采用电控液压制动系统的SUV防侧翻鲁棒控制
2014-06-27金智林马翠贞张甲乐乔建龙
金智林,马翠贞,张甲乐,乔建龙
(1.南京航空航天大学车辆工程系,南京 210016;
2.南京汽车集团有限公司汽车工程研究院,南京 210010)
采用电控液压制动系统的SUV防侧翻鲁棒控制
金智林1,马翠贞1,张甲乐1,乔建龙2
(1.南京航空航天大学车辆工程系,南京 210016;
2.南京汽车集团有限公司汽车工程研究院,南京 210010)
为改善运动型多功能汽车(SUV)主动防侧翻能力,提出基于电控液压制动系统的鲁棒防侧翻控制方法。考虑汽车的纵向、侧向、横摆、侧倾以及4个车轮的运动,建立8自由度非线性汽车模型;以线性3自由度侧翻系统为参考模型设计鲁棒控制器,以横向载荷转移率作为侧翻评价指标,应用差动制动原理分配横摆力矩控制多自由度车辆;用AMESim软件建立电控液压制动系统模型,用于控制各轮制动力矩;选取J-Turn及Worst-Case典型侧翻工况进行数值仿真,分析防侧翻控制方法对不同行驶工况的适用性。结果表明:EHB系统能够满足防侧翻制动要求;该方法能有效减小横向载荷转移率,降低SUV侧翻危险。
SUV防侧翻;鲁棒控制;电控液压制动;汽车主动安全
运动型多功能汽车(SUV)因具有轿车的舒适性和越野车的动力性、通过性而倍受欢迎。然而,由于其行驶速度的提高及紧急操纵引起的侧翻事故往往成为用户购车时的主要顾虑。美国国家公路交通安全管理局(NHTSA)统计数据表明:SUV在抗侧翻安全星级评定试验下,平均侧翻概率达28%以上,因此汽车防侧翻控制的研究越来越受到人们的重视。
在防侧翻控制研究中,Chen等[1]提出基于侧翻预警的差动制动方法用于提高汽车抗侧翻能力。JIN等[2]进行了汽车侧翻动态稳定性分析,并基于侧翻动态稳定性改进汽车侧翻预警算法[3]。Yoon等[4]研究了底盘一体化控制的汽车防侧翻及改善稳定性的策略。玄圣夷等[5]利用鲁棒控制方法的强适应性设计了多级鲁棒PID控制算法来解决汽车稳定控制问题[6]。Chiu等[7]研究汽车差动制动防侧翻的鲁棒控制。随着制动系统的发展,可控性好、响应速度快、高效、节能的线控制动系统成为改善汽车主动安全性能的重要研究方向[8]。作为线控制动的一种,电控液压制动(electro hydraulic brake,EHB)系统取消了真空助力器,其结构简单紧凑,可单独控制每个车轮的制动力,对汽车防侧翻控制有很强的实用性[9]。
本文以SUV为研究对象,融合差动制动原理,提出了主动防侧翻鲁棒控制方法。以线性3自由度侧翻模型为参考设计H∞鲁棒控制器,进而控制整车8自由度非线性模型,结合EHB系统控制车轮制动压力,并与传统PID控制相比,分析了该控制方法的有效性和鲁棒性。
1 SUV侧翻模型
1.1 整车动力学模型
考虑SUV纵向车速变化以及车轮运动的影响,建立如图1所示的8自由度整车模型。该模型包括汽车的纵向运动、侧向运动、横摆运动、侧倾运动以及4个车轮的转动。研究中忽略侧向风、非簧载质量侧倾的影响,将汽车悬架等效为抗侧倾弹簧和阻尼。

