具有最优模型传递矩阵的交互式多模型算法
2014-06-24周卫东蔡佳楠
周卫东,蔡佳楠,孙 龙
(哈尔滨工程大学自动化学院,150001哈尔滨)
具有最优模型传递矩阵的交互式多模型算法
周卫东,蔡佳楠,孙 龙
(哈尔滨工程大学自动化学院,150001哈尔滨)
在传统的交互式多模型(IMM,interacting multiple model)算法中,描述模型马尔科夫切换过程的模型传递矩阵被定义成一个常值矩阵,并且将子滤波器间的相关性信息遗漏.然而,由于实际环境的复杂性,传统的IMM算法无法满足飞行器跟踪的需求.为此,提出一种具有最优模型传递矩阵的交互式多模型(OMTM-IMM,optimal mode transition matrix IMM)算法,该算法在考虑子滤波器相关性的前提下,以线性最小方差理论为基础,推导出最优的模型传递矩阵,该传递矩阵更加符合实际情况,理论分析和仿真实验表明该算法有效地提高了飞行器跟踪精度.
交互式多模型算法;常值模型传递矩阵;最优模型传递矩阵;线性最小方差理论;相关性
目标跟踪既涉及连续状态的估计问题,又涉及多个模型间的协调问题.文献[1]提出了交互式多模型(interacting multiple model,IMM)算法,由于在复杂性和估计精度方面良好的折中,该算法被广泛应用到很多领域[2-4].为进一步提高IMM算法跟踪能力,出现许多改进的IMM算法,如交互式有偏多模型算法(interacting multiple bias model,IMBM)、变结构交互式多模型算法(variablestructureinteractingmultiplemodel, VSIMM)等[5-12].
这些IMM算法中都存在两个共同的问题:
1)在描述模型马尔科夫切换过程采用的是一个常值的模型传递矩阵.该传递矩阵是由每个模型的逗留时间决定的,而非由连续的状态所决定[8].这会涉及模型数量大于2时模型传递矩阵的非对角线元素不唯一和如何确定逗留时间的难题[13].
2)子滤波器的相关性信息被遗漏.由于每一个子滤波器的交互初值是由所有子滤波器交互得到,因此每一个子滤波器的状态估计即取决于自身,又取决于其他子滤波器.那么子滤波器之间是存在相关性的,特别是对于复杂环境下目标跟踪问题,相关性信息不可忽略[14-17].
为解决以上问题,本文给出了一种具有最优模型传递矩阵的交互式多模型(optimal mode transition matrix IMM,OMTM⁃IMM)算法.该算法在考虑子滤波器相关性的基础上,以线性最小方差理论为基础,推导得到最优模型传递矩阵.通过理论证明和仿真实验表明,该算法能够更好地适应实际应用的需求,提高目标跟踪精度.
1 问题描述
飞行器目标跟踪系统可以用如下方程描述:

式中:χ(k)为a维的状态向量;z(k)为b维量测向量;mk为系统模型编号,指示出在k时刻与当前运动相匹配的模型,mk∈N,N={1,2,…,n}为模型数目;w(k-1,mk)和v(k,mk)为互不相关的高斯白噪声,方差为Q(k-1,mk)和R(k,mk);令Fj,Hj,Qj,Rj分别代表当mk=j时的状态矩阵F(k|k-1,mk),量测矩阵H(k,mk),Q(k-1,mk),R(k,mk).
在传统的IMM算法中,描述模型马尔科夫切换过程的模型传递矩阵是一个常值矩阵π,模型概率πij为其元素,被定义为:
式中:0≤πij≤1,∀i,j∈N;πi为第i个模型的逗留时间,E[πi]为πi的期望值,πii表示从模型i到模型i的传递概率.
由式(4)可知,当用于目标跟踪的模型数目n≤2时,可以计算得到唯一的πij;但当模型数目因此n>2时,通过式(4)、(5)只能得到在没有额外约束条件时,无法获得唯一的π[13].由式(5)可知,πii仅仅依赖于E[πi],与连续的系统状态无关[8],因此,计算模型传递矩阵的前提是E[πi]已知.
除此之外,IMM算法的第一步骤是计算交互初值和对应的方差阵[7],如式(6)、(7)所示.

