采用脉宽调制式舵机的滚转导弹自动驾驶仪设计与研究
2014-06-27范世鹏林德福祁载康路宇龙姚怀瑾
范世鹏,林德福,祁载康,路宇龙,姚怀瑾
(1.北京理工大学宇航学院,北京 100081;2.北京航天自动控制研究所,北京 100854;3.北京电子工程总体研究所,北京 100854)
采用脉宽调制式舵机的滚转导弹自动驾驶仪设计与研究
范世鹏1,2,林德福1,祁载康1,路宇龙3,姚怀瑾1
(1.北京理工大学宇航学院,北京 100081;2.北京航天自动控制研究所,北京 100854;3.北京电子工程总体研究所,北京 100854)
滚转导弹广泛采用脉宽调制(PWM)模式控制继电式操纵机构,因此研究PWM模式在滚转导弹控制中的应用。给出了两回路驾驶仪设计增益与弹体振荡频率、阻尼之间的关系;重点分析低频PWM所带来的控制耦合效应特性,讨论了耦合大小与弹体时间常数、自旋频率之间的等量关系。通过频谱分析,得到通道耦合干扰的频谱特性。制导与控制指令经PWM后频谱保持不变,但引入了与自旋频率、调制频率和弹体振荡频率相关的高频干扰。为消除控制耦合的影响,根据以上结论,提出这类导弹自动驾驶仪频带设计的一般准则,对这类导弹控制系统的总体设计有参考意义。数学仿真和半实物仿真结果表明,合理设计自旋频率、调制频率和驾驶仪频率,可以有效抑制控制耦合,提高制导精度。
兵器科学与技术;滚转导弹;脉宽调制;控制耦合;频谱分析
0 引言
对于滚转弹体,制导与控制指令被转速调制,对舵机频带提出了更苛刻的指标要求。有限的舵机频带是限制滚转导弹自动驾驶仪响应速度的主要因素[1]。而脉宽调制(PWM)式舵机利用大增益系统饱和特性,具有高频响的特点,文献[2-3]给出了该类舵机的设计与特性分析。此外,PWM式气动舵机还具有结构简单、成本低、技术成熟、能耗小等优点。在滚转导弹的工程应用中,PWM式舵机已被广泛采用。但PWM模式在工程应用中往往存在一些问题,文献[4-5]均指出PWM模式的高频谐波会引起系统固有抖动。
驾驶仪可以加快弹体响应速度,并提高制导精度,但PWM模式将在滚转导弹通道之间产生一定的控制耦合,需要利用弹体低通特性削弱耦合的影响,使驾驶仪提高弹体振荡频率受到限制,从而导致控制系统性能与制导精度形成矛盾。本文重点分析了这类BangBang舵的控制耦合特性,同时,以两回路驾驶仪为例,研究了舵指令经PWM后准弹体系下的频谱特性,旨在讨论这类导弹自旋频率、调制频率和弹体振荡频带之间的关系,从而为该类导弹驾驶仪设计提供理论参考依据。
1 控制系统
对于采用三位式舵机的滚转导弹,广泛采用的指令模式为PWM,如图1所示。调制频率为fc=1/Tc, 0~t1为舵机的工作时段,t1~Tc为舵机休整时段。指令中心时刻为τ,最大脉冲宽度为t1.在每个调制周期初始时刻,采样制导与控制系统的模拟舵指令并进行PWM,脉冲宽度与模拟指令的大小正相关,极性相同。在脉冲宽度内,舵偏角为常值δmax.
图2给出了某滚转导弹一个通道舵机对调制指令的时域响应曲线。当舵响应达到最大值的80%时,即可认为舵面到位。
对于低频指令,三位式舵机环节可以近似等价为纯延迟环节。设迟滞时间为τd,舵机传递函数为


图1 PWM模式舵指令Fig.1 Command in PWM mode

图2 PWM指令与舵机响应曲线Fig.2 Response of actuator to PWM command
根据弹上器件获得准弹体系下的舵指令,投影到旋转弹体系,由舵机系统执行后,低通特性弹体仅响应其在俯仰和偏航通道的低频分量。滚转导弹控制系统数学模型如图3所示。
图3 滚转导弹制导控制系统Fig.3 Guidance and control system of rolling missile
图3中,γc为超前安装角。在弹体滚转的情况下,由于指令的采样时刻与脉宽调制信号的中心存在一个常值时间差τ,且舵机响应存在迟滞时间τd,将造成控制的相位发生滞后,从而导致通道耦合。工程上常采用超前安装进行静态解耦,使指令信号在调制前左乘以下初等矩阵:

对于轴对称气动外形,准弹体下任意方向的动力学均与俯仰通道保持一致。因此,在线性化假设下,描述俯仰通道动力学的微分方程[4]如(3)式所示:
式中:aα、aδ、aω、bα、bδ为弹体动力学力与力矩气动系数,具体表达式如表1所示。
表1 弹体参数的物理意义和表达式Tab.1 Expressions of dynamic coefficients
表1中,Jz为弹体俯仰轴的转动惯量,S和L分别为特征面积和特征长度,别为俯仰力矩系数导数为升力系数导数。
一般而言,弹体气动特性不理想,需要通过设计自动驾驶仪来改善弹体过渡过程品质,以快速、鲁棒地跟踪制导指令。其中,由一个速率陀螺和加速度计构成的典型两回路自动驾驶仪具有响应速度快、结构简单便于实现等优点,其结构如图4所示。在此以两回路驾驶仪为例,对PWM造成的耦合效应进行分析。

图4 两回路驾驶仪结构Fig.4 Classical two-loop autopilot topology
图4中,vm为导弹飞行速度,kϑ·、Tm、μm、Ti、A1、A2是与各项动力学系数相关的参数:

式中:Tm和μm分别为开环弹体的时间常数和阻尼系数;Ti为攻角滞后时间常数;A1和A2为包含舵面升力的高频环节系数;kϑ·为姿态角速率的前向增益。以两回路驾驶仪作为导弹控制系统,则舵指令包括来自该通道加速度和姿态角速率的线性反馈、来自制导系统的参考输入δr以及来自另一通道的耦合舵分量δco三部分,设驾驶仪两个回路的反馈增益分别为Kg、KA,则

可以证明,根据导弹动力学系数的特点进行简化,引入两回路驾驶仪后的弹体振荡频率(与弹体时间常数互为倒数)、阻尼系数与驾驶仪设计参数的关系可以表达[5]为
通过构建两回路驾驶仪,可实现弹体频率和阻尼系数的任意设置,从而改善导弹动态性能。
2 控制耦合分析
在PWM模式下,弹体滚转使舵的控制方向时刻发生变化,从而造成通道间的控制耦合。工程上通常利用弹体低通特性抑制耦合,使控制作用等效发生在脉冲中心时刻所对应的方向。
提高弹体频率,有利于提高制导精度,但弹体低通特性对控制耦合的抑制作用将会削弱。由于PWM模式引入了非线性,无法采用频域方法来分析PWM模式带来的控制耦合对控制系统的影响,因此以时频分析方法研究控制耦合的影响。
假设滚转角处于区间[-λ,+λ]时,为通道Ⅰ的舵偏转区间,通道Ⅱ舵指令为0,如图5所示。则通道Ⅰ执行脉宽舵指令时在通道Ⅱ上的实时投影,将对其造成控制耦合。通道Ⅰ对通道Ⅱ控制耦合的舵分量为式中:Td为PWM指令的时间宽度。


图5 双通道控制示意图Fig.5 Schematic diagram of dual-channel control
可以证明,在δco的输入下,对通道Ⅱ的控制冲量为0,该通道仍可保持平衡状态。而弹体在平衡位置振荡,致使通道Ⅱ出现有限的位置偏差。

通过求解微分方程组,可得通道Ⅱ的姿态角、速度矢量倾角随时间的运动曲线,从而可以得到位置偏差与弹体时间常数、自旋频率之间的函数关系:

由以上公式可知,增大阻尼系数可以减小耦合,求取函数极值点,将耦合位置偏差最大时对应的自旋频率定义为谐振频率,谐振频率与弹体时间常数ωm、弹体阻尼μm有关:

图6给出了在通道Ⅰ输入最大宽度情况下,一个控制周期内,控制耦合造成通道Ⅱ位置偏差|Γx|随自旋频率ωx、弹体时间常数Tm变化的曲线。由图6可知,在PWM模式下,要求自旋频率不得过低,否则控制耦合影响较大,不利于提高制导精度。随着自旋频率的升高,位置偏差急剧下降。
图7给出了在最大宽度舵指令输入下,一个控制周期内的位置偏差与弹体时间常数之间的曲线簇,分别对应不同的自旋频率。随着弹体时间常数增大,控制耦合效应减小。当弹体时间常数减小到自旋频率接近弹体谐振频率时,控制耦合带来的位置偏差达到峰值。自动驾驶仪的意义在于减小弹体时间常数,以加快弹体响应。但在PWM模式下,设计驾驶仪时,必须保证弹体时间常数不能过小。因此,为抑制控制耦合,自旋频率和弹体频率必须在合理的范围。
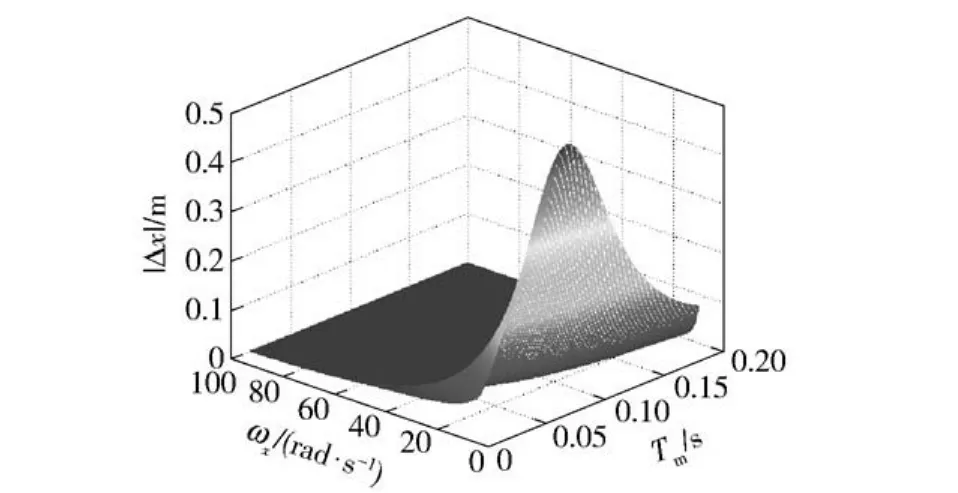
图6 位置偏差与ωx、Tm的函数关系Fig.6 Function relationship among position deviation and ωx,Tm

图7 位置偏差与弹体时间常数Tm的函数关系Fig.7 Function relationship between position deviation and Tm
通过以上理论推导与定量分析可知,滚转导弹自旋频率应远大于弹体振荡频率ωm,印证了文献[5]中自旋频率与弹体振荡频率之间的约束条件:

3 频谱分析
钱学森对于PWM在文献[6]中分析这类继电非线性问题时,认为被控对象具有低通滤波特性,忽略高频干扰的影响。然而,所忽略的高次谐波将引起系统的抖动[7],抖动强度与弹体频率密切相关。因此,对调制信号进行频谱分析,对于驾驶仪设计有重要意义。
为便于分析,在准弹体系下,设偏航通道指令为0,而俯仰通道的制导与控制指令为

则在弹体系下,两个通道舵指令分别为


PWM前,在每个控制周期的初始时刻,对两个通道的模拟控制信号进行采样:

将采样信号调制为图1所示的脉冲宽度指令δ″*bc,这里考虑补偿调制所带来的舵效率损失,舵指令宽度计算公式如(15)式所示:
利用(16)式,对脉宽指令取拉普拉斯变换,进行频谱分析,通过分析调制前后的频谱变化,分析调制所带来的对控制系统的影响。

利用(14)式和(15)式,通过数值计算和坐标变换,可以得到弹体系下的PWM信号频谱以及调制信号指令投影到准弹体系下的信号频谱。设控制系统PWM调制频率为50 Hz,弹体振荡频率为2 Hz,弹体自旋频率为7 Hz.图8和图9分别为弹体系下一个通道的PWM信号和其单边频谱。
控制系统以调制频率fc(rad/s)对上述制导与控制指令信号进行采样,必须满足香农采样定理。为使采样效果更接近真实,调制频率fc应足够高。
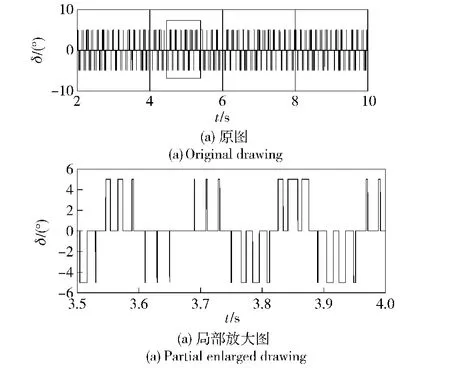
图8 被调制的PWM指令Fig.8 Modulated command in PWM mode

