海底冲射式开沟机技术进展
2014-06-27,,
, ,
(上海交通大学 船舶海洋与建筑工程学院,上海 200240)
1 已有冲射式开沟机
1.1 冲射式开沟滑撬
1946年Samy Collins 制造了世界上第一台高压水冲射开沟滑撬,并在墨西哥湾埋设了第一条海底石油管线。从此冲射式开沟滑撬蓬勃发展,得到广泛应用。此种类型的开沟机主要由喷冲系统、抽吸系统、机架组成。最初的冲射式开沟滑撬动力单元全部安装在母船甲板上,包括高压水泵和空气压缩机,滑撬的行走主要靠母船的拖动。其主要工作原理是预先将管道铺设在海底,冲射式滑撬骑跨在管道上,开沟机本身的重量主要通过两侧的滑撬传递到海底,管道不对滑撬提供支撑力。开沟时,母船通过钢缆拖动滑撬沿着管道前进,并通过橡胶软管将高压水输送到滑撬上的喷冲臂上,用高压水射流将海底土质破碎或者液化,然后同样利用橡胶软管将压缩空气输入到抽吸臂中,利用气体上升的浮力带动泥浆,从而将泥浆排出沟外形成沟槽。
随着石油开采进入更深的水域,埋设管线时需要的高压水和压缩空气的输送软管长度越来越长,尤其是输送高压空气需要首先克服海水的压力,效率大大降低[3]。此时工程师们对冲射式滑撬进行了较大的改进,采用潜水泵代替了甲板上的水泵,射流抽吸泵排泥代替气举排泥,而母船仅仅提供电力和拖力,从而形成了目前冲射式滑撬的形式,具体结构见图1。

图1 冲射式滑撬结构示意
冲射式开沟滑撬结构简单容易制造,成本相对低廉,适合在水深小于300 m区域作业,目前在世界上很多国家仍然在使用。
1.2 自推进爬行开沟机
石油管线埋设进入深水区后,冲射式开沟滑撬需要的缆绳越来越长,给施工作业带来很大不便,此时出现自推进爬行开沟机。它自身安装履带,通过液压系统驱动履带推动开沟机前进,目前应用的深水开沟机,大多采用此种形式。此类开沟机构造相对复杂,自身重量也较大,除水面动力与控制系统外,它主要由履带行走系统、喷冲系统、抽吸系统、开沟机底盘、动力单元以及各类传感器组成,通过安装机械式破碎工具,还可以开凿坚硬的海底地层。目前具有代表性的产品主要有以下几种。
总部位于巴黎的Nexans公司生产的Spider系列开沟机发展早,技术成熟,目前已经埋设了超过6 000 km的管线。Spider 系列开沟机是从瑞士丛林机械改造而来,它结构灵巧而具有很高的强度,基于这种底盘,Nexans开发了多种开沟机,包括 Spider terrain dredger system(地形平整系统)和Spider Capjet。见图2。
