烟幕环境地面红外运动目标快速检测方法
2014-06-25陈志斌刘先红
张 超,陈志斌,宋 岩,刘先红
(军械技术研究所,河北石家庄050000)
1 引言
随着光电成像技术的发展,运动目标检测越来越多地应用于安防、交通、军事等领域。其基本任务是从图像序列中检测出运动信息,从而为后续目标识别与跟踪提供依据。根据摄像机的运动状态,运动目标检测可分为静态场景目标检测和动态场景目标检测[1]。现有的目标检测方法主要有背景减除法、帧差法和光流法[2]等几种。背景减除法和帧差法主要用于静态的视频监控场合[3],光流法[4]通用性强,在摄像机运动存在的前提下也能精确检测出独立的运动目标,但计算量较大,实时性较差。针对动态场景中的运动目标检测问题,目前普遍的解决方法是采用匹配的方法对背景进行运动补偿,如块匹配[5]、SIFT特征匹配等。在烟幕干扰环境下,红外图像成像质量会受到严重影响,导致上述算法的鲁棒性较差,为此本文提出一种快速运动检测方法。首先提取FAST特征点,采用改进的二进制BRIEF特征进行描述以增加对烟幕干扰的鲁棒性,并采用Hamming距离实现图像的快速匹配;采用随机一致性算法(Random Sample Consensus Algorithm,RANSAC)估计全局运动参数并进行运动补偿;采用帧间差分法提取运动目标区域。
2 全局运动模型
由于红外跟瞄系统的热像仪多置于云台上并随云台不断转动,云台的姿态或位置变化必然引起视频序列全局背景的变化,所以背景运动估计的目的就是要精确求出全局运动参数。因此,建立图像全局运动的参数模型非常必要。
本文采用经典的基于平行投影的六参数仿射模型描述全局运动[6],假设目标上的某一点tk时刻在成像平面上的投影坐标为(x,y),在tk+1时刻的投影坐标为(x',y'),则六参数仿射模型可表示为:
这样成像平面中目标点成像的坐标就取决于a0~a5这六个参数。对前后两帧图像中的点即可对参数进行估计,从而补偿图像背景的全局运动。
3 基于特征点匹配的运动估计
3.1 快速特征点匹配方法
一般情况下,红外跟瞄系统处于低速扫描状态,红外序列图像中背景的运动速度较缓慢,可以近似认为背景做平移运动。另外,在对帧间图像进行匹配时,只要目标的大小小于一定范围,则由目标本身的运动导致的对匹配结果的影响亦可忽略。基于上述前提,本文提出了一种快速特征点匹配方法进行运动估计。
FAST(Feature from Accelerated Segment Test)特征点检测是公认的比较快速的特征点检测方法,只利用周围像素比较的信息就可以得到特征点,简单且有效。FAST特征检测算法的基本原理为:假设候选点为p,N表示以p点为中心半径为r的圆周上,与p点灰度值差别足够大的点所组成的最长连续圆弧的像素个数,如果N大于某阈值n,则认为该候选点p为一个特征点。FAST算法示意图如图1所示。

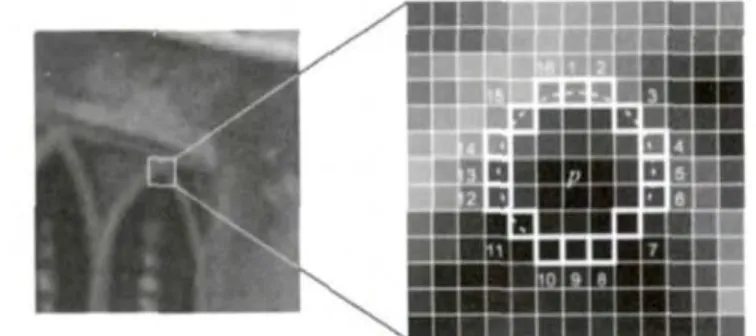
图1 FAST算法示意图Fig.1 schematic diagram of FAST
FAST算法的性能很大程度上决定于门限n的取值,文献[7]表明,n=9时FAST算法提取特征点的效果是最好的,称之为FAST9,故本文采用FAST9提取特征点。
由于烟幕干扰会极大影响红外图像的成像质量,降低目标对比度甚至对目标形成遮挡,而且红外图像本身对比度较低,在自然环境下大面积区域灰度变化缓慢且分布相近,因而传统的特征点描述方法不能很好的兼顾匹配精度和速度方面的性能。文献[8]中提出了一种快速的二进制特征提取方法BRIEF(Binary Robust Independent Elementary Features),该算法充分利用了图像的灰度分布特性,且不依赖于统计特性,因而可以很好地区分灰度分布相近的特征点。该算法流程如下:
1)对图像做平滑处理,降低图像噪声的影响;
2)定义τ测试,公式如下:

其中,x,y是两个像素位置;
3)在特征点周围S×S的像素区域内提取BRIEF特征,即在该区域内选择若干个特定的[x,y]对,并进行τ测试,将所有测试结果构造出一个二进制串。
由于红外图像易受噪声干扰,基于像素位置的BRIEF特征抗噪性能较差。为此,本文采用改进的BRIEF特征,采用随机矩形框对代替点对,进行τ测试时以随机矩形框内的像素均值代替像素值,采用相同的矩形框选取规则对两幅图像的特征点进行描述。其中,随机矩形框大小为2-4像素,且服从高斯分布(文献[8]中的实验表明,该分布具有最佳性能)。