以上分析发现传统IMM存在两个问题:
1)常值的模型传递矩阵仅依赖于逗留时间,而逗留时间无法事先预知,同时当模型数目大于2并且没有额外的约束条件时,模型传递矩阵不唯一.
2)子滤波器相关性信息被遗漏.
2 改进的交互式多模型算法
2.1 最优的模型传递矩阵
令模型传递概率为πij(k-1),交互概率为μi|j(k-1),模型概率为μj(k-1),维数均为1×1;^χj(k-1)为第j个子滤波器的状态向量χj(k-1)的估计值,^χ0j(k-1)为交互初值χ0j(k-1)的估计值,理想条件下,χ0j(k-1)即为状态的真实值χ(k-1).交互初值的误差和第j个子滤波器的状态估计误差分别定义为:

在线性最小方差理论下,最优交互初值为:
交互概率满足如下表达式:

根据式(8)~(11)有

其中:
其中e=[11…1]T.
˜χ0j(k-1)的方差为

其中:
从式(15)可以看出,˜P0j(k-1)利用了所有的协方差信息.为得到最优的πij(k-1),将性能指标设定为

其中tr(·)表示对各个分块矩阵求迹.问题转化为在约束条件式(14)下,式(16)取得最小值时,可以得到最优的βj(k-1),从而解得最优的πij(k-1).令

则性能指标改写为

引入拉格朗日算子λ,构建辅助函数f:

令
可得矩阵方程组

显然,B(k-1)是一正定矩阵,则eTB-1(k-1),那么性能指标函数的最优解为

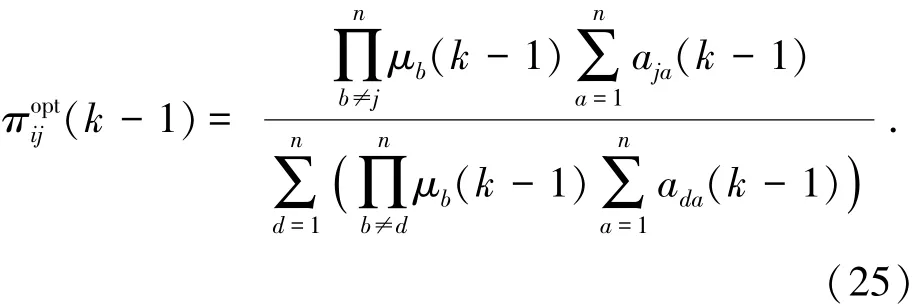
由文献[7]可知解得最优的πij(k-1)为
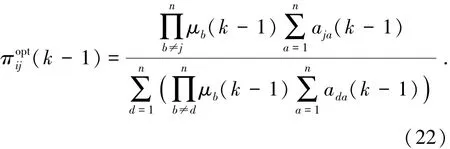
其中:B-1(k-1)=A(k-1);
将式(21)代入式(15),最小的交互误差方差阵:


2.2 OMTM⁃IMM算法
利用上一节中推导得到的最优模型传递矩阵,则改进后的OMTM⁃IMM算法步骤为:
Step 1 最优模型传递矩阵更新

其中
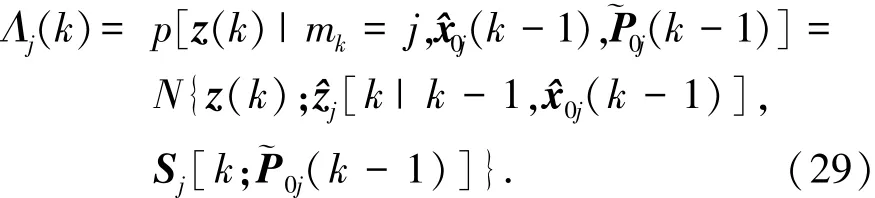
Step 3 模型滤波.将^χ0j(k-1)和˜P0j(k-1)作为子滤波器的输入,利用z(k)使子滤波器输出估计值^χj(k)和方差˜Pjj(k),并计算似然函数为
Step 4 模型概率更新
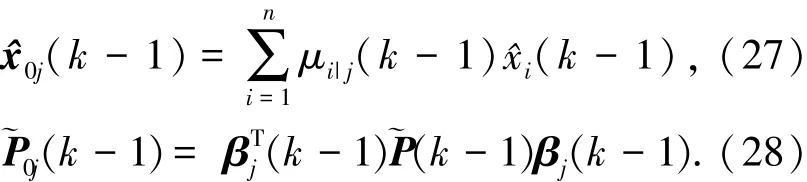
Step 5 输出交互
OMTM⁃IMM算法在每个滤波循环过程中增加了模型传递矩阵的计算步骤,并且在步骤2中交互初值方差阵利用了所有子滤波器间的协方差信息.与传统的IMM相比,该算法更多依赖于连续状态的估计值充分利用更多有用信息.
3 算法精度分析
3.1 子滤波器精度分析
对于子滤波器j,定义状态预测误差、状态估计误差和交互初值误差分别为:
因此