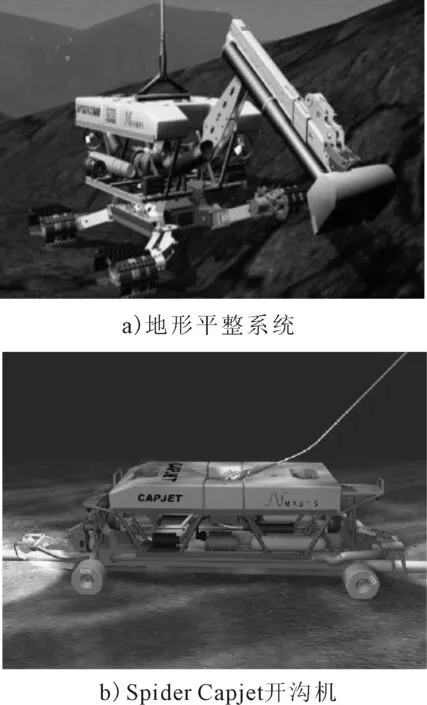
图2 Nexans公司Spider系列开沟机
地形平整系统由操控集装箱、发电机、变压器、装载箱、脐带绞车和Spider本身组成,主要用于水下清障和场地整平。从外形看它类似于一台挖掘机,由底盘和可绕底盘旋转的上部结构组成。底盘装有4个支腿,每个支腿上带有履带,可以单独活动,非常灵巧,这使得机器可以在崎岖不平的海床上工作。上部结构主要由射流铲斗和抽吸系统组成。铲斗边缘上带有整排的喷嘴,挖土时,主要通过射流将土体破碎和液化,铲斗本身受力很小,而抽吸系统的入口正好安装在铲斗内,当土体破碎后即将其抽走排到一边。它装有4套动力单元,2个液压泵站,2个高压水泵。其中驱动螺旋桨的泵站100 kW,驱动铲斗臂和支腿的泵站55 kW,供给铲斗喷嘴的水泵功率420 kW,抽吸泵125 kW。它长5 m、宽4 m、高2.5 m、重11 t,最大开挖深度6 m,可以开挖抗剪强度达300 kPa的土体,最大工作水深2 000 m。它还装有众多的传感器,彩色摄像头6只,声呐2只及压力传感器、深度计、沉积物传感器等。此外它还具有强大的数据传输能力,上行传输能力达27 Gbit,下行传输为Rs232接口5个,Rs485/422接口5个,此外还有3×10 M的以太网。
它的运动是由一个特殊的布放和回收系统(LARS)控制,脐带用来提供电力和控制信号,在刚下水时,操纵者可以通过水下相机监控Spider的动作,当开始工作后水下能见度变低,则通过一个3D软件操纵,传感器被安装在各个传感器关节上,声学传感器网络安装在海底,海底的3D模型不断在人机交互界面上显示。
2004年地形平整系统在挪威Ormen Lange气田投入使用,它在30°的陡坡上工作,最多每天开凿多达100 m3的土体,沟槽的最大深度4 m。
Spider Capjet主要用于埋缆,长8 m、宽4 m、高2.5 m,总重14.5 t,主要靠螺旋桨推动。Capjet 功率强劲,110 kW的液压泵站2台,4.4 kW的液压泵站1台,以驱动10只螺旋桨。喷冲系统配有两台420 kW的水泵,喷射压力1.0~1.6 MPa,它带有前后2个喷冲臂,前喷冲臂主要是2个喷管,为电缆进行预开沟,再由后面的喷冲臂将沟槽开到预定深度。最早它是被用来在浅水区埋设电缆,后来经过不断改进,1999年形成了现在的Capjet开沟机。