图1 8自由度整车侧翻模型

其中:m为汽车质量;ms为汽车簧载质量;u、v分别为车辆坐标系中沿x、y方向的速度;ωr为横摆角速度;φ为侧倾角;a、b分别为质心到前、后轴的距离;L为轴距;Iz为横摆转动惯量;Ix为绕侧倾中心转动惯量;δ为前轮转角;h、H分别为汽车侧倾臂长和重心高度;kφ为悬架等效侧倾刚度; cφ为悬架等效侧倾阻尼;T为轮距宽度;Fbi、Fci(i=1…4)为各轮胎的纵向力和侧偏力;Tbi(i=1…4)为各轮制动力矩;Ji(i=1…4)为各轮胎转动惯量;(i=1…4)为各轮角加速度;r为车轮半径。

1.2 轮胎模型
本文轮胎纵向力应用Burckhardtμ-S三参数模型[10]。

其中:μ为路面附着系数;S为车轮滑移率;Ci(i=1…3)随路面的变化而变化,可以根据试验测试数据拟合得到。

Fbi=μ·Fzi(10)其中Fzi为各车轮的垂直载荷。考虑制动、转向过程中载荷转移的影响,垂直载荷算法如下:其中ax、ay为汽车的纵向、侧向加速度。侧偏力考虑侧倾转向、侧倾外倾对轮胎侧向特性的影响,得到各轮的侧偏角及侧偏力如下:


其中:αi(i=1…4)为各轮侧偏角;cf,cr分别为前后轮等效侧倾系数;kf,kr分别为前后轮侧偏刚度。
1.3 EHB系统模型
利用AMESim软件建立了EHB系统。该系统的1/4模型如图2所示,包括高压蓄能器、液压泵、进出液电磁阀、制动轮缸、压力传感器、PID控制器等。

图2 1/4 EHB模型
2 防侧翻控制策略
如图3所示,由线性3自由度模型设计鲁棒控制器,进而控制8自由度车辆模型,将所得附加横摆力矩转换为车轮制动压力,通过EHB系统控制车轮纵向力。

图3 防侧翻控制框图
2.1 防侧翻控制指标
横向载荷转移率(LTR)因其侧翻门槛值固定且适合各种车型,成为常用的侧翻指标,定义为
即左、右车轮垂直载荷之差与总垂直载荷之比。LTR的变化范围为[-1,1]。当LTR=0时汽车无侧倾;当LTR=±1时车轮离地,为侧翻门槛值。但由于汽车行驶时左右车轮垂直载荷不易测量,LTR无法直接获得,可根据汽车模型对LTR进行变换得到。

由式(22)可知:外侧车轮垂直载荷达到最大时差动制动措施能提供最大抗横摆力矩,因此

其中μ为路面附着系数。
2.2 参考模型
忽略汽车纵向和俯仰方向的动力学特征,假设汽车左右车轮动力学关于x轴对称,并假设侧倾角很小,横向速度以及横摆角速度相对车速很小,且均可进行线性化处理,得到横向运动、横摆运动及侧倾运动的汽车3自由度侧翻方程。

其中:Ff、Fr分别为前后轮的侧向力;k1、k2分别为前后轮等效侧偏刚度。
2.3 鲁棒控制器设计
由于车辆是强非线性系统,行驶道路复杂多变,存在各种外部干扰,故设计基于混合灵敏度的H∞鲁棒控制器,其控制框图如图4所示。

图4 H∞鲁棒防侧翻控制框图
图4中:rin和e分别为参考输入及横向载荷转移率误差;Gs为线性3自由度车辆系统模型;Kc为H∞控制器。加权函数w1为防侧翻鲁棒性要求的约束,可调节抑制干扰效果;加权函数w2表示差动制动产生附加横摆力矩幅值的约束;加权函数w3为防侧翻控制系统稳定性要求的约束;z1、z2和z3为系统的评价信号。由图4可定义rin至e、ΔM和LTR的传递函数分别为:

其中:G1是灵敏度函数;G3是补灵敏度函数。
基于混合灵敏度思想,为使汽车防侧翻闭环控制系统稳定,真实有理函数控制器Kc需满足

2.4 力矩分配策略
制动轮选择见表1。

表1 制动轮选择表
考虑转向工况时,前后轮施加的制动力矩为

3 典型工况仿真
以某SUV为对象,进行AMESim与Matlab软件的联合仿真分析,参数如表2所示。
选取2种较为恶劣的侧翻工况,如图5所示。
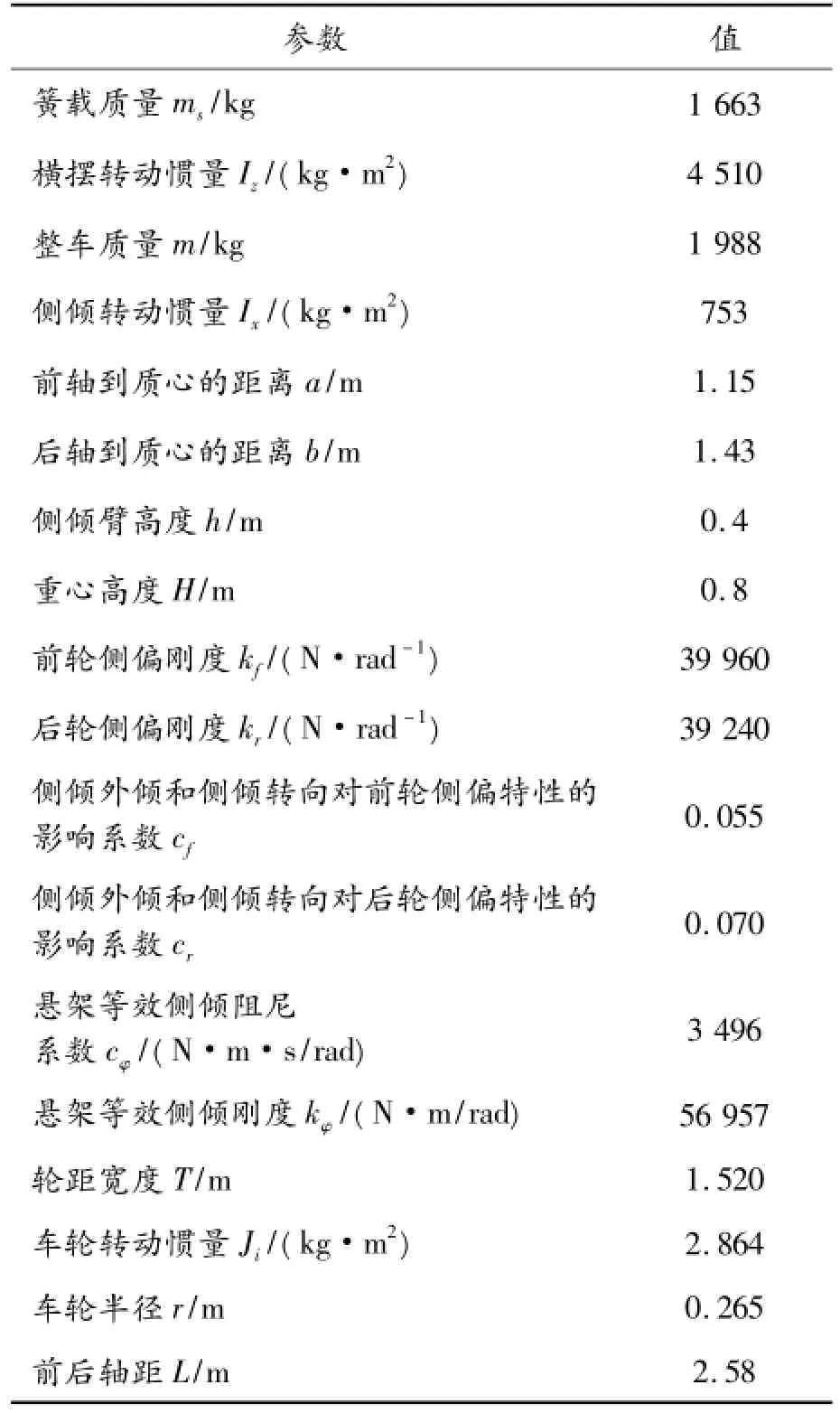
表2 某SUV参数

