基于SolidWorks的机构创新设计教改实践
2014-06-26赵林林
赵林林
(江苏财经职业技术学院机械与电子工程系 江苏 淮安:223003)
目前的机构创新实践教学中,多以教材的平面机构为主,一般通过预定的方案对硬件进行搭接操作,然后对搭接后的机构进行验证性分析,这种演示性的实验缺乏创新性,学生会感到没有兴趣,学生的创新思维能力得不到很好地训练。
此外,学生在传统的机构创新实验平台上搭建机构时,受其结构和功能的限制,只能做一些平面机构,对机构的分析和修改困难,而且搭建后的机构容易产生干涉,实验教学效果不是很好。
随着计算机技术的不断发展,国内外很多的三维绘图软件在我国工程领域和教育领域不断地应用,如三维设计软件SolidWorks、Ug、Pro/e等正在逐渐成为机械工程中应用广泛的设计工具,与其集成的三维动力学仿真软件应用也越来越广泛。
正因为如此,笔者在机构创新课中引入三维设计及分析软件,将课程的实践教学与先进的三维虚拟仿真分析技术相结合,可以提高学生的空间想象能力,培养和激发学生的创新动力和创新意识。利用三维软件Solidworks的装配功能,培养学生的机械产品的创新设计能力,利用三维软件Solidworks的运动仿真功能,可以培养学生的机械产品设计成就感。
1 构建基于Solidworks的机构创新实践项目
确定基于Solidworks的机构创新实践命题领域和方向,以机械零部件为基本构件,辅以各种不同类型的运动副和主机架,以所学过的各种典型机构为基础,尽量减少条条框框的束缚,给学生以极大的想象空间,让他们充分发挥自己的创新意识和奇思妙想,最大限度地调动他们的主动性、积极性、创新性和实践动手能力,按照机构运动原理和组成原理,把各自的创新思想贯穿在机构创新设计方案中,在Solidworks软件上完成零件绘制、装配并做运动仿真分析。
结合慧鱼组合模型的创新机构,共确定了5个机构创新实践项目的选题,遵循由易到难,循序渐进、螺旋提升的原则进行教学内容的设计,以培养学生的机械系统分析能力、设计能力和创新能力为目标。注重于开阔学生的思维,强调学生的创新思维与创新方法,培养学生综合运用专业知识进行创新设计的能力。使学生具有团结合作精神和认真严谨的学习态度、具有一定的沟通知识和技巧、具有一定的创新意识。表1为机构创新实践项目。
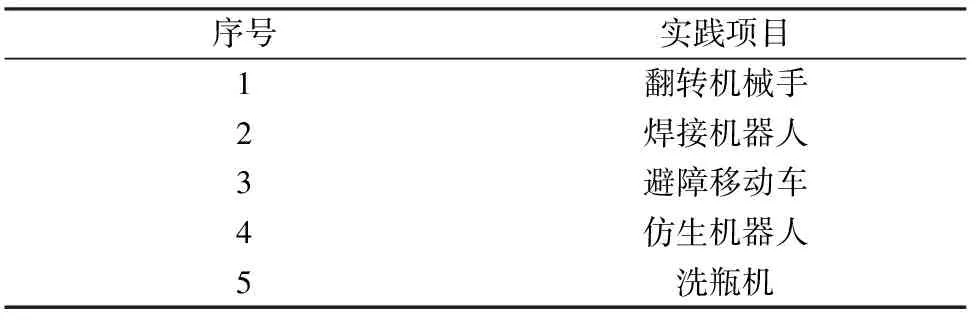
表1 基于Solidworks的机构创新实践项目
2 基于Solidworks的机构创新实验教学的教学模式
在具体实施过程中,学生以“个体-团队”形式开展,分组后每组成员独立完成、独立考核。对每一个实践项目按照运动方案拟定—建模—仿真分析进行实施,教师鼓励每组做出最优结果,然后由同学上台利用PPT进行讲解,再由教师进行综合评价,保证学生创新能力培养的普遍性和基础性。
项目实践之前,由教师布置任务,指导学生运用创新思维,结合《机械设计基础》课程上讲过的机构演化方法,按小组完成创新设计方案,通过与教师讨论,对方案进行修改和完善,最终确定个人的实践方案。在实践过程中,我们采用Solidworks三维设计软件自行绘制构件,适当改变参数,确定形状,大小不一的连杆、滑块、凸轮、齿轮、槽轮、轴、带、螺栓、键及弹簧等机械零部件的基本构件,完成对构件的建模,然后由学生按照确定的实践方案,在Solidworks三维设计软件中利用其装配功能,添加不同类型的运动副和机架,完成机构的虚拟化装配,检查构件之间有无干涉。然后可以继续添加驱动器,实现机构的动态运动仿真,完成机构的运动轨迹、位移、运动干涉情况的分析。
然后再由学生和教师共同讨论小组内不同方案的运动性能和动力性能,对不同的方案进行比较,从而最终确定最佳的创新设计机构。
由教师继续引导学生利用Solidworks三维设计软件对零件进行绘制,完成零部件的建模装配和运动仿真。
通过这种教学模式,不但提高了学生的实验设计能力及准备的能力,而且激发了学生积极创新和热爱实践活动的热情,同时不断提高学生的计算机辅助设计的能力。
3 基于Solidworks的机构创新实践教学的评价考核方法
考核要保证每一个学生的工作量和难度适中,要求在机械创新设计中主要突出机构运动方案的拟定和机械传动与执行部分的设计,要求传动方案中至少含有两种常用机构且有4-8个传动构件,要求有必要的设计计算和结构设计。
实践完成后进行组内评价、教师评价及学生互评;在总结提高环节,通过师生共同总结、课外拓展,实现知识和技能的提升。评价内容主要有方案可行性、结构合理性、计算严谨性、经济性、功能演示、讲解、答辩、计算说明书、方案草图、模型及仿真分析结果等。
4 以“翻转机械手”项目为例的机构设计
4.1 任务描述