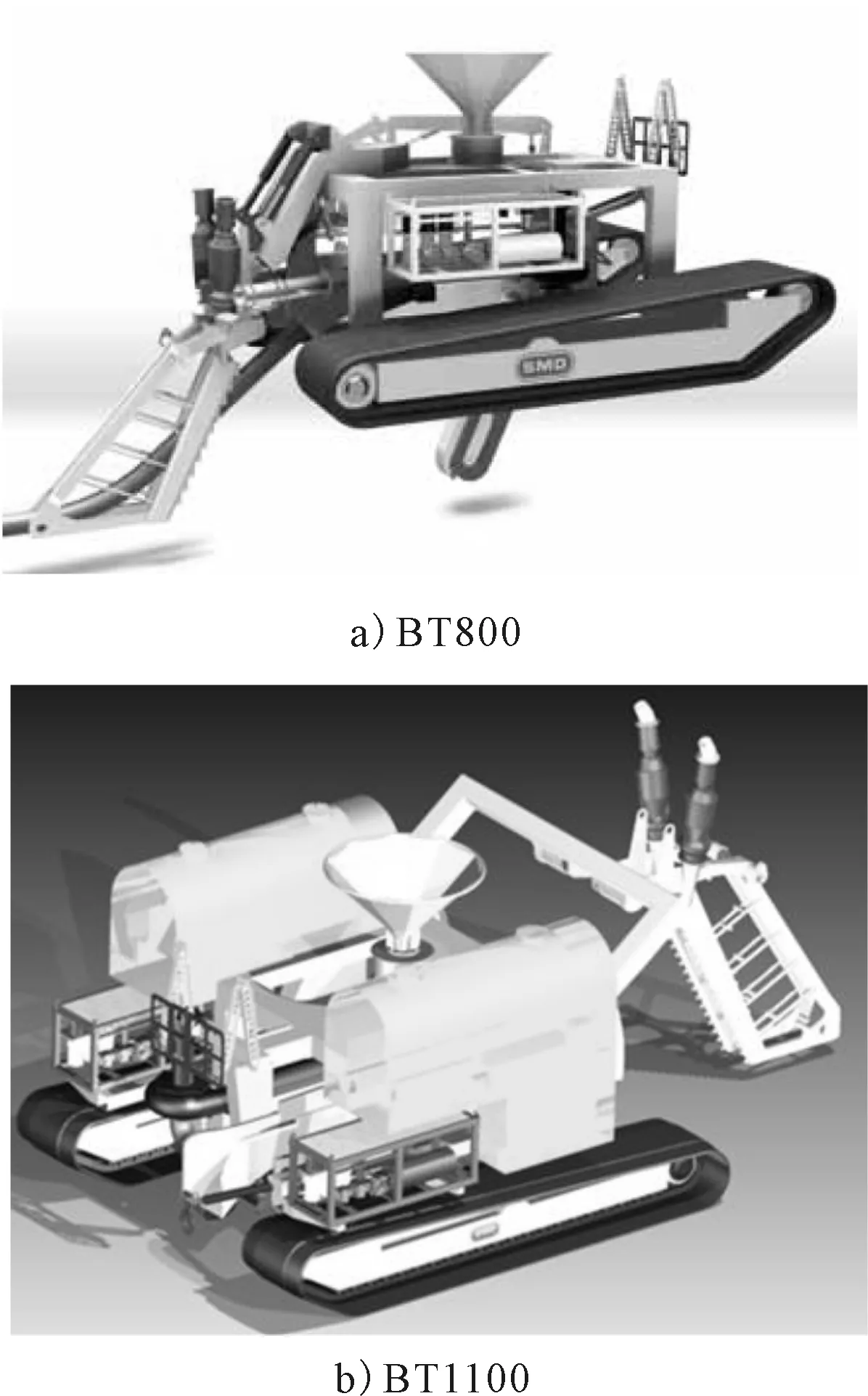
图3 SMD公司海底爬行开沟机
SMD(Soil Machine Dynamics Ltd.)公司位于英国沃尔森德市,在30年中它生产了超过100台的水下开沟机,目前在产的开沟机多达11个型号,主要包括BT系列(见图3)和QT系列开沟机。此外SMD公司还在水下开矿、重型ROV研发方面有着雄厚的实力。它开发的BT系列开沟机是一种海底爬行式开沟机,重量和功率都很大,重量上从30~180 t,功率从588~2 400 kW不等。它通过液压泵站带动履带驱动开沟机前进。它有两种开沟方式,射流开沟和链式齿条开沟,开沟深度能达到2~3 m,在利用链式齿条开沟时,可以切割40~80 MPa的岩石。同时也配备抽吸系统,最大抽吸速度600 m3/h。埋缆直径最大0.3 m,埋管直径1.5 m,工作水深1 000 m。由于开沟机本身重量大,考虑到海底岩土体的承载力,还配备了浮力材料以减小履带的接地比压,使其可以在较软的泥面上行走,最低可以行走于抗剪强度10 kPa的泥面。其结构采用高强度钢,以承受本身巨大的重量。各海底爬行式开沟机参数见表1。
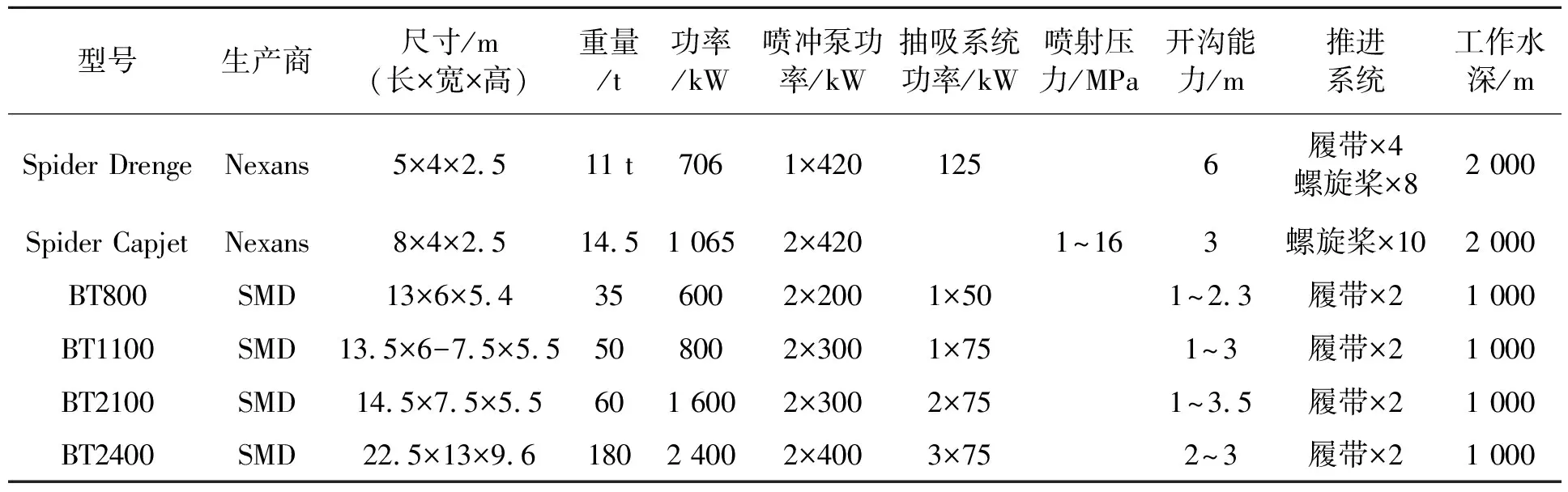
表1 海底爬行式开沟机参数
自推进爬行式开沟机自重和功率都很大,不需要母船的拖动,开沟能力强,能够在坚硬的土质条件下开凿宽大的沟槽,同时受水深限制小,可以在1 000~2 000 m深的水域工作,更适合深海的海底管道埋设。
1.3 开沟型ROV
开沟型ROV(remotely operated vehicle),即开沟型遥控潜水器,顾名思义它是一台具有开沟功能的ROV,它既能像ROV一样在水中自由的运动,又可以完成水底开沟埋设管线的工作。目前的开沟ROV一般同时装备螺旋桨和履带,履带由液压泵站驱动。它一般被设计为有一定的负浮力,以保证在海底开沟时的稳定性。
在生产开沟型ROV中,以1974年成立于英国约克的Perry Slingsby公司最为久负盛名,2007年被Forum Energy Technologies Inc. 收购。迄今为止,已经生产了数以百计的开沟型ROV。Trition 系列开沟机是Perry 公司仍在生产的开沟型ROV,以Triton®XT600为例,它具有自由飞行和循线两种工作模式,由一个73 kW的液压泵站驱动4个水平推进器,3个垂向推进器。