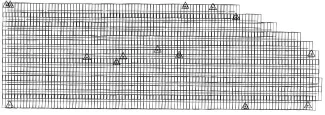
图3 大型区域网布设略图
在一系列ISO法POS辅助空中三角测量前,机载POS系统采用一个单架次,包含4条航线,共计92张像片的区域网,使用36个地面平高点进行基本定向的区域网实施空三加密进行过系统检校和改正。
三、空中三角测量
试验中,该5套方案区域网的空中三角测量均采用在INPHO摄影测量系统中的MATCH-AT功能组件下施测。通过空中三角测量加密解算,加密解算成果精度指标如下。
1.S方案ISO法空三加密指标
(1)基本定向点精度指标
空三加密后,X方向基本定向点残差最大为0.304 m,Y方向基本定向点残差最大为0.343 m,符合限差(平地3 m)要求。Z方向基本定向点残差最大为0.071 m,符合限差(平地0.22 m)要求[4]。
(2)检查点精度指标
X方向检查点的不符值最大为0.289 m,Y方向检查点的不符值最大为0.212 m,符合限差(平地3.5 m)要求。Z方向检查点的不符值最大为0.202 m,符合限差(平地0.3 m)要求[4]。
(3)连接点精度指标
X方向连接点对最近野外控制点中误差为0.072 m,Y方向连接点对最近野外控制点中误差为0.077 m,符合平面位置中误差(平地3.5 m)要求。Z方向连接点对最近野外控制点中误差为0.109 m,符合高程中误差(平地0.3 m)要求。连接点上下视差最大残差为 2.7 um,连接点上下视差中误差为0.6 um,符合相对定向精度要求[4]。
2.M1方案ISO法空三加密指标
(1)基本定向点精度指标
由于仅转刺了一个基本定向点,空三加密平差后,平面、高程方向误差均为0,满足限差要求[4]。
(2)检查点精度指标
X方向检查点的不符值最大为0.955 m,Y方向检查点的不符值最大为1.129 m,符合限差(平地3.5 m)要求。Z方向检查点的不符值最大为1.213 m,不符合限差(平地0.3 m)要求[4]。
(3)连接点精度指标
X方向连接点对最近野外控制点中误差为0.161 m,Y方向连接点对最近野外控制点中误差为0.162 m,符合平面位置中误差(平地3.5 m)要求。Z方向连接点对最近野外控制点中误差为0.133 m,符合高程中误差(平地0.3 m)要求。连接点上下视差最大残差为 3.7 um,连接点上下视差中误差为0.7 um,符合相对定向精度要求[4]。
3.M4方案ISO法空三加密指标
(1)基本定向点精度指标
空三加密后,X方向基本定向点残差最大为0.314 m,Y方向基本定向点残差最大为0.278 m,符合限差(平地3 m)要求。Z方向基本定向点残差最大为0.044 m,符合限差(平地0.22 m)要求[4]。
(2)检查点精度指标
X方向检查点的不符值最大为0.791 m,Y方向检查点的不符值最大为0.873 m,符合限差(平地3.5 m)要求。Z方向检查点的不符值最大为0.880 m,不符合限差(平地0.3 m)要求[3]。
(3)连接点精度指标
X方向连接点对最近野外控制点中误差为0.089 m,Y方向连接点对最近野外控制点中误差为0.091 m,符合平面位置中误差(平地3.5 m)要求。Z方向连接点对最近野外控制点中误差为0.093 m,符合高程中误差(平地0.3 m)要求。连接点上下视差最大残差为 3.1 um,连接点上下视差中误差为0.7 um,符合相对定向精度要求[4]。
4.M9方案ISO法空三加密指标
(1)基本定向点精度指标
空三加密后,X方向基本定向点残差最大为0.278 m,Y方向基本定向点残差最大为0.352 m,符合限差(平地3 m)要求。Z方向基本定向点残差最大为0.075 m,符合限差(平地0.22 m)要求[4]。
(2)检查点精度指标
X方向检查点的不符值最大为0.196 m,Y方向检查点的不符值最大为0.249 m,符合限差(平地3.5 m)要求。Z方向检查点的不符值最大为0.299 m,符合限差(平地0.3 m)要求[4]。
(3)连接点精度指标
X方向连接点对最近野外控制点中误差为0.041 m,Y方向连接点对最近野外控制点中误差为0.044 m,符合平面位置中误差(平地3.5 m)要求。Z方向连接点对最近野外控制点中误差为0.079 m,符合高程中误差(平地0.3 m)要求。连接点上下视差最大残差为 3.1 um,连接点上下视差中误差为0.7 um,符合相对定向精度要求[4]。
5.L方案ISO法空三加密指标
(1)基本定向点精度指标
空三加密后,X方向基本定向点残差最大为0.351 m,Y方向基本定向点残差最大为0.516 m,符合限差(平地3 m)要求。Z方向基本定向点残差最大为0.098 m,符合限差(平地0.22 m)要求[4]。
(2)检查点精度指标
X方向检查点的不符值最大为0.282 m,Y方向检查点的不符值最大为0.416 m,符合限差(平地3.5 m)要求。Z方向检查点的不符值最大为0.272 m,符合限差(平地0.3 m)要求[4]。
