新体制雷达—分布式孔径相参合成雷达
2014-06-23张亚婷黄志忠
张亚婷 黄志忠
(西安电子工程研究所 西安 710100)
0 引言
未来反隐身、防空反导武器系统都对预警探测雷达的探测威力提出了更高的要求,这就使雷达要有更大的功率孔径乘积。雷达的灵敏度与天线孔径的平方成正比,但当天线尺寸增大时,雷达的机动灵活性将很受影响,因为大孔径系统本来就非常昂贵且不容易运输[1],巨型相控阵雷达的研制道路行不通,所以就需要下一代新体制雷达。下一代新体制雷达应该满足雷达既要具有较高的灵敏度、远距离搜索、跟踪和识别能力,同时还要便于运输,于是出现了由几部较小雷达组成的分布式孔径相参合成新体制雷达系统。该雷达系统使用大量分散而不是共置的协同工作的小孔径,通过空间相参合成可以达到单个大孔径的性能。该雷达作为下一代雷达的发展方向,不仅仅是单点的技术应用或创新,涉及面较广。分布式孔径相参合成雷达是继MIMO雷达之后的又一种新体制雷达。

图1 分布式孔径相参合成雷达示意图
1 分布式孔径相参合成雷达的基本概念和组成
分布式孔径相参合成雷达系统按照标准积木式相干结合多个分布雷达孔径,也就是说使用大量分散而不是共置的协同工作的小孔径,当小孔径相参合成在一起时可以达到单个大孔径的性能,继而获得雷达的高灵敏度和机动性。
分布式孔径相参合成雷达系统包含N部可车载机动的单元雷达和一个中心控制处理系统,其组成见图1。这些单元雷达按一定方式布局,波束指向相同区域,等效形成一个大威力的机动式雷达。所有单元雷达通过中心控制处理系统进行信号级合成处理,实现信号级相参合成,实现N3信噪比增益,从而提高探测威力、测量精度和识别能力。
2 分布式孔径相参合成雷达与MIMO、双(多)基地、组网雷达的区别[2-6]
分布式孔径相参合成雷达中的每个单元均是一部完整的雷达,除了受控于中心系统进行联合工作外,也可自行独立工作探测不同区域,工作模式灵活,功能扩展方便。作为一种新体制雷达,分布式孔径相参合成雷达与MIMO雷达、双(多)基地雷达、组网雷达不同。
分布式孔径相参合成雷达的最大特点,就是其性能优于MIMO雷达(MIMO雷达只能获得N2信噪比增益),其研制难度也高于MIMO雷达,因为MIMO雷达侧重于视频处理,而分布式孔径相参合成雷达侧重在射频处理。分布式孔径相参合成雷达的接收相参模式仅在正交波形收发处理这点上类似MIMO雷达,但不是MIMO雷达,这只是为实现收发相参的一个瞬态过渡阶段,最终目标是在空间实现发射相参。
MIMO由多个发射阵元和多个接收阵元组成,发射端发射正交波形,接收端通过匹配滤波器组将不同发射信号对应的回波分离,并进行集中处理,可同时形成对目标的多个观测通道,它是近年由通信领域引入的全新雷达体制。MIMO雷达根据各天线间距的“远近”又可分为统计MIMO雷达和相参MIMO雷达两大类,相参MIMO雷达的提出源于稀布阵综合脉冲孔径雷达(SIAR)。即当目标相对于各天线的视线角可近似相等时为相参MIMO雷达,反之目标相对于各天线的视线角明显不同时则为统计MIMO雷达。
(双)多基地雷达系统是指使用两个或多个相距颇远的基地,其中一个放置发射机,两个或者多个具有公共覆盖空域的接收基地,目标检测时发射能量照射目标,接收检测和处理目标回波,并且每个基地的目标数据在一个中心站融合。它们通常是将来自每个基地的数据用相参的方式进行融合以形成大的孔径。多部发射机也可置于单独的基地或和接收机放在同一个基地。