除螺旋桨外,它还装备有液压驱动履带2条,可行走于最小3.5 kPa的土层上。它的总功率达到367 kW,最大开沟深度3 m,自由飞行模式时总重11 900 kg,循线模式时11 800 kg。具体结构见图4a)。图4b)展示了另一个型号XT1200。此外它还装有智能化系统和众多的传感器,操作简便。它具有两种作业模式,自动模式和手动模式。在自动作业模式下可以对航向、深度、距离海底距离、电缆跟踪进行自动控制。其中航向控制精度±2°,深度控制精度±150 mm,高度控制精度±150 mm。最大喷射压力1 MPa,流量1 146m m3/h,最大开沟深度3 m。
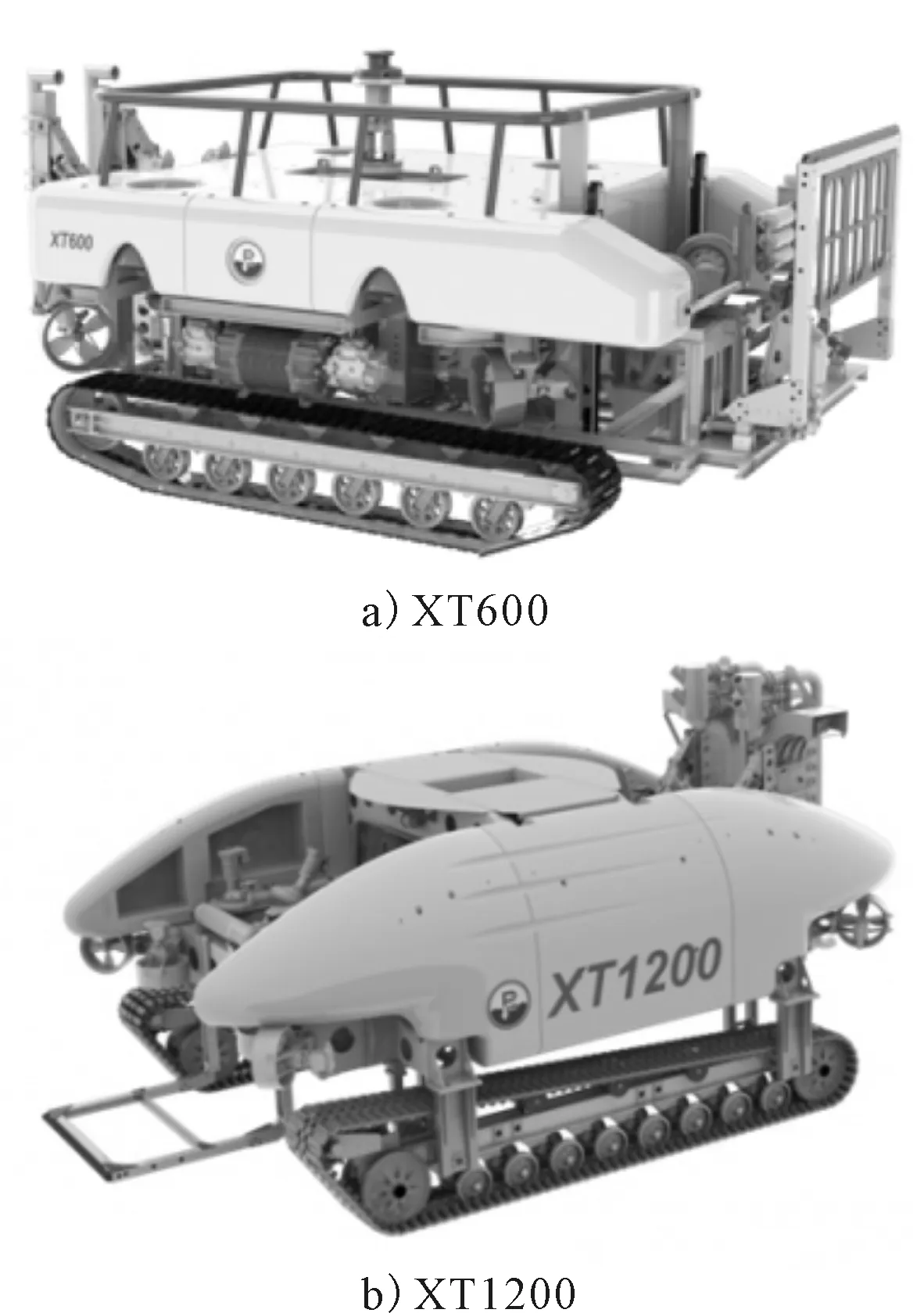
图4 Perry公司开沟型ROV
Trition带有复杂的控制系统以实现ROV的精准控制。包括:基于奔腾 PC的ROV水面控制、基于STD-32的ROV水下控制系统以及数据库驱动软件和实时操作系统。它还带有完善的数据传输系统,包括单模式光纤视频和数据多路复用器、8个实时视频传输通道、4个全双工RS232数据通道(115 kb/s)、4个全双工/半双工 RS485/422/232数据通道(115 kb/s)。
SMD公司也生产多种开沟型ROV,它生产的Q-Trencher 系列开沟型ROV是基于高强度底盘的电缆、管道埋设ROV,能够开挖宽度达3 m的沟槽,其中QT-2800(见图5)是世界上功率最大的开沟型ROV,重达63 t,它主要由机架、喷冲系统、抽吸系统、推进器、管道对中系统以及滑撬组成,在工作时通过推进器推动滑撬在泥面上前进,为保证开沟机工作时的稳定性,在水中有5 000 N的负浮力。它配有375 kW水泵4台,总功率高达2.1 MW,其中1.5 MW的功率用于喷冲系统。共有推进器10台,其中垂向推进器4台,直径750 mm,脐带缆长度1 800 m、直径62.5 mm。此外上面还装有众多的传感器,彩色摄像头两只,单色摄像头6只,声呐1台,多普勒测速计1台,陀螺仪1台。它带有2个可装卸的喷冲臂,开沟宽度可调,最窄0.25 m,最宽1.2 m,开沟深度0~3 m,可以在软粘土和砂土中开沟。
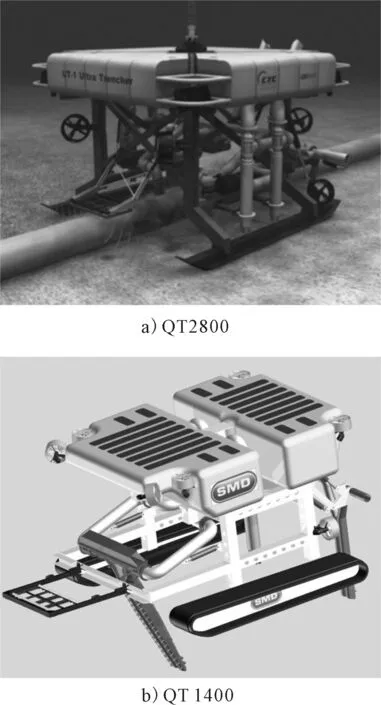
图5 SMD公司开沟型ROV