采用Hamming距离对特征点进行匹配。为了进一步提高匹配速度,考虑到背景运动为整体运动,在匹配时需满足以下条件:
1)对于某个特征点,其对应的匹配点位于该特征点的某个邻域内;
2)特征点的运动具有很强的相关性,已匹配的点能为待匹配点提供参考。
3.2 RANSAC运动参数估计
通过对特征点进行提取和匹配,可以得到一系列匹配的特征点对,但不足以代表整幅图像背景的运动,需要在获取匹配点的基础上利用六参数仿射模型估计全局运动参数。
RANSAC算法[9]是根据一组包含异常数据的样本数据集,计算出数据的数学模型参数,得到有效样本数据的算法。其进行运动参数估计的基本思想可描述如下:
1)随机选取n=3(n为求解模型参数所需的最小样本数)对特征点,求解出一组运动参数,作为初始参数;
2)求出样本集中在一定误差范围内满足运动参数的数据点集S,构成该参数的一致集;
3)若S中的数据点个数大于阈值N,予以记录并重新随机选取特征点,重复以上过程;
4)在完成一定的抽样次数后,选择最大一致集计算运动参数。
4 运动补偿及目标检测
估计出基准帧与下一帧图像间的背景全局运动参数后,即可计算出基准帧图像中的每一点(x,y),在下一帧图像上的对应坐标 (x',y')。为解决对应坐标可能出现小数的情况,采用后向映射的方法,将(x',y')映射到基准帧图像中,若对应点坐标包含小数,位于四个像素位置之间,则采用四个像素的均值代替。对完成运动补偿的两幅图像,即可利用帧间差分法进行目标检测,采用自适应阈值分割算法求出目标位置。
5 实验结果及分析
本文中实验均在双核2.2 GHz主频,2GB内存的计算机上利用vs2010和openCV实现,实验素材为分辨率为320×240的中波红外热像仪拍摄的烟幕干扰环境下包含运动坦克目标的红外运动场景图像,如图2和图3所示,其中圆圈标注位置为坦克目标位置。图4~图6分别为采用经典的点匹配算法如SIFT特征匹配算法、SURF特征匹配算法以及本文所提算法进行场景匹配得到的结果,图7为未经过运动补偿直接采用帧间差分法得到的目标检测结果,图8为采用本文算法进行运动补偿后得到目标检测结果。

图2 第1帧红外图像Fig.2 the first infrared image

图3 第2帧红外图像Fig.3 the second infrared image
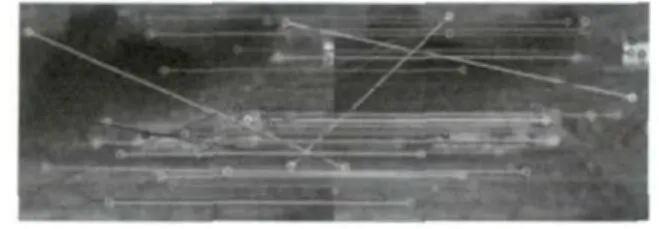
图4 SIFT算法匹配结果Fig.4 Matching result of SIFT algorithm
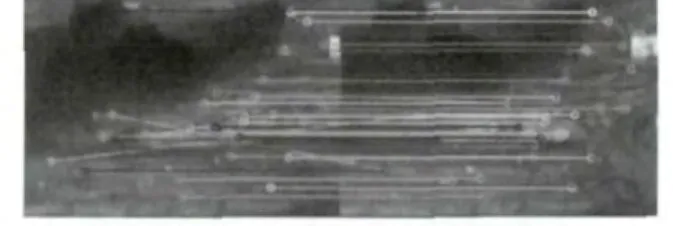
图5 SURF算法匹配结果Fig.5 Matching result of SURF algorithm
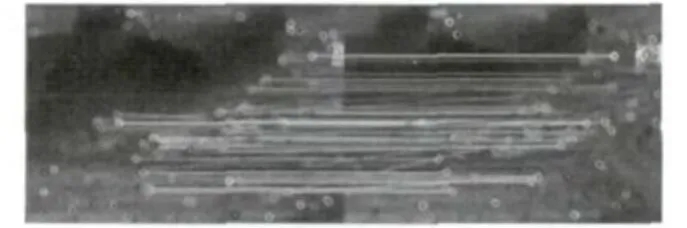
图6 本文算法匹配结果Fig.6 Matching result of our method
图7 运动补偿前目标检测结果Fig.7 target detection before motion compensation
图8 运动补偿前后目标检测结果Fig.8 target detection after motion compensation
各种匹配算法的性能比较如表1所示。通过表1可以直观地看出,采用本文算法可以得到更多的特征点个数,且匹配时间较其他两种经典的算法大大减少。由于没有考虑尺度、旋转等因素,本文算法的正确匹配率较低,但这一缺点可以通过随机一致性算法进行运动补偿时予以弥补,从而在保证目标检测精度的同时极大的提高目标检测速度,且对烟幕干扰具有较强的鲁棒性。
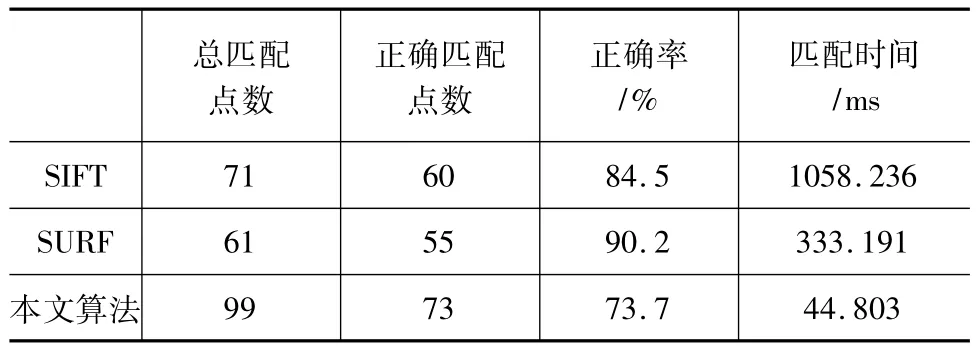
表1 各种算法匹配性能比较Tab.1 Comparison of different algorithms
6 结论
本文针对烟幕干扰条件下红外运动目标检测的难题,提出了一种改进的运动补偿方法。采用FAST特征点提取算法快速提取特征点,并改进了BRIEF特征使其更加适用于烟幕干扰下的红外运动场景的匹配。实验结果表明,该算法对烟幕干扰具有较强的鲁棒性,且能够满足红外跟瞄系统运动时运动目标快速检测需求。