组网雷达是指通过将多部不同体制、不同频段、不同工作模式、不同极化方式的雷达或者无源侦察装备适当交错布站,借助于通信手段链接成网,由中心站统一调配而形成的一个有机整体,形成一种静态部署与动态部署相结合,前沿部署与纵深部署相衔接,有源探测和无源探测并存的有效综合性探测网。网内各雷达和雷达对抗侦察装备的目标点迹、航迹等信息由中心站收集,综合处理后形成雷达网覆盖范围内的情报信息,并按照战争态势的变化自适应的调整网内各雷达装备的工作状态,发挥各个雷达和雷达对抗侦察装备的优势,从而完成整个覆盖范围内的探测定位和跟踪等任务。
3 分布式孔径相参合成雷达的优越性及其设计原则
3.1 分布式孔径相参合成雷达的优越性
分布式孔径相参合成雷达体制新颖,具有快速移动、机动部署、灵活使用等很多潜在优势[1,7-8],具体表现在:
a.密集分布相参雷达是多个雷达单元的拼接,完全可以当一部雷达那样工作,包括波束控制、波束形成、目标跟踪等,只不过需要采用一个基准时钟源并采用集中控制;密集分布与分散分布二者之间具有良好继承性,一旦技术难题得到破解,便可很快改成分散分布工作模式;
b.机动部署灵活、生存力强、易于维护:每个雷达单元均具有良好的机动性,可以机动部署,快速移动,而且其配置方式也可变化,既可集中配置也可前置分开配置,既能要地部署,也可前沿部署,及时变化阵地,增强重要方向的作战能力,因而使用十分灵活;
c.能获得极高的角度分辨率,识别能力强,且具有优良的可扩展性。该雷达系统可实现很高的角度分辨力,可与导引头的角度分辨力匹配,同时可高精度测角,实现高精度测轨;该雷达系统易实现大扫描角宽带目标成像,大范围识别能力强;
d.更好的实现性和更高的可靠性:单元雷达规模小,技术成熟,工程实现性好。另外多部雷达分布联合工作,即使一部雷达失效,不会给系统造成很大影响,系统仍可运行,雷达的功能和威力理论上可以通过增加雷达单元数量任意扩展。
3.2 设计分布式孔径相参合成雷达应考虑的问题[9-10]
分布式孔径相参合成雷达是由多个雷达单元集成的新体制雷达。其中各雷达单元的设计很重要,应考虑以下几方面的问题:
a.在保证机动性的前提下,雷达系统应尽可能大,因为分布式雷达系统要求雷达单元具备独立搜索、检测并跟踪目标的能力。规模太小显然达不到独立工作的要求;
b.单元雷达工作模式的设计,当单元雷达发射正交波形时,只能实现接收相参,发射相同波形时才能实现发射相参。系统要能实现孔径相差,工作模式需要切换过渡,因此各单元雷达必须具有发射不同波形的能力;
c.雷达单元工作频段选择,满足机动性要求,工作频段不能太高,雷达工作频段越高(如X波段)参数估计和控制精度等要求越高,相参合成的难度也越大,所以工作频率选择应该详细论证;
d.单元雷达的系统设计差异,会导致合成信号的差异,直接影响合成信噪比增益,因此单元雷达的相参合成工作模式的系统设计应尽可能保持一致。
4 分布式孔径相参合成雷达的工作模式及工作过程
4.1 工作模式
分布式孔径相参合成雷达采用正交波形和多输入多输出(MIMO)技术以实现相参接收和相参发射的参数估计。在接收相参模式,对接收到的正交波形相参合成,得到了N2倍(相对于单部雷达)的信噪比增益。在发射相参模式,各单元雷达发射相同的波形,而且每个发射脉冲的相位和发射时间都要自适应调节以使所发射的脉冲同时到达目标,且相位相同。当发射和接收都实现相参时,系统可以获得N3倍的 SNR 增益[1,8,11-12]。