各开沟型ROV的参数见表2。
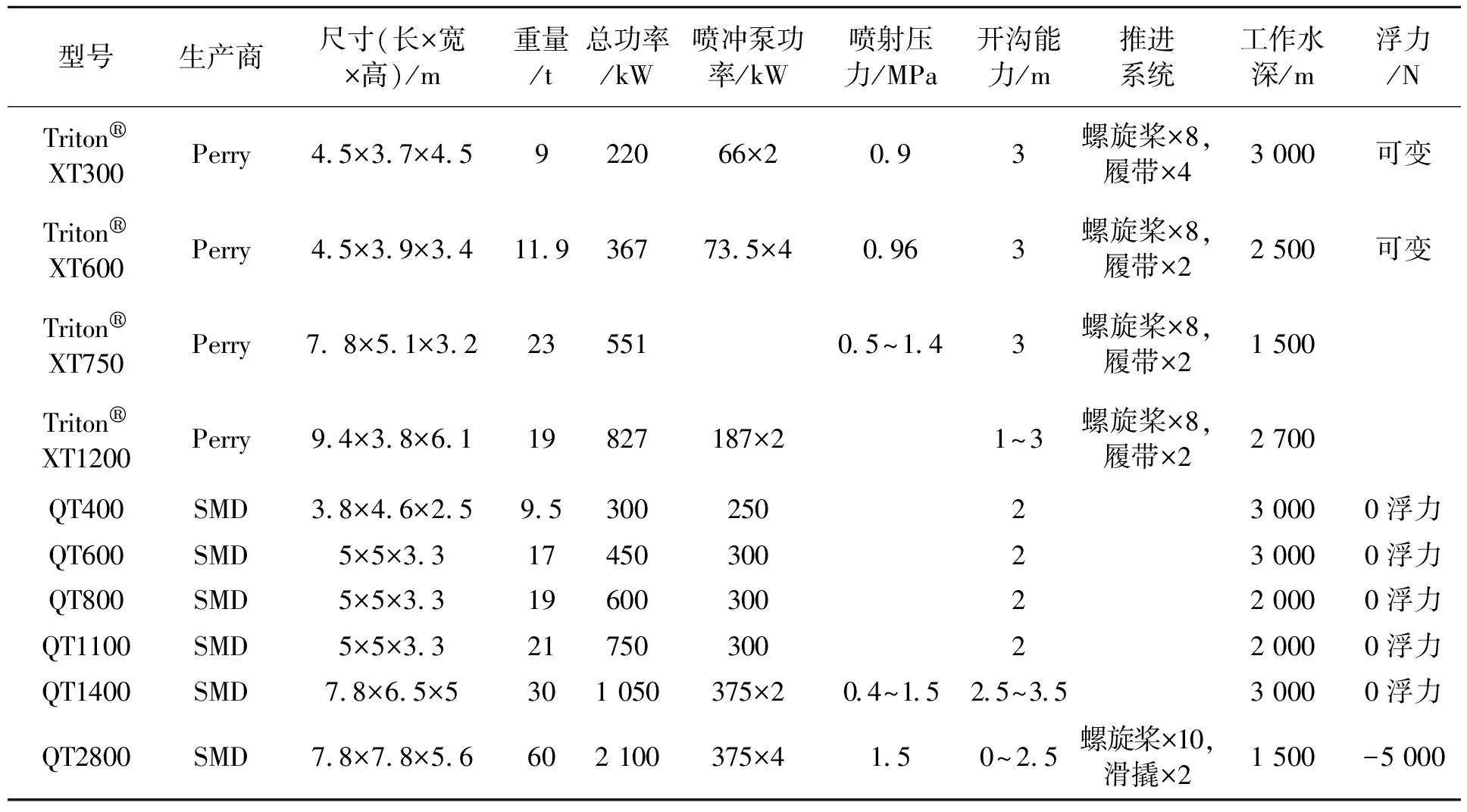
表2 开沟型ROV参数
开沟型ROV在水中的重量轻,接地压强小,最大工作深度大(1 500~3 000 m),自动化程度高,适合在深海区或者海底软粘土地区埋设电缆或者管道。
1.4 非接触式控流开沟机
非接触式控流开沟机是进一步简化的水下射流开沟设备,它在工作中与管道和海底土体均不接触。与以往的开沟设备有明显不同,它主要由螺旋桨和喷管组成,无推进器或者支架,质量大大减小, 这也使得所有的功率消耗都用于开沟,效率得到提高。目前主要有AGR公司和Reotech两家公司生产。
位于英国阿伯丁的AGR公司是世界上少数具有深海开沟作业经验的公司,他们推出两款非接触式控流开沟机,分别是SeaVator和ClayCutter X。SeaVator是用大流量、低压力的射流来冲散海底松散的沉积物,它主要由一个垂直向下的导管螺旋桨组成,见图6a)。工作时SeaVater悬于管线上方,不与海底或者管线以及其他结构物相互接触,通过母船带动前进,适用于抗剪强度为50 kPa及以下的土体,当遇到强度较高的土体时,母船上配有水泵喷射系统与其协同工作,水泵功率高达2 205 kW。从1990年代中期起就被广泛用于开沟和海底场地整平。
ClayCutter X 主要由螺旋桨和重型射流横梁组成,螺旋桨用来产生大流量、低压力的射流,以冲刷海底沉积物,高压射流由母船上的泵组提供,通过软管连接到射流横梁上,见图6b)。其上共有24个喷嘴,喷嘴直径7 mm,分为3组安装在射流横梁上,每组都有阀门控制。ClayCutter X母船上配备的3台泵组,每台的功率2 205 kW,产生的高压射流高达200 MPa, 适用于从软土到极坚硬粘土海底开沟作业,最大可以切割抗剪强度高达500 kPa的粘土[4]。2008年夏季它被用于挪威北部 Ormen Lange的气田管道埋设,此地的粘土抗剪强度高达400 kPa, 水深870 m,在工作中共开凿了3 368 m3的土壤,平均23.8 m3/h。
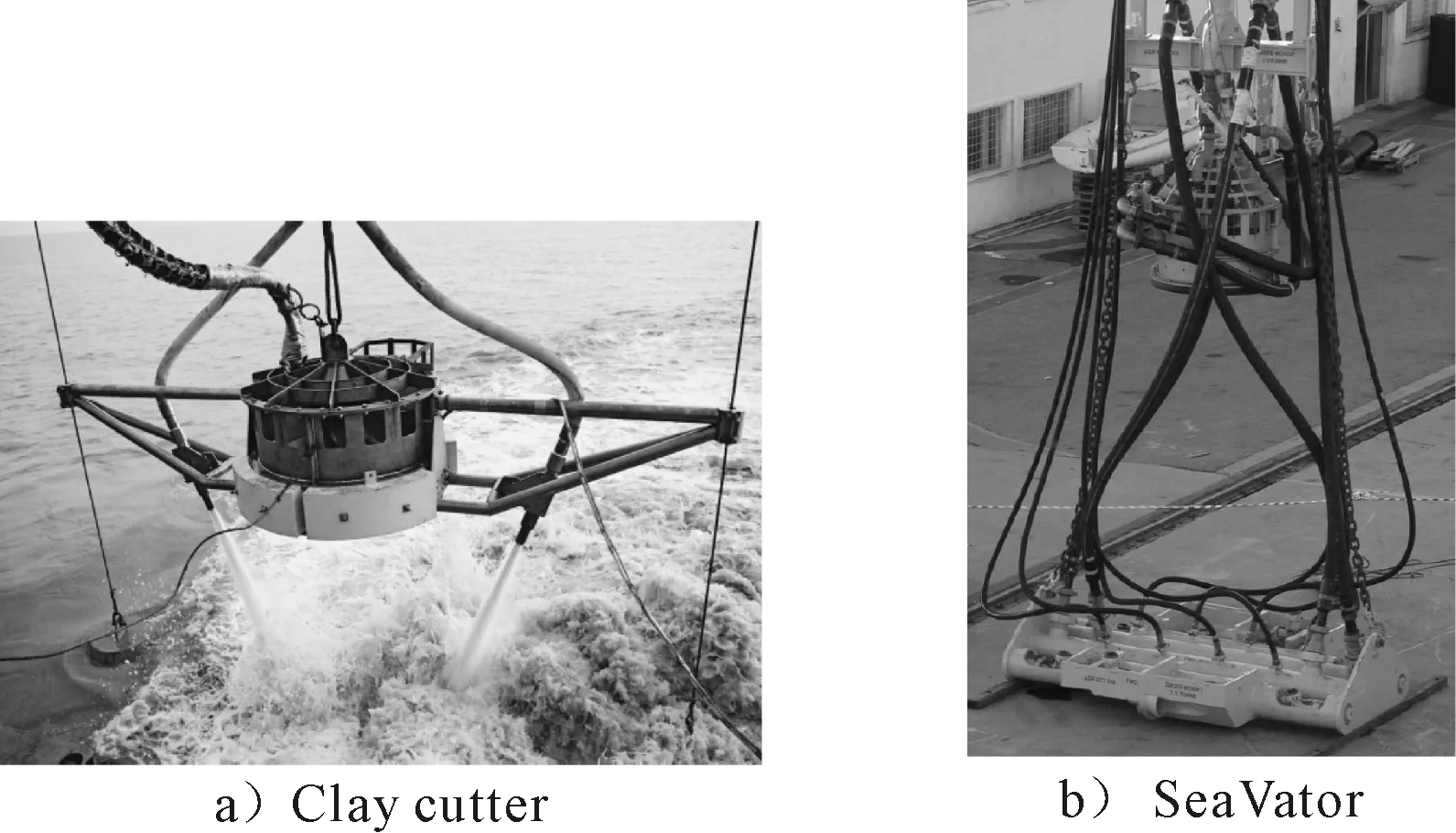
图6 AGR非接触式控流开沟机
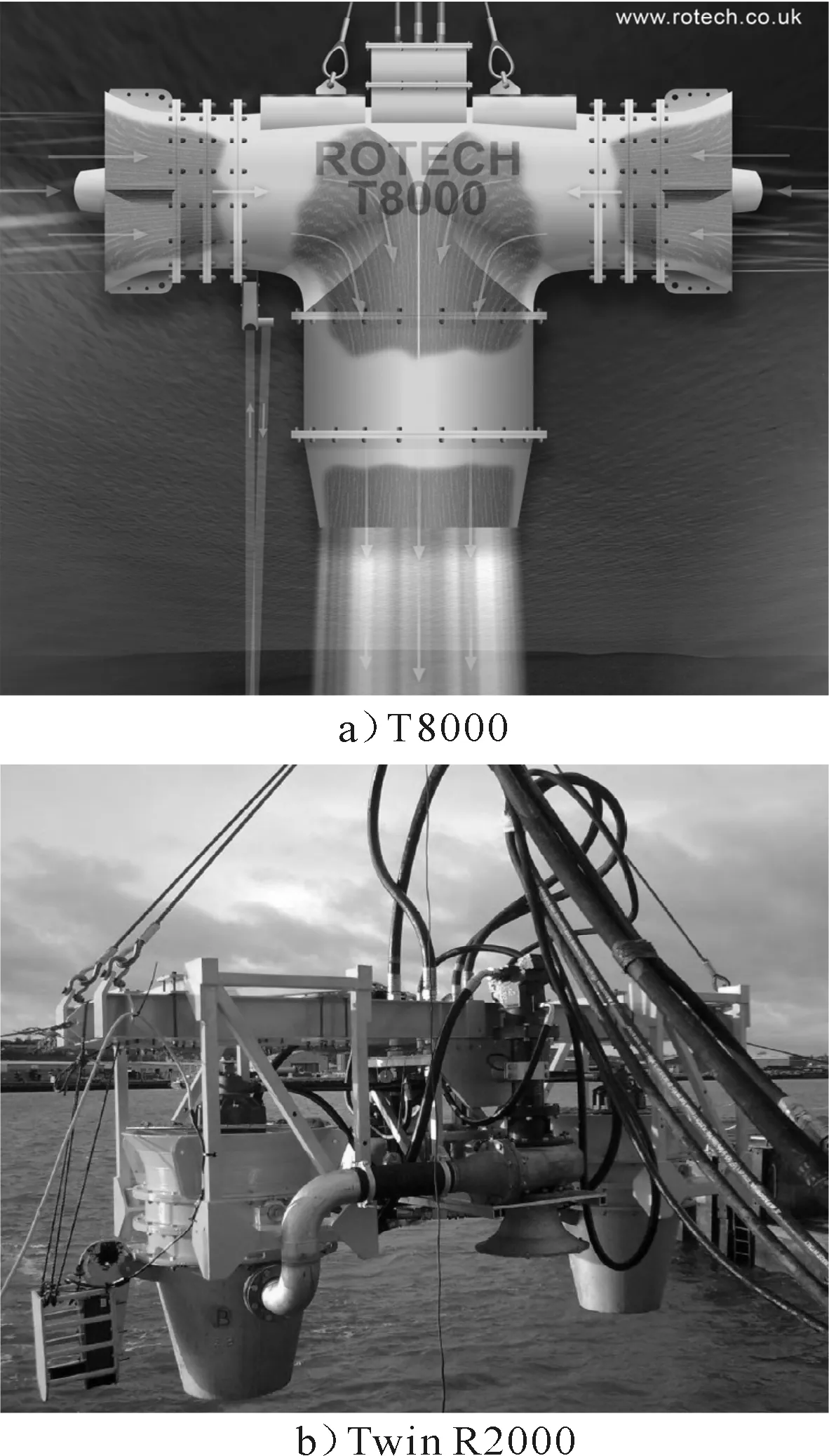
图7 Rotech非接触式控流开沟机