假设˜χj(k)与vj(k)不相关,则˜χj(k)的方差为
依据文献[18],上式改写为
由式(36)、(37)可得:
根据式(24),比较式(38)、(39),则

上式表明在最优的模型传递矩阵下所有的子滤波器的估计精度都有所提高.
3.2 OMTM⁃IMM算法精度分析
定义量测z的生成子空间为L(z),OMTM⁃IMM算法得到的状态估计值为,其生成子空间为,误差方差阵为POMTM-IMM;同时IMM算法的状态估计值为,生成子空间为,误差方差阵为PIMM.那么为的集合(θ=OMTM-IMM,IMM).
在传统的IMM算法中πij(k-1)为常值;交互初值的方差阵为式(7).在OMTM-IMM算法中,πij(k-1)为变量;交互初值的方差阵为式(27),其中包含了所有子滤波器的相关性信息.因此传统的IMM算法是OMTM-IMM算法的特例,那么

4 仿 真
考虑两个飞行器的目标跟踪实验.实验A中逗留时间τi为已知,实验B中τi为未知.为简化实验,这里只考虑水平方向的运动,则状态X=[PχVχPyVy]T分别为χ轴方向位置和速度、y轴方向的位置和速度.描述飞行器运动状态的模型包括常速运动模型(constant velocity motion,CV)、常速左转弯运动模型(left constant turn motion,LCT)和常速右转弯运动模型(right constant turn motion,RCT),分别描述为
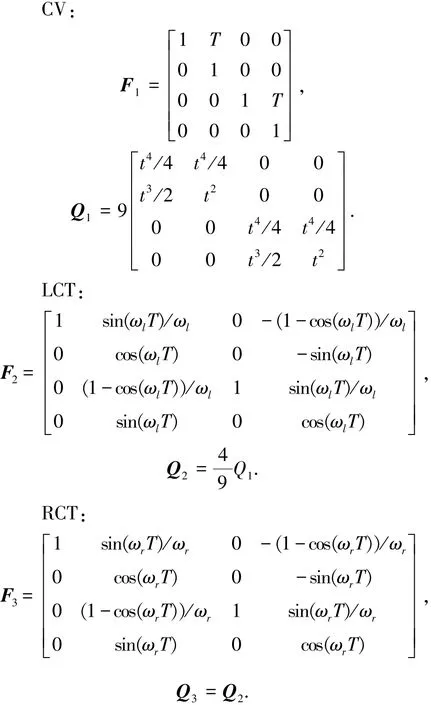
其中:T=1 s;t=0.1;ωl=2π/180;ωr=-2π/180.
实验A 飞行器的运动规律为CV-LCTRCT,每个运动状态的逗留时间均为100 s,即τ1=τ2=τ3=100 s.并假设模型传递矩阵每一行中的非对角线元素相等,那么,传统IMM算法的模型传递矩阵为
OMTM-IMM算法的模型传递矩阵由式(22)计算得到.其中位置误差δP=速度误差δV=和为飞行器真实的位置和速度.蒙特卡洛实验100次结果如图1~3所示.
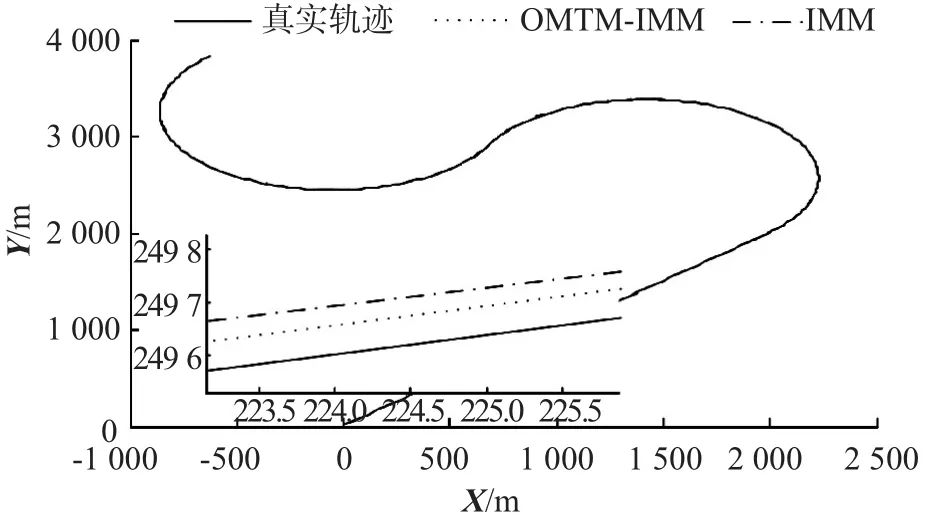
图1 实验A跟踪轨迹
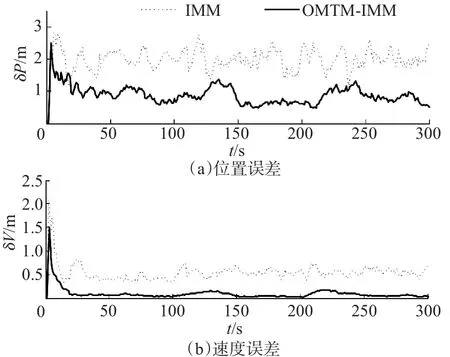
图2 实验A位置误差和速度误差
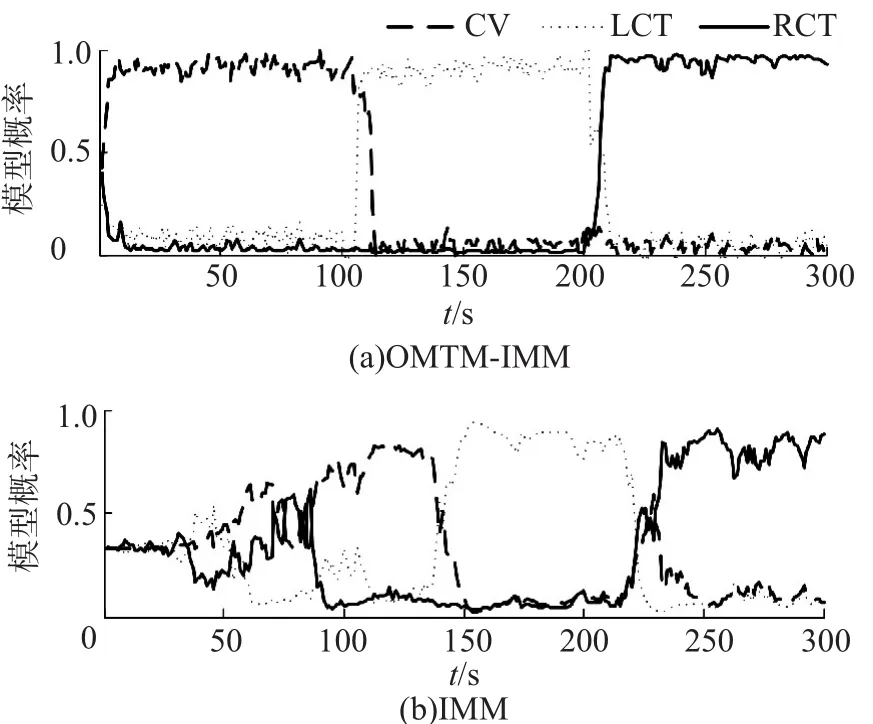
图3 实验A模型概率
在t=100 s和t=200 s时,飞行器运动状态发生变化.图1为两种算法对真实轨迹的跟踪图,结合图1中的局部放大图和图2表明,OMTMIMM算法的估计误差明显小于IMM算法.图3显示,OMTM-IMM算法在每一个运动状态下,对应模型的模型概率更接近于1,并且在状态切换过程中存在较小的时间延迟.因此,在此实验条件下,OMTM-IMM算法具有更强的跟踪能力,主要原因是该算法应用了全部的协方差信息,避免了信息的遗漏.
实验B:飞行器的运动规律和逗留时间均未知,此时传统的IMM算法无法计算得到模型传递概率.因此,在此假设模型传递概率与实验A中的一致.蒙特卡洛实验100次结果如图4~6所示.
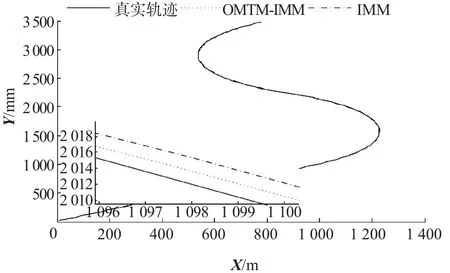
图4 实验B跟踪轨迹
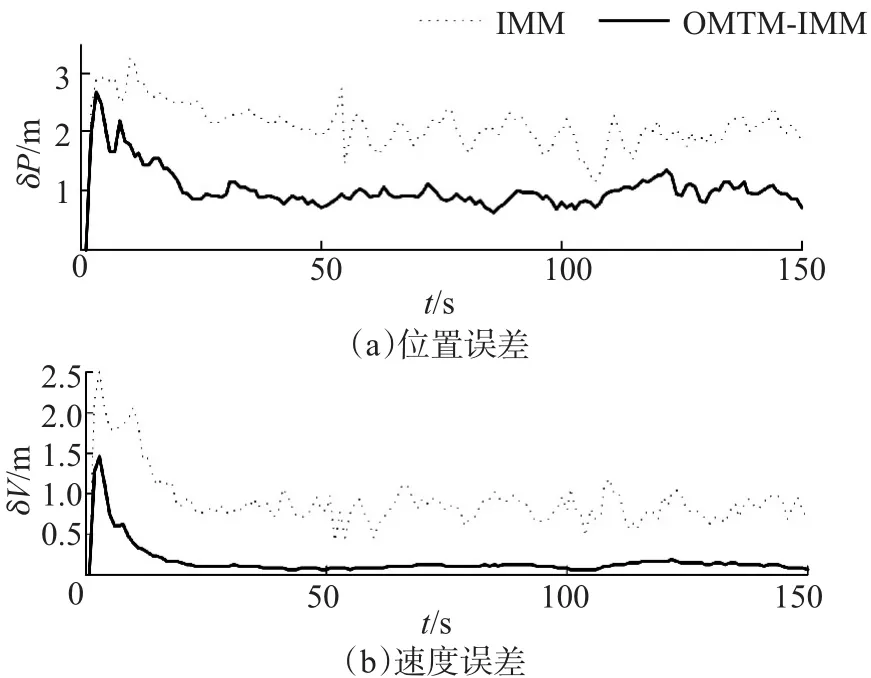
图5 实验B位置误差和速度误差
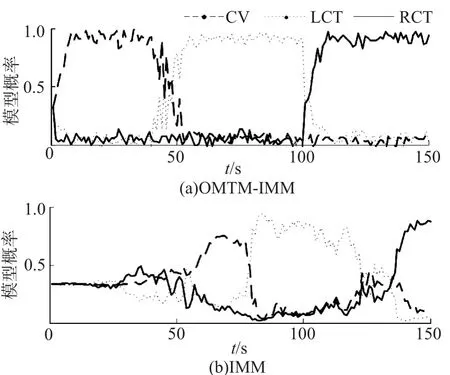
图6 实验B模型概率