[1] Li Jian,Lan Jinhui.A novel fast moving target detection method[J].Journal of Central South University:Science and Technology,2013,44(3):978 -984.(in Chinese)李建,蓝金辉.一种新型快速运动目标检测算法[J].中南大学学报:自然科学版,2013,44(3):978-984.
[2] Lu Shan.Research on Techniques of Detection and Discrimination of IR Object[D].Changchun:Changchun U-niversity of Science and Technology,2009.(in Chinese)卢珊.红外目标检测识别技术研究[D].长春:长春理工大学,2009.
[3] Chen Wenhui,Zhang Jing.A method based on background subtraction and frame difference algorithm for moving target detection[J].Electronic Design Engineering,2013,21(3):24 -26.(in Chinese)陈文会,张晶.一种基于背景减法和帧差的运动目标检测算法[J].电子设计工程,2013,21(3):24 -26.
[4] Zhang Qiujia,Wang Hong.Moving object detection optical flow vectors compensation model[J].Laser & Infrared,2011,41(11):1263 -1266.(in Chinese)张秋佳,王虹.光流向量补偿模型的运动目标检测[J].激光与红外,2011,41(11):1263 -1266.
[5] Zhang Afei,Shen Haibin.Difference based search algorithm for fast block - matching motion estimation[J].Computer Engineering and Applications,2013,49(6):127 -130.(in Chinese)张阿飞,沈海斌.基于差分的块匹配运动估计算法[J].计算机工程与应用,2013,49(6):127 -130.
[6] Xiao Yuwei.Researching on Algorithms of Motion Detecting and Tracking In Moving Background[D].Shanghai:Donghua University,2011.(in Chinese)肖宇嵬.运动场景中的目标检测与跟踪算法的研究[D].上海:东华大学,2011.
[7] Yen -Kuang Chen,Tian X,Steven Ge.Towards efficient multi-level threading of H.264 encoder on Intel hyperthreading architectures[C]//Proc.of International Parallel and Distributed Processing Symposium:IEEE Press,2004.
[8] Michael Calonder,Vincent Lepetit.BRIEF:binary robust independent elementary features[C].11th European Conference on Computer Vision:Springer Berlin Heidelberg,2010.
[9] Gui Yang,Li Lichun.A new method of sea - sky - line detection based on region variance and RANSAC Algorithm[J].Laser& Infrared,2008,38(11):1149 - 1151.(in Chinese)桂阳,李立春.基于区域方差和RANSAC的海天线检测新方法[J].激光与红外,2008,38(11):1149 -1151.