位于英国的Reotech公司在2010年推出了海底冲射式开沟机史上划时代的产品,它由2个螺旋桨和一个汇流管组成,无推进器或者行走机构,结构极其简单,见图7。工作时它悬挂于母船下方,随母船一起前进。与其它类型的开沟机相比,它具有下列特点:大流量,比已有开沟机的流量都大一个数量级,达到每小时10 000 m3的级别;低压力,压力低于所有开沟机的压力,水头只有5 m左右;非接触,喷管与海底土质、海底管线以及其它海底构筑物均不接触,它工作时悬挂于海底管线的上方,由母船带动前进;宽适应性,可用于除基岩外的任何土质,包括淤泥、沙土、砾石、硬粘土等,目前已经发展出多个型号。Retech的开沟机利用电力驱动的液压泵可以使得作业深度达到3 000 m,最小作业水深1.4 m,其上还配备成像声纳,用来观测沟槽的开凿状况。Retech 公司声称在全世界范围内完成了280个工程项目。2011年3月,T4000 在苏格兰东北部海域埋设了1 268 m长的电缆,全程仅用15 h,平均84.5 m/h。2011年2月,在荷兰进行电缆开挖作业,当地海底沉积物为砂土和软土,300 m长的电缆仅仅用1.5 h即完全揭露出来。它们不仅可以用来进行管线埋设,还可以进行海洋平台桩腿安装,通过喷冲将海底土壤开凿到桩腿的持力层,最大开凿深度达到28 m。
目前已经生产使用的非接触式控流开沟机的参数见表3。
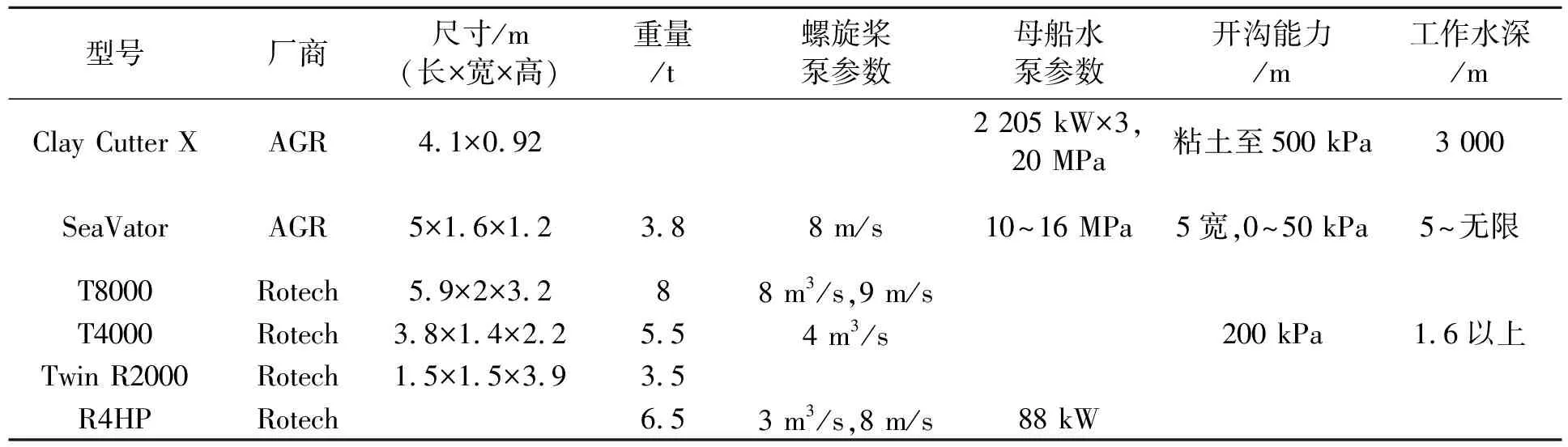
表3 非接触式控流开沟机参数列表
从上述几种类型的产品分析可知,非接触式控流开沟机的特点是自身重量轻、结构简单、适应性强、效率高,但是它本身不具有移动的能力,需要依赖母船的动力定位功能(DP)。目前动力定位母船已经广泛应用,它的应用会得到更进一步的推广。
2 海底冲射式开沟机关键技术
2.1 射流破土技术
冲射式开沟机都是通过射流来破碎土体,然后利用射流泵或者泥浆泵将破碎后的土体抽吸到沟外。因此射流系统与抽吸系统的效率对开沟机的影响很大。从表1和表2可以得出,喷冲系统与抽吸系统所占的功率消耗占到总功率的60%~80%,所以提高喷冲系统和抽吸系统的效率对开沟机极为重要。
影响喷冲臂射流开沟的因素主要包括:喷嘴直径、喷冲压力、土体抗剪强度和开沟机前进速度等;影响破土效率的因素还包括土体的抗拉强度以及塑性指数[5-6]。