由教师布置任务,并简单介绍翻转机械手的基本功能,指导学生运用创新思维,在现有的翻转机械手的基础上,进行方案的设计。
4.2 计划与决策
由学生按照小组的形式进行讨论,要实现翻转机械手的机身回转运动,可选方案有:蜗轮蜗杆、齿轮、链传动、带传动、连杆传动等;要实现翻转机械手的臂部的升降直线运动,可选的方案有:气缸、丝杠螺母、凸轮、齿轮齿条、连杆等;要实现翻转机械手的臂部的前后直线运动,可选的方案有:气缸、丝杠螺母、凸轮、齿轮齿条、连杆等;要实现翻转机械手的手爪的夹紧、放松,可选的方案有:夹持式、勾托式、吸附式、拟手指式等。
通过老师的指导,对可选方案进行比较,确定机身回转运动采用蜗轮蜗杆传动;臂部升降运动采用丝杠螺母传动,臂部伸缩运动采用丝杠螺母传动;机械手爪采用夹持式的结构。
4.3 实施
教师继续指导学生利用Solidworks三维设计软件首先完成翻转机械手的机构简图并进行计算和结构设计,然后对具体零件进行绘制,完成零部件的建模装配和运动仿真。此项任务占据大部分的时间,需要学生能够认真完成。
4.4 评价
学生完成之后,利用Solidworks进行翻转机械手的演示,并对翻转机械手的计算设计过程进行PPT讲解。由学生自评、互评,教师最终评价完成学生的考核。
5 三维设计软件应用在机构创新课程中的建议
本课程是一门综合性实践性很强的课程,需要用到大量的机械方面的知识,在实施过程中,要想成功地将三维软件应用在机构创新课程中,需要学生熟练地掌握一种三维绘图软件及《机械设计基础》这门课程,否则学生学习起来将有一定的难度。
此课程宜采用项目导向的教学方法进行,需要引导学生去发现问题并解决问题,课堂上通过布置任务,学生利用课后的时间查阅大量的资料,并采用三维设计软件进行设计、仿真,学生学习的自主性很大。对于学生来讲,有点难度,因为很多东西需要再创造,没有现成的东西直接拿来用。所以在实施过程中,需要采取一定的措施保证学生能够积极地完成。
以前开设的机构创新课,没有采用三维设计软件,直接在实验室利用慧鱼模型进行组装搭建,一般学生都是按图搭建,创新能力没有得到提高,学生的收获不是很大。但是在采用Solidworks三维设计软件之后,学生的学习欲望加强,因为Solidworks软件的熟练运用将直接应用在以后的工作中,具有针对性,虽然比以前的课程有一定的难度,但是学生学到的内容会更多。通过本课程的学习,对以后学生的毕业设计及工作岗位能力打下坚实的基础,可以说本门课的每一个项目对学生掌握本专业的知识都有着非常重要的作用。
学生在机械运动方案设计、三维设计及仿真分析软件应用以及团队合作方面,得到较高水平的训练,激发创新意识,增强实践能力。
6 结束语
将Solidworks软件应用在机构创新实践教学中,不仅丰富了课程教学内容,拓宽了机械设计基础课程的教学体系,最重要的是培养了学生的创新实践能力,可以增强学生的团队合作意识和继续学习的能力。同时,在教学改革中能够激发教师求真务实的工作热情,最大程度地调动学生的学习积极性。
将三维软件Solidworks应用在机构创新实践教学改革中,符合机械设计基础课程的建设目标和发展要求,符合高等职业技术院校培养高素质、高技能、创新型人才的总体目标,能够为培养学生专业方面的创新思维和创新能力做出了一定的探索和实践,为推广和应用三维软件在课程建设中奠定基础。
[1] 王润虎,同志学,刘丽燕.机构创新设计实验及CAI方法探讨[J].西安建筑科技大学学报:社会科学版,2004,23(1):73-78.
[2] 付晓莉,车江宁,张伟杰.机构创新设计实验立体化教学模式研究[J].实验室科学,2011,14(2):41-43.
[3] 孔蓉.改进机构实验设备培养学生创新实践能力[J].中国教育技术装备,2012,33:31-32.
[4] 巩勇智.基于三维软件的机构创新实验教学改革研究[J].计算机光盘软件与应用,2012,24:232-233.
[5] 赖德华,张建辉,赵京,等.机构创新设计实验的探索[J].实验技术与管理,2005.22(2):118-124.
[6] 田亚平.机械基础实验教学的改革与实践[J].中国现代教育装备,2011,17:100-101.
[7] 杨金林,陈元斌.机械基础实验教学改革与探索[J].实验室研究与探索,2007,26(2):73-75.
[8] 宋立权,何玉林.机械基础实验实践教学体系改革与实践[J].实验室研究与探索,2009,28(9):88-91.
[9] 刘玲令,李光辉.机械基础创新实验体系建设[J].实验室研究与探索,2009,28(2):100-103.
[10] 张列林,聂昌平.机械基础实验系列教学改革[J].实验室研究与探索,2001,20(6):26-28.