图4 、5表明,OMTM-IMM算法的估计精度仍然高于IMM算法.图6显示,IMM算法的模型概率已经不能准确描述当前的运动状态,并且存在严重的滞后,OMTM-IMM算法仍能够准确的跟踪飞行器的运动变化情况.主要的原因是IMM算法的模型传递矩阵不准确,而OMTM-IMM算法的模型传递矩阵是由连续状态估计值进行实时计算的,能够较准确地描述当前的运动状态.
5 结 论
基于线性最小方差理论,推导了最优的模型传递矩阵,以及对应的交互初值误差矩阵,从而提出了OMTM-IMM算法.该算法利用了所有的子滤波器相关性信息,并且能够实时准确地跟踪模型切换情况,进而提高了飞行器目标跟踪的估计精度.理论分析和仿真实验都印证了这一结论.
除了在本文条件下得到的OMTM-IMM算法以外,还可以考虑如下两种情况:
1)πij(k-1)维数为1×1,将μj(k-1)扩展为n×n维矩阵,模型概率可以区分每一维状态对系统的影响.此时算法的估计精度较OMTM-IMM算法提高,但计算量变大.
2)将πij(k-1)和μj(k-1)均扩展为n×n维矩阵,模型传递矩阵和模型概率都可以区分每一维状态对系统的影响.此时算法的估计精度最高,但计算量最大.
[1]BLOM H A P.An efficient filter for abruptly changing systems[C]//Proceedings of the 23rd IEEE Conference on Decision and Control.Las Vegas:NV,1984:656-658.
[2]MAZOR E,AVERBUCH A,BAR⁃SHALOM Y,et al. Interacting multiple model methods in target tracking:a survey[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):103-123.
[3]QU H Q,PANG L P,LI S H.A novel interacting multiple model algorithm[J].Signal Process,2009,89(11):2171-2177.
[4]GAO L,XING J P,MA Z L,et al.Improved IMM algorithm for nonlinear maneuvering target tracking[J]. Procedia Engineering,2012,29(1):4117-4123.
[5]BLAIR W D,WATSON G A.Interacting multiple bias modelalgorithmwithapplicationtotracking maneuvering targets[C]//Proceedings of the 31st Conference on Decision and Control.Tucson:AZ,1992:3790-3795.
[6]LI X R,BAR⁃SHALOM Y.Mode⁃set adaptation in multiple⁃model estimators for hybrid systems[C]//Proceedings of the 1992 American Control Conference. Chicago:IL,1992:1794-1799.
[7]BAR⁃SHALOM Y,LI X R,KIRUBARAJAN T. Estimation with Applications to Tracking and Navigation[M]//New York:John Wiley&Sons,2001.