(3)连接点精度指标
X方向连接点对最近野外控制点中误差为0.065 m,Y方向连接点对最近野外控制点中误差为0.066 m,符合平面位置中误差(平地3.5 m)要求。Z方向连接点对最近野外控制点中误差为0.083 m,符合高程中误差(平地0.3 m)要求。连接点上下视差最大残差为 4.0 um,连接点上下视差中误差为0.7 um,符合相对定向精度要求[4]。
四、精度检测
运用MapMatrix系统对以上5套方案生产的成果数据进行精度检测。在内业立体环境下采用量测已知点位的方式实施精度检测。其检测精度数据如下。
1.S方案精度检测指标
S方案选择测区中43个有效地物点作为精度检测点实施精度检测,其检测精度如图4所示。

图4 S方案精度统计图
根据精度统计数据,平面方向上,X方向最大误差为1.182 m,Y方向最大误差为-0.995 m,符合内业测图平面最大误差(平地7 m)要求。平面中误差:X方向为0.455 m,Y方向为0.384 m,D方向为0.595 m,符合内业测图平面中误差(平地3.5 m)要求。高程方向最大残差为-0.715 m,有1个检测点超过高程注记点最大误差(平地0.7 m)要求,记为粗差点,占总检测点数的2.33%,符合粗差不大于5%的要求。高程方向中误差为0.330 m,符合内业测图高程中误差(平地0.35 m)要求[5]。
2.M1方案精度检测指标
M1方案选择测区中127个有效地物点作为精度检测点实施精度检测,其检测精度如图5所示。
根据精度统计数据,平面方向上,X方向最大误差为-1.159 m,Y方向最大误差为-2.351 m,符合内业测图平面最大误差(平地7 m)要求。平面中误差:X方向为0.348 m,Y方向为0.635 m,D方向为0.724 m,符合内业测图平面中误差(平地3.5 m)要求。高程方向最大残差为-1.384 m,共计9个检测点超过高程注记点最大误差(平地0.7 m)要求,记为粗差点,占总检测点数的7.09%,超过粗差点不大于5%的要求,不符合精度统计要求[5]。
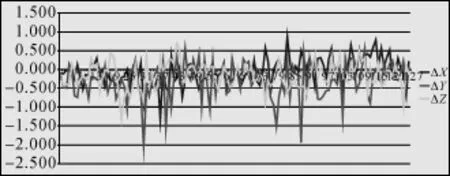
图5 M1方案精度统计图
3.M4方案精度检测指标
M4方案选择测区中127个有效地物点作为精度检测点实施精度检测,其检测精度如图6所示。
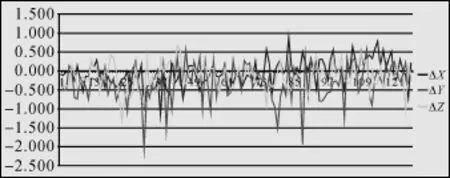
图6 M4方案精度统计图
根据精度统计数据,平面方向上,X方向最大误差为-1.309 m,Y方向最大误差为-2.057 m,符合内业测图平面最大误差(平地7 m)要求。平面中误差:X方向为0.393 m,Y方向为0.479 m,D方向为0.620 m,符合内业测图平面中误差(平地3.5 m)要求。高程方向最大残差为-1.326 m,共计7个检测点超过高程注记点最大误差(平地0.7 m)要求,记为粗差点,占总检测点数的4.72%,符合粗差点不大于5%的要求,高程方向中误差为0.322 m,符合内业测图高程中误差(平地0.35 m)要求[5]。
4.M9方案精度检测指标
M9方案选择测区中254个有效地物点作为精度检测点实施精度检测,其检测精度如图7所示。
根据精度统计数据,平面方向上,X方向最大误差为1.639 m,Y方向最大误差为-2.048 m,符合内业测图平面最大误差(平地7 m)要求。平面中误差:X方向为0.419 m,Y方向为0.520 m,D方向为0.668 m,符合内业测图平面中误差(平地3.5 m)要求。高程方向最大残差为-1.231 m,共计11个检测点超过高程注记点最大误差(平地0.7 m)要求,记为粗差点,占总检测点数的4.33%,符合粗差点不大于5%的要求。高程方向中误差为0.310 m,符合内业测图高程中误差(平地0.35 m)要求[5]。

图7 M9方案精度统计图
5.L方案精度检测指标
L方案选择测区中402个有效地物点作为精度检测点实施精度检测,其检测精度如图8所示。
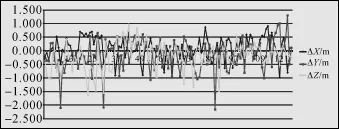
图8 L方案精度统计图
根据精度统计数据,平面方向上,X方向最大误差为-2.152 m,Y方向最大误差为-2.416 m,符合内业测图平面最大误差(平地7 m)要求。平面中误差:X方向为0.420 m,Y方向为0.560 m,D方向为0.699 m,符合内业测图平面中误差(平地3.5 m)要求。高程方向最大残差为-0.761 m,有1个检测点超过高程注记点最大误差(平地0.7 m)要求,记为粗差点,占总检测点数的0.25%,符合粗差点不大于5%的要求。高程方向中误差为0.254 m,符合内业测图高程中误差(平地0.35 m)要求[5]。
五、数据分析
