基于GPS和INS的测速方法比较分析
2014-06-24仇立成
仇立成
(济南市勘察测绘研究院,山东济南 250013)
基于GPS和INS的测速方法比较分析
仇立成∗
(济南市勘察测绘研究院,山东济南 250013)
目前常用的测速方法包括测速仪、GPS多普勒观测值测速、INS测速、GPS/INS测速等。文章分析了GPS多普勒测速,INS测速以及GPS/INS测速的基本原理。最后,通过对实测的车载实验数据解算对以上这三种方法进行了详细的比较分析,得出了一些比较有意义的结论。
多普勒测速;GPS/INS;INS测速
1 引 言
随着GPS的普及和应用,它的优势在社会各方面都有明显的体现,在测量运载体的速度方面也是如此[1]。虽然其使用方便,但是一旦GPS卫星信号失锁,将导致多普勒观测值不能够得到,所以这也是多普勒测速的一大缺点,而GPS/INS的组合测速方式的出现打破了这一弊端,它可以在信号失锁的情况下利用INS的测量值来准确测量速度,而且当卫星信号可用时,GPS和INS两种系统的测量值可以通过数据融合更精确的测量载体速度[2]。
由于以上三种方法的观测量不尽相同,而且数学计算思路也不同,所以他们求得的载体的速度的精度也会有所差别。本文将对这三种方法进行分析、比较,讨论他们之间的联系或区别。
2 几种测速方法的介绍
2.1 多普勒观测值测速
GPS接收机与卫星之间的相对运动产生多普勒效应,使得接收机接受到的GPS信号与卫星发射的原始载波信号频率不一样,两者之差成为多普勒频移。由多普勒效应理论可推导如下公式[3]:

式中,̇ρ为接收机与卫星之间的距离变化率,c为光速,f为频率,df为多普勒频移。目前许多接收机都能提供多普勒观测值,则可以利用此公式原理测定载体速度。
在实际GPS数据处理过程中,伪距观测方程如下:

对上式求微分并对时间取极限,伪距的时间变化率:

代入线性化后的伪距观测方程,可得:


2.2 INS测速
惯性导航系统(INS)作为一种独立的导航定位系统,主要是通过其内部的加速度计提供实时加速度信息,并通过下面的数学积分最后求得载体的速度。下面我们给出了INS计算并实时更新载体速度的数学算法[4],其参考坐标系为东、北、天导航坐标系:
式中,vn(tk)为tk时刻的载体速度,为由载体坐标系至导航坐标系的姿态转换矩阵,△θ(tk)为相邻两个时刻陀螺仪测出的角度增量,△(tk)为有害加速度引起的速度补偿量。
2.3 GPS/INS组合测速
此种方法是综合利用GPS的测量值和INS的测量值,通过卡尔曼滤波的方法将其融合,实现他们之间的优势互补。因为GPS卫星信号一旦失锁,就无法测速,所以测量存在不连续性,而INS可以独立的给出连续的测量值。于是采用这两种方法的组合,可以互相利用各自优势,获得更好的测量值。下面给出卡尔曼滤波的基本方程[5]:

XK是K时刻的系统状态矢量;
ΦK,K-1是K-1时刻的系统转移矩阵;
WK-1是K-1时刻的系统噪声矢量;
ΓK-1表示系统噪声驱动矩阵;
ZK表示K时刻的量测矢量;
HK表示K时刻的量测矩阵;
VK表示K时刻的量测噪声;
其中,WK-1和VK互不相关。
方程中的状态参数包括:位置误差、速度误差、姿态误差、陀螺仪常值漂移、加速度计零偏共15维;
具体可见式(8):

