低速作业工况船模拖带自航试验
2014-06-27,,
, ,
(1.中国水产科学研究院 南海水产研究院,广州 510250;2.武汉理工大学 交通学院,武汉 430063)
随着海洋油气资源开发、鱼类捕捞逐渐向深远海发展,近海供应船、锚作拖船、铺管船、物探船、挖泥船、拖网渔船等各类船舶得到了越来越广泛的应用。这些船舶均属于典型的多工况船舶,其常用的工况包括自由航行工况和低速拖带航行工况(对于带有动力定位要求的船舶则还包括系柱工况),以往的研究大多只关注自由航行工况,而对于拖带航行工况则较少涉及。不同于自由航行工况,船舶在拖带作业工况下往往对应着较低的航速(甚至零航速)和较大的螺旋桨负荷,船桨相互影响表现出明显不同的特征,在系柱工况下,伴流分数和相对旋转效率也失去其原有意义[1]。虽然第26th国际拖曳水池会议(ITTC)在其自航试验推荐规程“7.5-02-03-01.1”中给出了系柱拖力试验和拖带自航试验的建议方法,但并没有涉及实船拖力预报[2-3]。为此,提出一套船模拖带自航试验方法。
1 船模拖带自航试验及实船拖力预报方法
1.1 船模拖带自航试验方法
船模拖带自航试验与一般意义上的自航试验流程基本一致,采用相同的船模、螺旋桨及测试系统,两者最主要的区别在于进行船模拖带自航试验时需在船模上施加一向后的船模拖力FPM。船模速度为VM,拖带自航下的力系平衡关系见图1。

图1 拖带自航下的力系平衡示意
在低速拖航工况下,对于指定的实船拖力FPS,施加于模型的船模拖力FPM为一定值,两者满足缩尺比的三次方关系,
(1)
式中:ρM,ρS——模型和实船对应的水密度;
λ——缩尺比。
在考虑推力减额t后,力的平衡关系为
T(n)×(1-t)=FPM+RM-Z(n)
(2)
拖带自航试验虽然对应于较低的航速,但仍需进行摩擦阻力修正以确定实船自航点。其确定方式与常规自航试验一致,即强制力Z(n)与拖航航速对应的摩擦阻力修正FD平衡时正好对应于实船的自航点,试验中需记录的数据包括螺旋桨的转速nM,推力TM以及转矩QM。摩擦阻力修正值按下式进行计算[4]
(3)
式中:RM,RS——同弗氏数船模和实船阻力。
由式(3)可见,对于某一确定的拖带航速VM,RM与FD均为定值。根据公式(1)和(2),当要求的实船拖力发生变化时,船模拖力、螺旋桨所需发出的推力,以及螺旋桨需要的转速均随之变化,螺旋桨工作点的变化意味着其将产生不同的抽吸作用,从而通过对流场产生影响,一定程度上也将改变最终的船桨相互影响特征。
对于系柱工况,船模阻力和强制力均为零,螺旋桨的有效推力等于船模系柱拖力
T(n)×(1-t)=FBPM
(4)
注意船模系柱拖力FBPM不同于低速拖航工况下的船模拖力FPM,前者根据模型试验测得,而后者是根据实船拖力要求按公式(1)计算所得并预先施加于船模上。由式(4)不难看出,当螺旋桨转速不同时,螺旋桨发出的推力不同,船模系柱拖力不同,随之变化的还包括推力减额分数。为此,第26th ITTC建议在进行系柱拖力试验时,需进行不同转速的试验以充分考虑不同负荷对推力减额分数的影响,并建议从100%MCR依次递减至40%MCR,这也从侧面表明业内已逐渐认识并重视螺旋桨负荷对推进因子的影响。
1.2 实船拖力预报方法
常规自航试验通常是在设计航速附近选定几个航速,分别进行自航试验,然后根据自航试验结果预报实船达到该航速所需的收到功率,再通过与实船主机能够提供的收到功率进行比较以完成最终的航速预报。对于拖带航行工况同样可采用上述方法进行航速预报,其惟一的区别在于计算螺旋桨需要发出的推力时应同时考虑实船阻力RS与实船拖力FPS,其量纲一的量形式为
(5)
式中:N,D——实船螺旋桨转速和直径。
RS可根据RM按二因次或三因次方法进行换算,需注意的是此时FPS为给定值,不随航速变化。另外,在进行实船性能预报时,仍假定推力减额分数和相对旋转效率不受尺度效应影响,而实船伴流分数可根据笹岛秀雄方法进行换算[3]
(6)
式中:wS,wM——实船和船模伴流分数;
CFS,CFM——实船和船模的摩擦阻力系数。
根据以上步骤可预报给定主机功率,且稳定输出指定拖力的情况下实船所能达到的航速。但实际情况往往是拖航工况的航速一般根据作业要求而设定,如2 kn铺管工况、5 kn挖泥工况、6 kn拖网工况,等等,相反实船的拖力预先是未知的,且铺管设备、耙头/绞盘、网具等设备的阻力随航速的变化也不可能固定不变。因此,对于拖航性能预报而言更具现实意义的应该是在给定的航速下预报所能提供的拖力,而非在给定的拖力下预报所能达到的航速。
考虑到螺旋桨负荷对船艉流场的影响,并结合上述拖航作业实际情况,笔者认为在进行拖带自航试验时,不应按照常规自航试验采取变航速固定拖力的方式进行,而应采取固定航速变拖力的方式来进行。其步骤大致如下。
1)在作业工况对应的船模速度下,假定若干个实船拖力,根据式(1)计算船模拖力并分别施加于船模,进行拖带自航试验。
2)根据要求的实船拖力及自航试验结果,计算实船所需要的主机功率。
3)将上一步所得要求拖力-需要主机功率曲线与实船主机功率相交,可得最终实船拖力。
2 案例船分析
2.1 主尺度及工况说明
选取一艘拖网渔船开展拖带自航模型试验研究,该船采用圆舭线型,带球艏,双机双桨,表1给出了实船主尺度及相关参数。