[8]LI X R,BAR⁃SHALOM Y.Multiple⁃model estimation with variable structure[J].IEEE Transactions on Automatic Control,1996,41(4):478-493.
[9]FU X,JIA Y,DU J,et al.New interacting multiple model algorithms for the tracking of the maneuvering target[J].IET Control Theory and Applications,2010,4(10):2184-2194.
[10]JOHNSTON L A,KRISHNAMURTHY V.An improvement to the interacting multiple model(IMM)algorithm[J]. IEEETransactionsonAerospaceandElectronic Systems,2001,49(12):2909-2923.
[11]YUAN T,BAR⁃SHALOM Y,WILLETT P,et al.A multiple IMM estimation approach with unbiased mixing for thrusting projectiles[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(4):3250-3267.
[12]SEAH C E,HWANG I.Algorithm for performance analysis of the IMM algorithm[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):1114-1124.
[13]BLOOMER L,GRAY J E.Are more models better?The effect of the model transition matrix on the IMM filter[C]//Proceedings of the 34th Southeastern Symposium on System Theory.Huntsville:IEEE,2002:20-25.
[14]SEAH C E,HWANG I.State estimation for stochastic linear hybrid systems with continuous⁃state⁃dependent transitions:an IMM approach[J].IEEE Transactions on Aerospace and Electronic Systems,2009,45(1):376-392.
[15]HOFBAUR M,WILLIAMS B.Mode estimation of probabilistic hybrid systems[C]//Proceedings of Hybrid Systems:Computation and Control.Stanford:CA,2002:253-266.
[16]BLOM H,BLOEM E.Exact Bayesian and particle filteringofstochastichybridsystems[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(1):55-70.
