一种基于连续蚁群算法的快速最大似然DOA估计
2014-06-23王辉辉陈玉凤
王辉辉 陈玉凤
(1.西安电子工程研究所 西安 710100;2.西北工业大学航海学院 西安 710072)
0 引言
DOA(Direction Of Arrival)估计在雷达、声纳、无线通信、无源定位等领域有着重要应用。最大似然估计(maximum likelihood,ML)[1]算法是一种渐进无偏估计,它不仅在高信噪比下性能逼近克拉美罗界,达到最佳,而且在低信噪比下也具有很好的性能。在方位估计问题中,由于最大似然估计算法需要在全局进行最优化求解,因此不可避免引入复杂的计算和多维的非线性求解,这会导致ML算法的收敛性变差,同时不易求得最优解[2]。近些年,为了解决最大似然估计的计算量大的问题,迭代的方法[3]、遗传进化的方法[4]和马尔科夫蒙特卡罗的方法[5]被引入ML估计的求解中,但是这些方法要求给定一个比较接近真值的初始值,容易收敛到局部极值点,难以收敛到全局最优点等问题。意大利学者Dorigo M首次提出了蚁群算法,该算法是一种基于模拟蚂蚁觅食行为的模拟进化算法。焦亚萌等人将蚁群算法引入到最大似然估计的求解中,提出了ACOML算法[7],大大降低了运算量,但是该算法使用随机分布的策略来实现状态空间的初始化,因此初始解的遍历性不能得到很好的保证。本文使用混沌序列代替随机序列进行状态空间的初始化,以增加初始解的遍历性,同时为了寻求最优解还在全局搜索的基础上增加了局部搜索,使得计算量大大的减小,仅为ML方法的1/20,同时还具有和ML算法一致的分辨估计精度。
1 ML算法
假设阵列为均匀线列阵,且具有M个各向同性的阵元。各阵元接收到的噪声为加性的高斯白噪声,且彼此相互独立。噪声均值为零,方差为σ2n。那么对于N次采样数据的联合概率密度函数为:
上式中‖‖表示Euclidean范数;A()θ表示M×P维阵列流型矩阵,分别表示阵元个数和入射信号源个数;S表示目标信源复振幅矢量。对上式两边取负对数可得:


2 基于改进蚁群算法的最大似然估计算法(MACOML)
2.1 基于连续空间的蚁群算法
蚁群算法最早是用来解决组合优化问题的,主要是针对离散空间的,在最优解的求解过程中,蚂蚁在搜索路径上信息量的留存、增减等的选择,都是通过点状分布的方式来求解的。而连续空间是用区域性的方式来表示解空间的,因此连续空间的蚁群算法和离散空间的蚁群算法在蚁群寻找最优解的方式和策略上有一些不同。对基于连续空间的蚁群算法来说,蚂蚁在整个连续空间的搜索过程中,蚂蚁下一步的搜索是由转移函数来确定的,因此转移函数能够影响整个蚁群的行进策略,进而影响整个算法,因此对于连续空间的蚁群算法要选取合适的转移函数。对于连续空间的蚁群算法,采用最多的就是采用概率密度函数作为转移函数,用具有高斯核的概率密度函数作为连续空间蚁群算法的转移函数,如下式所示:
上式中的Θ对应于整个连续的搜索空间,i表示整个搜索空间的维度;wl(l=1,2,…,L)为权值向量,且ωl(Θ)~N(1,q2L2),各向量之间相互独立;,其中L是搜索空间的抽样个数。
2.2MACOML算法
ACOML算法使用随机分布的策略来实现状态空间的初始化,因此初始解的遍历性不能得到很好的保证。而混沌序列具有很好的遍历性,因此本文首先用Logistic映射来产生一个混沌序列,用该混沌序列代替随机序列来初始化状态空间,然后再将初始解映射到整个解空间寻优的可行域内。在蚁群算法的一次迭代过程中蚂蚁没有找到最好的解,蚂蚁会向找到较优解的蚂蚁所在的解空间位置移动,这一过程称为解空间的全局搜索,在ACOML算法中蚂蚁搜索方式只有全局搜索,由于解空间为连续空间,因此全局搜索得到的解并不一定是该状态内的最优解,因此本文在全局搜索的基础上增加了局部搜索功能,也就是在算法循环过程中,蚂蚁要在自身确定的附近的小邻域范围内进行随机搜索,得到比当前更优的解。MACOML算法步骤如下:
a.利用Logistic映射产生初始状态空间

其中κ是一个常数,且3.5≤κ≤4,用来表征混沌状态的程度,Li(t)∈(0,1)。假设搜索角度的范围为,将这个混沌序列映射到搜索角度的可行域内,映射方式如下所示:

对应目标函数值f,将搜索空间进行降序排列,目标函数值f为方位的似然估计值。权值向量由式(8)计算:

且wl~N(1,q2L2)。图1为档案表,其中的目标函数值、权值ωl、解状态空间一一对应。

图1 档案表
b.候选状态的更新
在整个状态空间中,蚂蚁选择下一个状态的概率为pl,即以概率pl选取第l个以为均值,为方差的一维高斯函数进行采样,如式(9)所示,其中q为一个可调参数。是当前选中的状态和整个状态空间的平均偏差的修正量,该修正量用信息素挥发系数ξ(ξ>0)来修正,ξ类似于离散空间中蚁群算法中的挥发速率。每只蚂蚁在整个搜索空间中以pl选择当前解Θl,在一次迭代过程中,每只蚂蚁只需选择一次,然后由式(5)确定蚂蚁的下一组候选解Φ。
c.局部搜索
一次循环中蚂蚁获得最优解为θi,在其小邻域范围内再进行局部的随机搜索。设随机搜索的新位置为 θ0,如果 f(θ0)> f(θi),则 θi= θ0,否则保持当前解。搜索是向着最优方向寻找的,因此局部搜索的搜索步长应该随着循环次数的增加而逐步的减小,这样可以提高搜索速度。局部搜索新位置由式(10)确定,式中σ为局部搜索步长:

局部搜索步长由(11)式确定:

式中σmax和σmin为常数值;kk为当前循环次数;iter为循环次数。为了降低人为因素,本文通过随机采样对步长进行更新,步长参数更新由式(12)为:

d.更新状态空间
根据新产生的解计算其目标函数值,若f(Φ)>f(Θ1),则ΘL=Φ,其中Θ1,ΘL分别对应状态态空间的第一个和最后一个状态,根据目标函数值f将搜索空间进行降序排列。否则状态空间不发生变化。
e.迭代结束判决
3 算法仿真分析
接收基阵为8阵元的均匀线列阵,阵元间距为半波长。两个等强窄带信号源入射角分别为-3°和3°,中心频率为f0=3MHz,采样频率为fs=6MHz,采样快拍数为100,档案表中的解的个数为L=100,q=0.1,ξ=0.01。蒙特卡洛实验次数为100次。角度扫描范围为搜索步长为step=0.2°。利用计算机仿真来评估算法的性能。
对于ACOML和MACOML来说,对于两个目标的最大似然估计,两种方法的蚂蚁种群个数都是2,也就是几个目标对应蚂蚁种群就有几只蚂蚁。图2给出了信噪比为5dB时,ACOML和MACOML的迭代收敛过程。在经过136次迭代后MACOML算法收敛到最优值,而ACOML算法需要710次迭代才能收敛到最优结果。两种算法在经过迭代后都可以收敛到最优解,能够准确的估计目标的方位,但是MACOML收敛所使用的次数明显少于ACOML算法。
每个目标方位估计值与其所对应的真实方位值之差的绝对值小于相邻两个目标真实值间隔的一半,就认为两个目标是可分辨的。本文中将算法能够成功分辨两个或者多个目标的概率,也就是两个目标可分辨的概率称之为分辨概率。图3是在不同信噪比下三种算法的分辨概率曲线,由图可知三种算法对双目标的分别概率几乎一致。
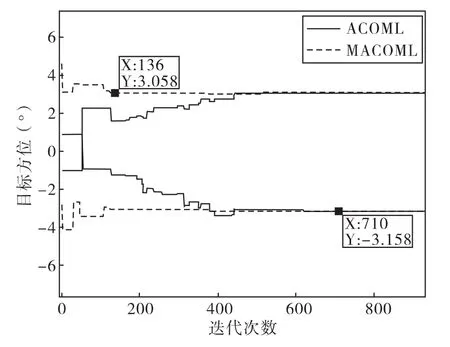
图2 优化迭代结果