表1 实船主尺度及相关参数
2.2 系柱拖力试验
针对系柱工况,选取300~700 r/min转速分别进行系柱拖力试验,在不考虑尺度效应的前提下,根据式(6)可初略估计实船所需收到功率,所选转速对应的主机负荷范围为11%~138%MCR。
(6)
图2给出了不同主机负荷情况下的船模拖力及推力减额分数曲线。可以看出,随螺旋桨转速的增加,船模系柱拖力逐渐增加,推力减额分数同样呈增加趋势,在达到80%MCR后趋于稳定,但由于该船底部非常平坦,推力减额绝对量级很小,其总的变化并不明显。

图2 系柱拖力试验结果
2.3 拖带自航试验
1)变航速固定拖力方式。按照常规变航速固定拖力的方式进行拖带自航试验。根据给定的实船要求拖力FPS=78.5 kN,由式(1)计算得船模拖力FPM=41.85 N,并施加于船模,依次在5个速度下进行拖带自航试验。表2和图3分别给出了实船船型因子随航速变化特征,图4给出了实船螺旋桨净拖力为78.5 kN时的航速预报结果,在主机功率储备10%,轴系及齿轮箱效率均为0.97时,实船航速可达6.53 kn。

表2 FPS=78.5 kN时船型因子及所需收到功率

图3 FPS=78.5 kN时船型因子随航速变化曲线

图4 FPS=78.5 kN时航速预报
2)固定航速变拖力方式。针对指定的6 kn拖网工况,随后进行了变拖力的拖带自航试验研究。表3和图5分别给出了实船船型因子随拖力变化特征。不难看出,随负荷的增加,螺旋桨转速增加,船型因子均呈现出比较明显的变化。图6给出了实船航速为6 kn时的拖力预报结果,在相同的主机功率储备及机械传递效率下,螺旋桨净拖力为85.8 kN。

表3 VS=6 kn时船型因子及所需收到功率

图5 VS=6 kn时船型因子随拖力变化
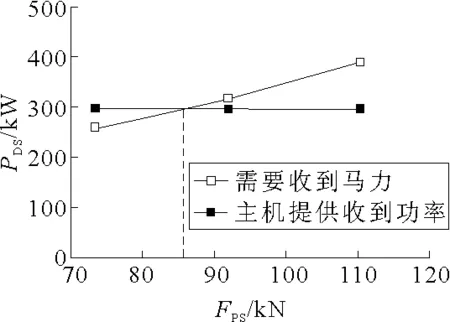
图6 VS=6 kn时拖力预报
相比较变航速固定拖力方式,采用固定航速变拖力方式可更真实地模拟实际螺旋桨负荷状态,从而准确地反映船桨相互影响特征,为后续船机桨匹配设计或拖力预报提供合理的输入参数。另一方面其预报实船拖力更为直观,在图6上可直接读出实船主机功率对应的实船拖力,使用更为方便。
3 结论
1)船模拖力变化时,螺旋桨工作点发生变化,将对船型因子产生一定的影响。
2)采用固定航速变拖力的方式进行拖带自航试验,进而预报实船拖力,可更真实地模拟实际螺旋桨负荷,从而准确地捕捉拖航工况下的船型因子,且预报实船拖力更为方便,使用也更为直观。但由于本文选择的船型艉部比较平坦,推力减额和伴流分数绝对值均比较小,在试验中各量总的变化均不大,后续研究中可选择艉型相对丰满的船型来进行研究,以便充分地证明本文提出方法的合理性和适用性。
[1] MINCHEV A, NIELSEN J R, LUNDGREN E. Ducted propeller design and verification for contemporary offshore support vessels[C]∥Proceedings of First International Symposium on Marine Propulsors (SMP’09), Trondheim, Norway, 2009.
[2] Propulsion/Bollard Pull Test[C]∥International Towing Tank Conference, ITTC-Recommended Procedures and Guidelines (7.5-02-03-01), Rio de Janeiro, Brazil, 2011.
[3] 郭春雨,赵庆新,赵大刚.基于CFD仿真模拟的船模自航试验数据处理[J].船海工程,2013,42(3):17-20.
[4] 盛振邦,刘应中.船舶原理:下册[M].上海:上海交通大学出版社, 2003.