[17]KOUTSOUKOS X,KURIEN J,ZHAO F.Monitoring and diagnosis of hybrid systems using particle filtering method[C]//Proceedings of the 15th International Symposium on Mathematical Theory of Networks and Systems.Notre Dame:IN,2002:1-15.
[18]SIMON D.Optimal State Estimation[M]//New York:John Wiley&Sons,2006.
(编辑 苗秀芝)
Interacting multiple model algorithm with optimal mode transition matrix
ZHOU Weidong,CAI Jianan,SUN Long
(College of Automation,Harbin Engineering University,150001 Harbin,China)
The traditional interacting multiple model(IMM)algorithm usually models the mode evolutions as Markov processes with constant mode transition matrix and leaves the correlative information among sub⁃filters out.However,because of the complexity of the practical application,the traditional IMM algorithm is unsuitable in aircraft tracking.To solve these problems,an optimal mode transition matrix IMM algorithm(OMTM⁃IMM)is presented.The new algorithm uses the linear minimum variance theory to calculate the optimal mode transition matrix according to the correlations between sub⁃filters.In this case,the new matrix further approaches the truth one,and the estimation accuracy can be improved.This conclusion can be support by the following theoretical derivation and simulations in aircraft tracking.
IMM;constant mode transition matrix;adaptable mode transition matrix;linear minimum variance theory;correlation
U666.12
:A
:0367-6234(2014)11-0101-06
2013-12-30.
国家自然科学基金(61374208).
周卫东(1966—),男,教授,博士生导师.
蔡佳楠,happycaijianan@163.com.