图3 分辨概率曲线
本文中对新算法估计性能评价的另一个衡量因素为估计精度的均方误差(RMSE),RMSE的计算是在可分辨的基础上进行的,也就是只统计可分辨的估计值,它是对多次蒙特卡洛实验的估计值和真实值的均方差的一个平均。图4为三种算法的均方根误差曲线。信噪比低于-14dB时,方位估计精度均方根误差起伏较大,这是由于在低信噪比条件下三种方法的分辨概率都已经不高,统计的均方根误差没有实际意义。
计算量分析:定义ML算法进行一次谱峰搜索所需要的计算量为Δ,则ML算法的复杂度为JML=。对于ACOML和MACOML算法,T,I分别是蚂蚁个数、达到估计精度的最小迭代次数,则这两种算法的计算复杂度均为 J=。当信噪比为0dB时,MACOML、ACOML两种方法平均迭代次数为:IMACOML=185,IACOML=680,则对于双目标三种算法的计算量分别为:JML=10000Δ,JACOML=1360Δ,JMACOML=470Δ。
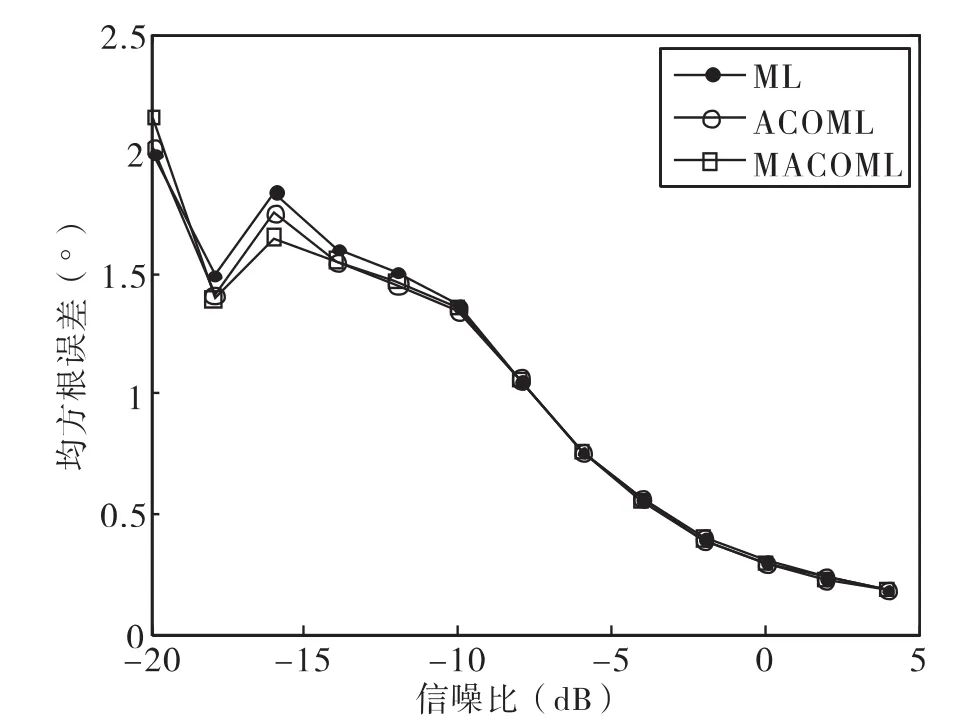
图4 均方误差曲线
由以上分析可知三种算法的性能几乎一致,MACOML算法的计算量约是ML算法的1/20。,ML的计算量随着目标个数的增多呈指数增长,而ACOML、MACOML算法的计算量则仅仅是线性增长,因此,当目标个数增大时本文提出的快速算法的运算速度会更加优于ML算法。另外随着方位的搜索范围变大,搜索步长减小,ML算法的计算量会增大,而ACOML和MACOML算法不受这些因素的影响。
4 结束语
最大似然方位估计方法在进行谱峰搜索时需要进行多维网格非线性搜索,随着目标个数增加,计算量呈指数关系增长,针对计算量大的问题,本文在ACOML算法的基础上提出了一种改进蚁群算法的最大似然估计算法MACOML,采用Logistic映射产生的初始状态空间来代替ACOML算法中的随机序列产生的初始状态空间,提高了初始种群在搜索空间中的均匀性,同时在寻优过程中增加了局部搜索,给出了算法的详细步骤。计算机仿真实验表明:在双目标情况下,新方法保持了最大似然估计方法的高分辨性能,同时计算复杂度变小,为工程的实现奠定了重要的基础。
[1]W.J.Zeng,X.L.Li.High-resolution multiple wideband non stationary source localization with unknown number of source [J].IEEE Trans.on Signal Processing,2010,58(6):3125-3136.
[2]A.A.Tadaion,M.Derakhtian,S.Gazor,et al.A fast multiple source detection and localization array signal processing algorithm using the spatial filtering and ML approach [J].IEEE Trans.on Signal Processing,2007,55(5):1815-1827.
[3]Petre Stoica,Randolph L.Moses,Benjamin Friedlander,et al.Maximum likelihood estimation of parameters of multiple sinusoids from noisy measurements[J].IEEE Trans.on A-coustic,Speech,and Signal Processing,1989,37(3):378-392.
[4]M Li,Y Liu.Genetic algorithm based maximum likelihood DOA estimation [DB].RADAR,2002,502-506.
[5]金勇,李捷,黄建国,基于Metropolis-Hastings抽样的短采样宽带信号近似最大似然方位估计AML算法[J].系统工程与电子技术,2009,31(12):2809-2812.
[6]Colorni A,Dorigo M,Maniezzo V,et al.Distributed Optimization by Ant Colonies.In Proceeding of the 1st European Conference on Artificial Life [C].Paris,France,1991,134-142.
[7]焦亚萌,黄建国,侯云山,基于蚁群算法的最大似然方位估计快速算法,系统工程与电子技术,2011,33(8):1718-1721.