分布式相参合成孔径雷达的工作模式具体到3种形式:
a.独立工作模式
每个单元雷达可独立工作,进行目标搜索、检测、跟踪。
b.接收相参模式
各单元雷达发射彼此正交波形,波形设计类似于MIMO雷达,在接收端通过通道分离和匹配滤波实现接收相参,对目标的距离和角度进行估计,获取发射相参时所需的各单元延时和相位信息,该过程不是一种独立的工作模式,只是实现发射相参的中间过度过程。
c.收发全相参模式
利用接收相参模式估计的时延和相位参数,对单元雷达的延时与相位进行精确补偿控制,使它们能够同时到达目标同时具有相同的相位,各单元辐射的能量在目标处实现相参合成。实现收发全相参,获得N3倍的增益。这是分布式雷达所独有的常态化模式,是MIMO雷达所不具备和无法实现的。
4.2 工作过程[1,11]
图2中3部雷达都对公共视场内的目标测距。分布式孔径相参合成雷达具体的工作过程为:
a.首先系统处于接收相参模式,由外部信息源,如红外卫星或超远程预警雷达提供目标先验位置信息,雷达单元采用正交波形围绕指示位置搜索目标;或雷达主动在感兴趣的空域内进行目标搜索,目标在较远距离条件下,系统采用长时间积累模式检测直至发现目标。一旦获得稳定跟踪,就可以得到N2倍的增益;
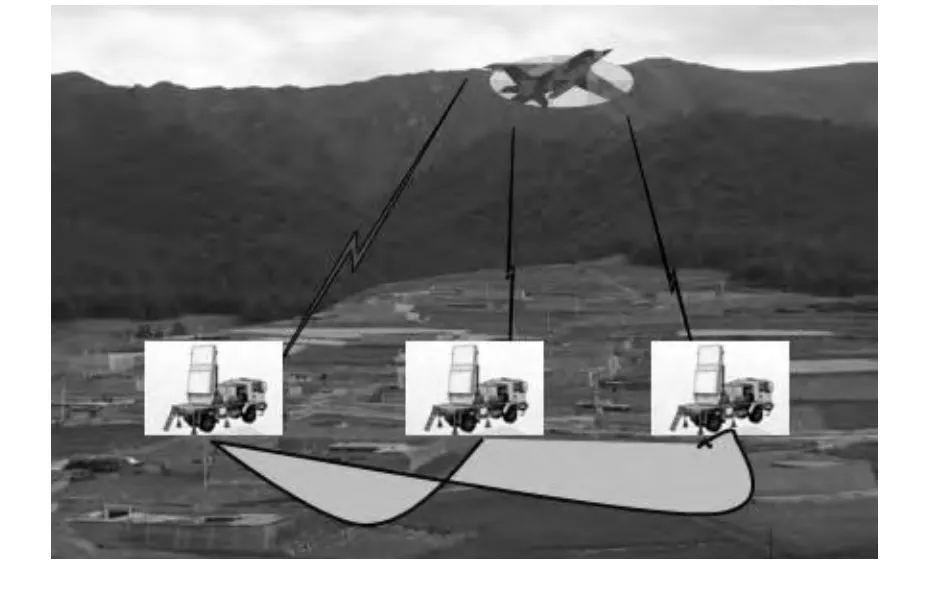
图2 分布式相参孔径雷达系统工作图
b.根据目标距离和角度信息,计算发射相参模式下各单元雷达所对应的延时和相位补偿量;各个雷达单元发射相同波形,并做适当延时和相位调整,使系统切换到发射相参模式。一旦系统进入全相参工作模式,获得N3倍信噪比增益,可以对该目标进行更远距离的精确跟踪;
c.若跟踪出现问题可退回接收相参状态重新进行参数估计。
5 分布式孔径相参合成雷达的现状与趋势[2,4,9-10]
2003年美国导弹防御局发起了一项研究,来自包括林肯实验室在内的多家研究实验室、工业部门和政府军方机构的众多研究者参与了这项工作,旨在研究能应对未来弹道导弹威胁的高级雷达传感器概念。林肯实验室从2000年左右就开始了分布式相参合成体制雷达技术的研究,进行了大量试验工作。先后研制了L波段室内分布式试验系统和X波段两单元分布式收发相参实时演示试验系统,完成了回波接收相参的原理演示;大约从2003年起开始研究分布式雷达在弹道导弹防御系统,目前已完成原理验证试验并获得成功,2004年4月成功完成了室内对模拟器目标的静态相参合成演示试验。
分布式孔径相参合成雷达技术在国内的研究还属于起步阶段,多家科研院所如北京无线电测量研究所、西安电子工程研究所、清华大学、西安电子科技大学、北京理工大学、成都电子科技大学已经关注该技术的潜在优势和应用前景,并开展了分布式孔径相参合成雷达先期的概念研究,取得初步研究成果,为分布式孔径相参合成雷达系统开展关键技术预研攻关和工程实现奠定了一定的基础。
航天二院二十三所已经利用相关资源,基于分布式关键技术理论研究和仿真分析,完成了相参合成原理和算法初步验证,依靠简易试验平台,分别完成了P波段雷达单发双收跟踪飞机试验和C波段典型双发双收平台室内模拟和标杆空馈相参合成试验。2012年,西安电子工程研究所在S波段固定分布式孔径相参合成雷达和MIMO雷达方面取得了技术突破,并在户县试验场完成了地面动目标观测试验。