图5 典型工况前轮转角输入
选取干沥青路面C1=1.280 1,C2=23.99,C3= 0.52(路面附着系数μ约为0.8),设置初始车速为100 km/h,分别应用传统PID控制及鲁棒控制方法进行数值仿真,结果如图6、7所示。可以看出:2种工况下,鲁棒控制方法均能有效防止汽车侧翻。表明该方法对不同工况具有很好的适应性;相对于传统PID控制方法,该方法有效地降低了横向载荷转移率。

图6 J-Turn工况仿真结果

图7 Worst-Case工况仿真结果
图8、9分别为2种工况下有无EHB系统时,横向载荷转移率的变化曲线。可以看出:有EHB系统时,LTR明显减小,特别是Worst-Case工况下;2.5 s后,前轮转角方向突然改变时,LTR减小了约50%,有效地降低了汽车的侧翻危险。
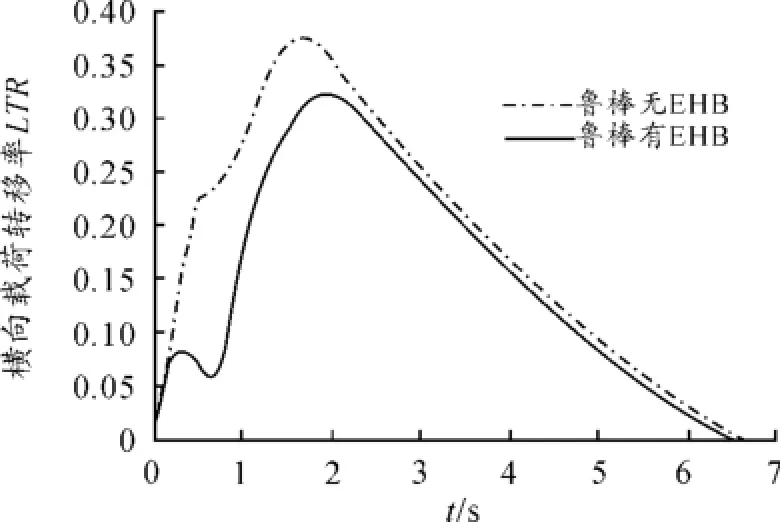
图8 J-Turn工况有无EHB的仿真结果
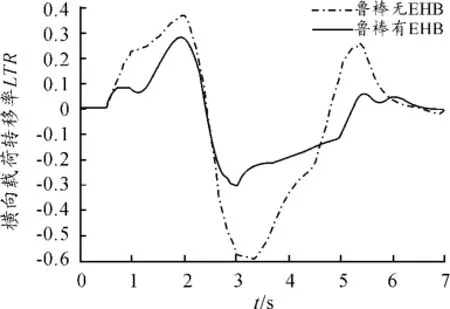
图9 Worst-Case工况有无EHB的仿真结果
图10、11分别为有EHB系统时,制动轮的制动力矩变化曲线。可以看出:随着横向载荷转移率的变化,各轮制动力矩也发生了相应变化,以保证LTR在合理范围内。
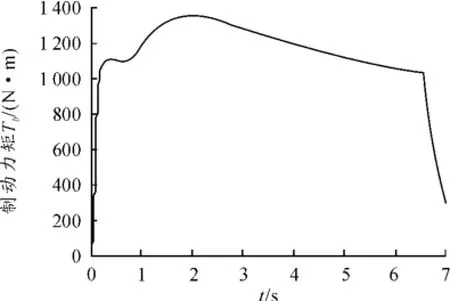
图10 J-Turn工况有EHB的制动力矩曲线