通过以上精度指标统计可以看出:当区域网范围与常规空三加密区域网范围相近时,采用ISO法实施空中三角测量,仅需5个地面控制点即可实现常规空三加密需30个左右地面控制点才能达到的精度水平。考虑到ISO法若进行POS系统检校还需32个地面控制点,看似其方法并不经济。但是,整个测区应包括若干个区域网,而在较短周期完成航摄的前提下,仅需1~2次系统检校。因此,宏观上看,ISO法比常规空三需要更少的地面控制,且测区越大,其能效比越高。
划分的区域网,范围从200张像片,增加到633张像片,再增加到1045张像片,地面布设的控制点为5个、9个、8个。采用ISO法实施空三加密,无论是加密精度指标还是检测精度指标均符合内业相关规范要求。同时,从精度统计数据可以看出,随着区域网范围的扩大,其精度指标有逐步收敛的趋势。这是因为随着区域网范围的扩大,其所包含的像片数增加,随之作为附加观测值参与区域网平差的像片的POS数据也增多,其约束条件增多,区域网的控制强度增强,区域网整体平差精度提高了。因此,采用ISO法实施空三加密完全可以划分比常规区域网加密大得多的范围来实施加密,且地面控制密度要求明显降低,外业控制作业工作量明显减少。在条件允许时,区域网应划分得尽量大一些更能体现ISO法POS辅助空中三角测量的优势。由于本次试验受数据及设备条件限制,未划分更大范围的区域网进行精度验证。
对于633张像片的区域,当采用单点实施地面控制时,加密过程中检查指标超限,其精度检测精度也不合要求。其主要是高程方向精度不合要求,这与实施单点控制除POS数据外没有其他条件约束,而POS数据本身高程就没有那么高的精度水平有关。因此,单点地面控制的ISO法空三加密方案不可行。当采用四角点地面布控方式时,加密过程中的检查指标超限,也反映在高程方向,但精度检测时,成果尚能满足内业测图要求。这说明,四角布控方式结构不是很稳定,受数据误差影响较大,采用ISO法空三加密时,网的强度较低,可靠性低。因此,四角点地面控制也不是理想的ISO法空三加密方案。当采用周边加内部均匀较布设9个地面控制点方案实施ISO法空三加密时,加密及精度检测各项指标均符合相关规范的要求。结合当区域网划分有1045张像片时,用8个均匀布设8个地面控制点方案实施ISO法空三加密时,加密及精度检测指标与之相当的事实,说明地面控制在达到8~9个点时,区域网的结构已经稳定,且其布控方式较为合理,其方式满足相关规范精度要求。因此,采用周边布控加中内部检核的控制布设实施ISO法空三加密方案是较为合适的区域网空三加密方式。
六、结束语
机载POS辅助航空摄影测量对于我国测绘行业来说发展时间还不长,相应的技术规范还不能做到面面俱到,其在机载POS辅助航空摄影测量的区域网划分和布设方面还没有一个明确的规定。通过相关的技术试验和探索,本文得出了“运用ISO法POS辅助空中三角测量,采用合适的区域网划分和地面控制,完全可以满足航空摄影测量内业生产要求”,“运用ISO法POS辅助空中三角测量,适当采用更大范围的区域网,更能体现该技术的能效优势”等的结论。
通过对机载POS技术的更深层次的研究和应用,势必可以挖掘出该技术更多的优势和应用方案,而其技术工艺流程也将更加成熟,并将在我国基础测绘生产乃至其扩展领域发挥更大的作用。
[1] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T 27919—2011 IMU/ GPS辅助航空摄影技术规范[S].北京:中国标准出版社,2012.
[2] 王树根.摄影测量原理与应用[M].武汉:武汉大学出版社,2009.
[3] 中华人民共和国住房和城乡建设部.CJJ/T 8—2011城市测量规范[S].北京:中国建筑工业出版社,2012.
[4] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T 23236—2009数字航空摄影测量空中三角测量规范[S].北京:中国标准出版社,2009.
[5] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T 13990—2012 1∶5000 1∶10 000地形图航空摄影测量内业规范[S].北京:中国标准出版社,2012.
Analysis of Auxiliary Directional Aerial Triangulation Regional Network Control Plan
HUANG Jian,ZOU Xuezhong
P231
B
0494-0911(2014)07-0070-05
2013-03-21
2011年度江苏省测绘科研项目(JSCHKY201116)
黄 健(1975—),男,江苏启东人,高级工程师,研究方向为摄影测量与遥感、数字城市建设与应用等。
黄健,邹学忠.辅助定向法空中三角测量区域网布控方案分析[J].测绘通报,2014(7):70-74.
10.13474/j.cnki.11-2246.2014.0229