分布式相参合成孔径雷达作为未来雷达的发展方向,特别是中远程反导武器制导雷达的发展方向,被称为下一代弹道导弹防御雷达。鉴于目前尚有若干问题需要深入研究,依然存在一定的风险。所以可以考虑采用密集分布的形式进行相参雷达实验,即雷达单元相同,雷达单元分布的距离不是在上百米以外,而是密集分布在一起。
6 分布式孔径相参合成雷达的关键技术
分布式孔径相参合成雷达涉及的面较广,是雷达的又一重要发展方向。然而,就系统的实现而言,相比于常规雷达,分布式孔径相参合成雷达首当其冲的技术难点就是各单元雷达之间的时间、空间和相位的同步。新体制、新技术带来好处的同时又提出了一些理论技术难点和挑战,如为获取分布式雷达的延时与相位相干参数的提取,需要为单元雷达发射正交波形的设计与处理技术,高精度时间同步与时钟源相参技术、延时与相位的估计技术、低信噪比高精度参数估计、分布式阵列稀疏测角等,都有待于全面而深入开展理论研究和技术开发[4.12-14]。
a.多单元雷达间信号的相对延时和相位估计是实现分布式相参合成的前提与核心,频段越高,参数估计和处理的难度越大。分布式雷达远距离截获时,面临“单个雷达看不见,合成以后可看见”的低信噪比参数估计环境情形,需要解决低信噪比条件下的高精度参数估计难题。
b.正交波形的产生与处理,单元雷达彼此之间需要发射正交波形,接收采用一组匹配滤波器,以便对本地与其它回波分别进行匹配处理,从而提取延时和相位等相干参数。正交波形的互相关函数理想条件下为零,即使两部雷达载频相同,也能互不影响地同时工作。正交波形主要有频率正交和相位编码正交两种。频率正交波形带宽窄,正交性好,多卜勒不灵敏。相位编码信号带宽宽,正交性较好,对多卜勒敏感,需要作多卜勒频率补偿。由于分布式雷达最终要用同频工作,因此最好选择相位编码正交波形。
c.以雷达微波脉冲输出端为衡量基准,可依次从同步方法、传输方式、路径误差、补偿模型、修正方法和监测方法等方面开展研究;同时,本振相参是确保分布式相参合成效率的基础支撑技术,可分阶段递进研究一个基准源与多个基准源的本振相参。频段越高,时间同步要求越高。
d.延时和相位相干参数的实时监测和闭环更新技术也尤为重要,因为延时和相位的一些估计算法包括:峰值算法、相关法、全极点模型等。当发射相同波形实现收发相参后,需要进行相参合成效果评估,如果合成效果不好,又需回到接收相参模式,更新延时和相位参数,然后再过渡到收发相参模式。
e.分布式布局的问题,要实现相参合成和检测概率要求,各单元雷达分布布局并非任意的。各单元雷达的布局结构直接影响合成的方向图,稀疏配置会带来栅瓣问题(频段越高,稀疏测角的难度越大),在多目标情况下,需要解决稀疏布阵的无模糊测角。需要解决的技术难题包括如何减弱栅瓣影响,如何构建高精度测角回路。
f.相参合成的理论模型的应用局限,在短基线配置情况下可以实现收发全相参,而长基线观测目标模式下,视角、RCS、多普勒频率、杂波等可能会不同,这些都会对多雷达合成带来诸多差异,能否实现收发全相参是一个值得研究和探讨的问题。更要关注相参合成的实际应用,若同时多波束检测多目标,会引起一些难以预料的问题,这都有待进一步地研究。
7 结束语
分布式孔径相参合成雷达是一种新体制雷达,具有很多潜在的优势,代表了雷达特别是远程制导雷达的发展方向。在研究分布式相参合成雷达时,面临如单元雷达间的时间延迟和相位延迟的高精度估计与补偿、栅瓣抑制和对高动态目标发射接收全相参合成的稳定维持、高精度时间同步与本振相参等关键技术问题,而这些还有待于全面而深入开展理论研究和技术开发。