图9 弹体系PWM指令的频谱特性Fig.9 Spectrum of command in PWM mode
一般而言,fc应为有用信号最高频谱的3倍以上,即



由(17)式和(18)式可得弹体振荡频率的上确界,即驾驶仪设计中,控制耦合对弹体振荡频率的约束条件,导弹动态性能要求弹体阻尼不低于0.5.

图10 准弹体系下指令的频谱特性Fig.10 Spectrum of command in pitch
由此可见,对于采用PWM控制模式的滚转导弹,自旋转速受到PWM频率的限制,而驾驶仪频带同时受到自旋频率和调制频率的限制。
4 仿真验证
设计各项频率名义值,已知PWM频率为30 Hz,转速为7 r/s,则设计驾驶仪使弹体振荡频率由1.8 Hz提高到3 Hz.为验证以上设计准则的合理性,分别建立采取PWM式和比例式舵机滚转导弹6自由度数学模型。在俯仰拉偏条件下进行数学仿真,末制导段两个通道姿态曲线如图11所示。
图11 末制导段俯仰角和偏航角曲线Fig.11 Curves of attitude in terminally guided trajectory
从图11可以看出,在脉宽调制和不调制两种条件下,姿态运动曲线差异很小。且导弹均命中目标,脱靶量分别为0.06 m和0.23 m,从而验证了弹体频率设计准则的合理性。
为进一步验证,建立某激光制导体制的滚转导弹半实物仿真系统,方案如图12所示。
图12 半实物仿真实验方案Fig.12 Diagram of hareware-in-the-loop simulation
三轴转台模拟弹体姿态运动,弹上计算机根据半主动平台式导引头采用比例导引制导,并以速率陀螺反馈的姿态角速度和仿真机模拟的过载信号,构建两回路驾驶仪,实时生成PWM的制导与控制指令,传送到仿真机,由仿真机完成弹体动力学与运动学的数学仿真,分别为转台提供指令,复现弹体姿态和目标。当弹目距离为60 m时,导引头进入盲区。当导弹落地时,仿真结束。
PWM频率固定为30 Hz,弹体名义转速为7 r/s,为防止弹体谐振振幅过大,将弹体阻尼设为0.6.依据(11)式和(18)式,所选取的弹体振荡频率不应超过3.68 Hz.在多组弹体振荡频率下设计相应两回路驾驶仪,分别进行30次半实物仿真实验。使用的驾驶仪参数和脱靶量统计结果如表2所示。