上式中,X表示状态向量,位置误差δp,速度误差δv,姿态误差δφ,陀螺仪随机漂移δd,加速度计随机漂移δb。wa为加速度计常值零偏白噪声,包含有重力异常计算误差,wg为陀螺漂移白噪声,wb为加速度计随机零偏白噪声,wd为一阶马尔柯夫过程漂移白噪声。
量测方程由GPS测得的位置和速度与INS测得的位置和速度分别作差得到,即[6]:
然后即可按照标准卡尔曼滤波计算公式进行状态最优估计[5]。
3 车载实测实验及结果比较分析
数据采集的主要设备包括:SPAN FSAS分体式组合导航定位系统、实验车、便携式电脑以及连接设备等。SPAN FSAS分体式组合导航定位系统,主要由高性能的GPS和IMU两套组件组成,是NovAtel公司和KVH公司联合推出的一个商业级GPS/INS一体化系统(SPAN)。加速度计的性能指标如表1所示:
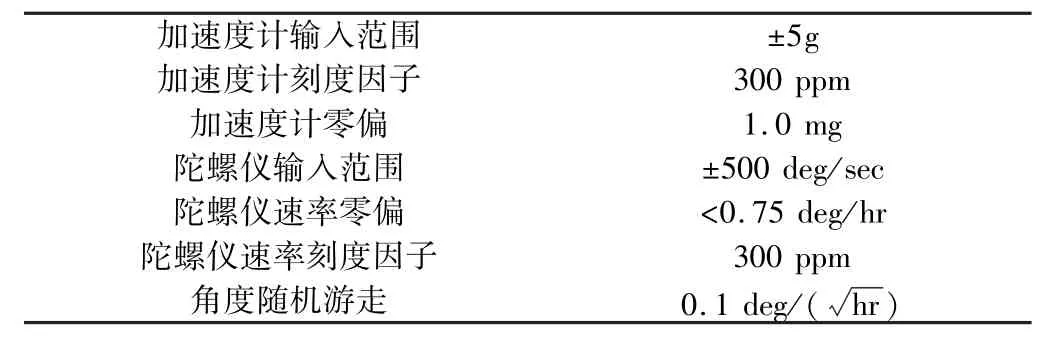
表1 仪器性能指标
在卡尔曼滤波方程中,量测噪声模型遵循一阶高斯-马尔科夫模型。方差的设置如表2所示:
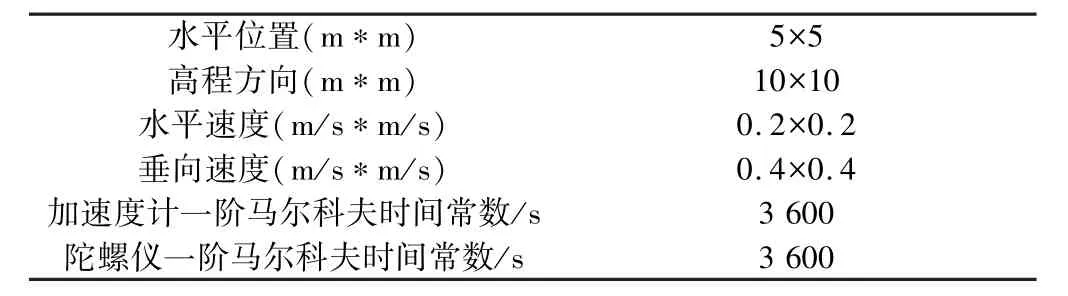
>表2 量测噪声方差
本次试验采用了试验车采集的1 h的数据进行分析,并将最后计算得到的速度与本次测量系统自带的高精度数据结算软件IE的结果相比较,得到三种不同方法下的误差曲线。由于篇幅所限,分别给出具有代表性的北向位置的误差曲线如图1~图3所示。
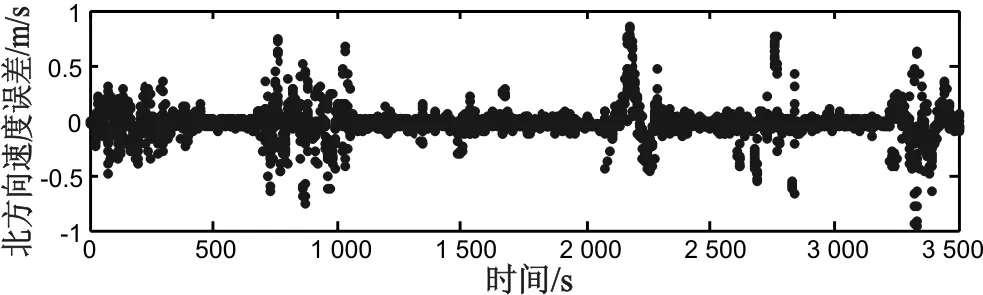
图1 GPS测速误差
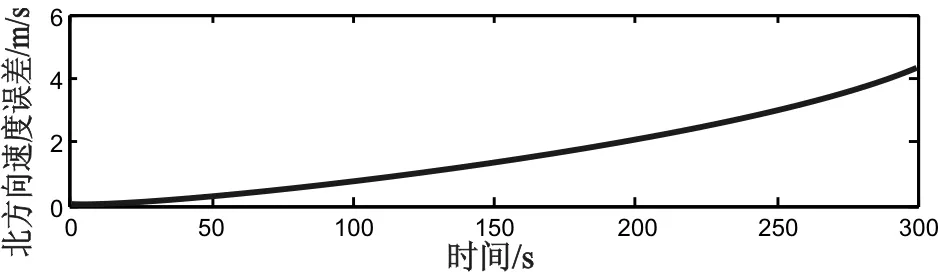
图2 INS测速误差
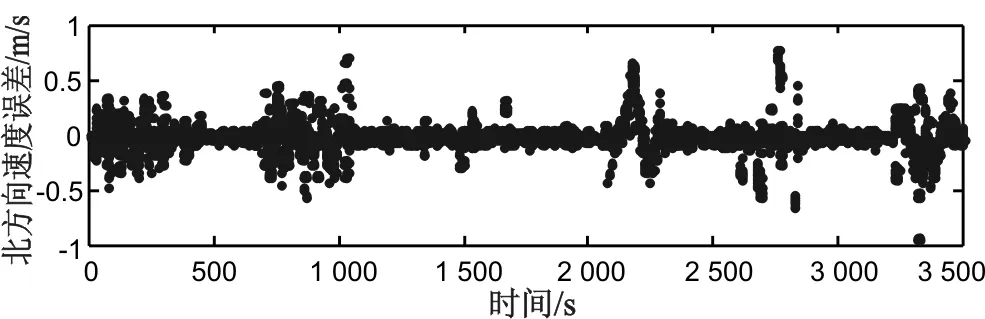
图3 GPS/INS组合测速误差
从以上三种方法的测速误差曲线中,我们可以看出GPS测速相对稳定,误差不会积累,而INS在5 min时就已经达到近5 m/s的偏差,已经发散。下面我们可以通过计算1 h内的全部数据得到GPS测速和GPS/INS组合测速的均方根误差:

表3 两种测速方法精度比较
通过比较分析,我们可以得到以下结论:
(1)单纯的INS测速受惯性器件的影响,尤其是精度较低的惯性器件,测速误差会随时间快速的积累,对于长时间的测速来说失去意义,仅适用较短时间内的测速,然而INS可以给出连续性的速度测量值。
(2)GPS测速的优势是使用较为方便,且测速误差不会随时间积累,但是受到接收卫星信号的质量的影响,比如卫星几何结构较差或者出现卫星信号失锁的情况,甚至接收不到四颗以上卫星,这样测速就存在不连续性,比如在上图中的600 s~1 000 s和2 000 s~2 300 s。
(3)GPS/INS组合测速分别克服了单纯使用GPS和INS测速的缺点,使整个测速过程保持连续,而且测速误差不会随时间积累,主要是通过GPS的测量值反馈校正INS的测量值,使整个系统得以综合利用优点,克服各自缺点,使测速精度也有一定提高。
4 结 论
单纯的INS速度测量以及GPS速度测量都有着各自的缺点,在此基础上本文讨论了GPS/INS组合测速的优势,并通过实测数据证明比单纯的INS或GPS测速有着非常好的优势。如果想要再提高组合测速的精度,首先需要提高惯性器件的精度,然后需要在组合方式以及数据融合理论上进行改进。
[1] 周泽波,沈云中,李博峰.GPS/Doppler导航随机模型的移动窗口实时估计算法[J].测绘学报,2011,40(2):220~225.
[2] Zhou Z.,Li B.and Shen Y.A window-recursive approach for GNSSkinematicnavigationusingpseudorangeand Doppler measurements[J].The Journal of Navigation,2013, 66(2):295~313.
[3] 徐绍铨,张华海,杨志强等.GPS测量原理及应用[M].武汉:武汉大学出版社,2008.
[4] 秦永元.惯性导航[M].北京:科学出版社,2005.
[5] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998.
[6] 张国良,曾静.组合导航原理与技术[M].西安:西安交通大学出版社,2008.
Comparison and analysis of Velocity Measurement Based on GPS and INS
Qiu Licheng
(Ji′nan Institute of Surveying and Mapping Survey,Ji′nan 250013,China)
The current measurement methods commonly used include velocimetry,GPS Doppler observations,INS speed,GPS/INS speed speed etc..This paper analyzes GPS Doppler velocity measurement,INS measurement and the basic principle of GPS/INS speed.Finally,through the experimental dataon the measured solution to these three kinds of methods are analyzed comparatively,get some meaningful conclusions.
doppler;GPS/INS;INS velocity measurement
2014—02—09
仇立成(1987—),男,助理工程师,从事城市测绘技术工作。