射流破土是流体与土体耦合作用的过程,射流对岩土体破坏的主要作用有[7-9]:①冲击作用,即射流连续锤击岩土体产生锤击力,促使岩土体发生破坏;②水楔作用,当射流充满岩土体时,由于射流的反作用力而产生水楔,在垂直射流轴线方向上,射流楔入岩体裂隙的薄弱部位,射流的静压变成动压,使岩土体剥落,裂隙加宽;③挤压作用,在射流的末端,能量衰减很大,不能直接冲击土体颗粒剥落,但能对有效射程的边界土体产生挤压力,对四周土体有压密作用;④空化破坏作用,射流在打击岩土体时压力梯度大的部位将产生空泡,空泡的崩溃将对打击面上的岩土体产生很大的破坏力。在实际的水射流过程中,有可能上述作用中的一种或者几种起主导作用,其它处于次要地位。由此可见,射流破土的机理尚未完全清楚,还需要做大量的研究。
2.2 海底履带推进技术
海底自推进式爬行开沟机大都由履带驱动,由于大部分海底表层都是软质的粘土或者淤泥,抗剪强度很低,多在3~10 kPa。根据车辆动力学,履带能够提供的承载力和推动力都与土体的抗剪强度成正比[10],因此低抗剪强度的粘土一方面承载力很低,会造成履带车辆的沉陷;另一方面,履带在其上行走时推进力很小,有可能使开沟机不能前进。
Neil Morgan[11]等根据工程经验提出,在设计自推进履带开沟机时参考的土体抗剪强度值应该是表面浅层土的抗剪强度,在作业过程中一定要避免海底土壤承载力失效,因为一旦承载力失效会导致开沟机完全不能行走。由于开沟机履带在行走时会破坏土体的强度,使得承载力和推进力都降低,所以建议尽量避免开沟机在相同路线上行走多次。此外还建议,在海底操作履带车辆进行滑动转向时,要进行多次小角度的转向操作,而不是大角度的转向操作,否则会造成履带推进力的降低和开沟机系统不稳定。
3 发展方向
1)智能化。开沟机具有智能的操作方式,可以定深作业,或者定方向作业,可以大大减少人为干预。
2)大型化。开沟机的重量和功率都很大,自身结构强度高,可以在坚硬的土体中开凿沟槽,埋设直径较大的油气管道。
3)宽适应性。宽适应性不仅表现在工作对象的适应,还表现在工作环境的适应。一台开沟机可以完成多种作业,既可以埋设管道也可以埋设电缆,或者即可以在粘土中又可以在砂土中开沟作业,还可以通过更换工作套件变成机械式开沟机。
4)高效率。以非接触式控流开沟机为代表,通过自动定位船舶的定位功能,省去了开沟机的行走机构和抽吸机构,使其结构得到简化,整个开沟机消耗的功率全部用于开沟,开沟效率大大提高。
[1] 李文涛,葛 彤.挖沟机相关技术进展[J].船海工程,2010,39(4):146-149.