图11 Worst-Case工况有EHB的制动力矩曲线
4 结论
1)建立8自由度SUV模型和EHB模型,提出基于EHB系统的防侧翻鲁棒控制方法。
2)基于线性3自由度汽车模型的鲁棒控制方法对多自由度模型有良好的控制效果,且有EHB的系统能够满足防侧翻控制要求。
3)该鲁棒控制方法在不同行驶工况能实现自适应调节,可有效提高SUV防侧翻能力。
[1]Chen B C,Peng H.Differential-Braking-Based Rollover Prevention for Sport Utility Vehicles with Human-in-theloop Evaluations[J].Vehicle System Dynamics,2001,36 (4/5):359-389.
[2]JIN Z L,WENG JS,HU H Y.Rollover stability of a vehicle during critical drivingmanoeuvres[J].Proceedings of the Institution of Mechanical Engineers Part D:Journal of Automobile Engineering,2007,221(9):1041-1049.
[3]金智林,张鸿生,马翠贞.基于动态稳定性的汽车侧翻预警[J].机械工程学报,2012,48(14):128-133.
[4]Yoon J,ChoW,Kang J,et al.Design and evaluation of a unified chassis control system for rollover prevention and vehicle stability improvement on a virtual test track[J]. Control Engineering Practice,2010,18(6):585-597.
[5]玄圣夷,宋传学,靳立强,等.基于多级鲁棒PID控制的汽车稳定性控制策略[J].吉林大学学报:工学版,2010,40(1):13-18.
[6]欧健,周鑫华,张勇,等.汽车稳定性控制系统模型及横摆控制仿真[J],重庆理工大学学报:自然科学版,2013,27(2):1-5.
[7]Chiu J,CorlessM,Solmaz S,etal.AMethodology for the Design of Robust Rollover Prevention Controllers for Automotive Vehicles Using Differential Braking[J].International Journal of Vehicle Autonomous Systems,2010,8 (2/4):46-170.
[8]CHRIS L,CHRISM,MALCOLM G.Control of an electro-mechanical brake for automotive brake-by-wire systems with an adapted motion control architecture[J]. SAE transactions,2004,113(9):1047-1056.
[9]范钦满,吴永海,徐诚,等.汽车液压制动系设计计算系统的设计[J].机床与液压,2007(12):124-126.
[10]Baffet G,Charara A,Dherbomez G.An Observer of Tire-Road Forcesand Friction for Active Security Vehicle Systems[J].IEEE/ASME Transactions on Mechatronics,2007,12(6):651-661.
(责任编辑 刘舸)
Robust Control Strategy of SUV Rollover Prevention with Electro Hydraulic Brake System
JIN Zhi-lin1,MA Cui-zhen1,ZHANG Jia-le1,QIAO Jian-long2
(1.Department of Vehicle Engineering,Nanjing University of Aeronautics&Astronautics,Nanjing 210016,China;2.Research Institute of Nanjing Automobile Group Co.,Ltd,Nanjing 210010,China)
In order to improve performance of rollover prevention for Sport Utility Vehicle(SUV),the robust control strategy with Electro Hydraulic Brake(EHB)system is presented in this paper.An 8-degrees-of-freedom model was established on the rollover dynamic theory,including longitude,lateral,yaw,roll and fourwheel rotation motion.The Load Transfer Ratio(LTR)was applied to design robust control strategy on the referencemodel.Also,themodel of EHB system was established using AMESim software to produce braking torque.Then,the performance of the control strategy was analyzed by some typical casessimulation,such as J-turn and Worst case.The results show that the EHB system can provide the braking force for the vehicle rollover prevention and the strategy can reduce the load transfer ratio effectively.
rollover prevention for SUV;robust control;electro hydraulic brake;vehicle active safety
U461.91
A
1674-8425(2014)01-0001-06
10.3969/j.issn.1674-8425(z).2014.01.001
2013-06-07
国家自然科学基金资助项目(11202096)
金智林(1978—),男,江西乐平人,博士后,讲师,主要从事车辆动力学研究。
金智林,马翠贞,张甲乐,等.采用电控液压制动系统的SUV防侧翻鲁棒控制[J].重庆理工大学学报:自然科学版,2014(1):1-6.
format:JIN Zhi-lin,MA Cui-zhen,ZHANG Jia-le.Robust Control Strategy of SUV Rollover Prevention with Electro Hydraulic Brake System[J].Journal of Chongqing University of Technology:Natural Science,2014(1):1-6.