表2 半实物仿真统计结果Tab.2 Statistical results of hareware-in-the-loop simulation
从仿真结果可以看出,当设计的弹体振荡频率适当提高时,制导精度得以提高;当弹体振荡频率超出设计准则的上确界后,制导精度随弹体振荡频率的增大而降低,有力验证了设计准则的正确性。
5 结论
在调制频率较低的情况下,通过时域分析,研究PWM所引起的通道间控制耦合。并通过频谱分析,得到了经PWM后准弹体系下指令的单边频谱,有用指令的频谱在调制前后保持不变,但引入了频谱与弹体振荡频率、调制频率和自旋频率相关的干扰分量。
基于以上研究结果,提出这类滚转导弹驾驶仪频带、调制频率和自旋频率三者之间的设计准则。为利用弹体低通特性消除PWM带来的控制耦合,提出弹体振荡频率、自旋频率和调制频率之间的不等式准则,从而为该类导弹自动驾驶仪的设计提供了理论参考依据。数学仿真和半实物仿真验证了该准则的正确性。
(References)
[1] Lang B O,Fleming A W,Parkinson B W.Control synthesis for spinning aerospace vehicles[J].Journal of Spacecraft and Rockets,1967,4(2):142-150.
[2] 许宏,赵克定,许宏光,等.一种新型的高频响导弹气动舵机的动力机构特性分析[J].南京理工大学学报,2000,10(5): 425-428.
XU Hong,ZHAO Ke-ding,XU Hong-guang,et al.Research on the characteristics of a new high frequency response missile pneumatic-servo-actuator[J].Journal of Nanjing University of Science and Technology,2000,10(5):425-428.(in Chinese)
[3] Yao X X,Chen H C.A kind of PWM pneumatic servo control system modulation methods and dynamic responses[J].Journal of Beijing Institute of Technology,1992,1(1):50-58.
[4] KorenA,IDan M,Golan O M.Integrated sliding mode guidance and control for a missile with on-off actuators[J].Journal of Guidance,Control and Dynamics,2008,31(1):204-214.
[5] 钱学森.工程控制论[M].上海:上海交通大学出版社,2009: 141-146.
Tsien Hsue-sen.Engineering cybernetics[M].Shanghai:Shanghai Jiaotong University Press,2009:141-146.(in Chinese)
[6] Zarchan P.Tactical and strategic missile guidance[M].3rd ed. Reston,VA:AIAA,1997.
[7] 范军芳,林德福,祁载康,等.两回路自动驾驶仪设计与分析[J].系统工程与电子技,2008,30(2):2447-2450.
FAN Jun-fang,LIN De-fu,QI Zai-kang,et al.Design and analysis of a two loop autopilot[J].Journal of Systems Engineering and Electronics,2008,30(2):2447-2450.(in Chinese)
[8] 邹汝平,张延风.旋转导弹自旋频率设计[J].兵工学报, 2007,28(2):220-222.
ZOU Ru-ping,ZHANG Yan-feng.Design of self-spin frequency for rotating missiles[J].Acta Armamentarii,2007,28(2):220-222.(in Chinese)
[9] 权维利,姚晓先,林凡.冲压式气动系统的建模与线性化分析[J].兵工学报,2010,31(8):1125-1130.
QUAN Wei-li,YAO Xiao-xian,LIN Fan.Modeling and linearity analysis of ram-air servo system[J].Acta Armamentarii,2010, 31(8):1125-1130.(in Chinese)
[10] 范世鹏,林德福,路宇龙,等.激光制导武器半实物仿真系统的设计与实现[J].红外与激光工程,2014,43(2):394-397.
FAN Shi-peng,LIN De-fu,LU Yu-long,et al.Design and achievement of hardware-in-the-loop simulation system for guided shell based on laser semi-active seeker[J].Infrared and Laser Engineering,2014,43(2):394-397.(in Chinese)
Design and Research of Rolling Missile Autopilot with Pulse Width Modulation Actuator
FAN Shi-peng1,2,LIN De-fu1,QI Zai-kang1,LU Yu-long3,YAO Huai-jin1
(1.School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China; 2.Beijing Aerospace Automatic Control Institute,Beijing 100854,China; 3.Beijing Institute of Electronic System Engineering,Beijing 100854,China)
Pulse width modulation(PWM)actuator system has been widely used for rolling missile.The application of PWM in control system of rolling missile is studied.The relationship between the autopilot gain and the dynamic characteristics of missile,such as oscillation frequency and damping radio,is described,the characteristic of control coupling resulting from low frequency PWM is mainly analyzed,and the relation among coupling strength,spinning frequency and aerodynamic time constant is discussed. The spectral characteristics of disturbance caused by coupling are obtained by spectral analysis.After modulation,the spectra of guidance and control commands for actuator remain unchanged;however,a high-frequency interference is introduced,which is related to spinning frequency,modulation frequency, and oscillation frequency of missile.Finally,the design criteria for autopilot of the missile are proposed based on the above conclusions.The mathematical simulation and Hardware-in-the-loop simulation resultsshow that the application of PWM in rolling missile is feasible,and the design based on the criteria can reduce the effects of control coupling,and also improve the guidance precision.
ordnance science and technology;rolling missile;pulse width modulation;control coupling;spectrum analysis
TJ765.4
A
1000-1093(2014)10-1612-07
10.3969/j.issn.1000-1093.2014.10.014
2013-11-19
国家自然科学基金项目(61172182)
范世鹏(1986—),男,博士研究生。E-mail:fspzxm@sina.com;林德福(1971—),教授,博士生导师。E-mail:lindf@bit.edu.cn