[2] 张国光.水下开沟机的监测技术与应用[J].海洋工程,1999,17(1):87-9.
[3] 张国光.海底水力冲射开沟机械及影响作业的效率的因素[J].海洋技术,1989,8(4):48-58.
[4] Det Norske Veritas.Foundations,classification notes No.30.4[M].Hovig,Norway,1992.
[5] Machin J,Messina F,Mangal J,et al.Recent Research on Stiff Clay Jetting[C]∥Offshore Technology Conference.2001.
[6] Machin J,Allan P A.State-of-the-art jet trenching analysis in stiff clays[C]∥Frontiers in Offshore Geotechnics,2010:871-876.
[7] 沈忠厚.水射流理论与技术[M].东营:石油大学出版社,1998.
[8] 易 灿,李根生,胡永堂.淹没条件下锥形喷嘴射流破岩效率试验研究[J].石油钻进技术,2001,29(1):10.
[9] 胡寿根,朱美洲.淹没水射流冲蚀性能试验研究[J].机械工程学报,1997,33(3):44-48.
[10] Schulte E,Handschuh R,Schwarz W.Transferability of soil mechanical parameters to traction potential calculation of a tracked vehicle [C]∥The Proceedings of the Fifth ISOPE Ocean Mining Symposium. Tsukuba,Japan.2003:121-131.
[11] Morgan N,Cathie D,Pyrah J,et al.Tracked subsea trencher mobility and operation in soft clays [C]∥Proceedings of the 7th ISOPE Conference.Cupertino,California,USA:ISOPE.2007:1366-1373.