[1]S.Coutts,K.Cuomo,et al,Distributed Coherent Aperture Measurements for Next Generation BMD Radar[C].IEEE.Radar conference.2006,390-393.
[2]Hugh Griffiths,Multistatic,MIMO and Networked Radar:the Future of Radar Sensors[C].Proceedings of the 7th European Radar Conference,Paris,France.2010,81-84.
[3]史仁杰,高红卫,新一代弹道导弹防御雷达—分布式相参合成孔径相控阵雷达[C].第十二届雷达年会论文集.2012,1043-1049.
[4] 强勇,张冠杰,李斌.MIMO雷达进展及其应用研究[J].火控雷达技术.2010,39(1):1-10.
[5] 高红卫,曹 哲,鲁耀兵,分布式阵列相参合成雷达基本研究与原理验证[C].第十二届雷达年会论文集.2012,129-134.
[6] 马井军,马维军,赵明波,组网雷达作战分析与几点思考[J].国防科技,2010,31(4):28-33,49.
[7]Merrilli.Skolnik Radar Handbook II[M].Boston,Massachusetts Burr Ridge,Illinois Dubuque,Iowa Madison,Wisconsin New York,New York San Francisco,California St.Louis,Missouri.
[8] 曹哲,柴振海,高红卫,鲁耀兵,分布式阵列相参合成雷达技术研究与试验[J].现代防御技术2012,40(4):1-11.
[9] 鲁耀兵,张履谦,周荫清,高红卫,分布式阵列相参合成雷达技术研究[J].系统工程与电子技术.2013,35(8):1657-1662.
[10] 殷丕磊,杨小鹏,曾涛,分布式全相参雷达的相位差跟踪技术[J].系统工程,2013,29(3):313-318.
[11]Michael A.Deaett,et al,Bandwidth Assignment for Target Tracking in Coherent Distributed Aperture Radar Networks[C].IEEE International Symposium on Phased Array Systems and Technology(ARRAY).2010,344-347
[12]Hongwei Gao,Zhe Cao,et al,Study on Distributed Aperture Coherence-synthesizing Radar with Several Experiment Results[C].IEEE,radar conference.2011,84-86.
[13]金镇,籍刚,曹哲,共置天线的分布式相参MIMO雷达布阵优化研究[J].系统工程与电子技术,2012,34(12):2468-2472.
[14]曾涛,殷丕磊,杨小鹏,范华剑,分布式全相参雷达系统时间与相位同步方案研究[J].雷达学报,2013,2(1):105-110.
