一种双向测距与时间同步系统的设计与分析
2014-06-21马红皎吴华兵李梦王康武建锋何在民胡永辉
马红皎,吴华兵,3,李梦,3,王康,3,武建锋,何在民,胡永辉
一种双向测距与时间同步系统的设计与分析
马红皎1,2,吴华兵1,2,3,李梦1,2,3,王康1,2,3,武建锋1,2,何在民1,2,胡永辉1,2
(1. 中国科学院国家授时中心,西安 710600;2. 中国科学院时间频率基准重点实验室,西安 710600;3. 中国科学院大学,北京 100049)
在研究双向单程伪距测量原理的基础上,设计了双向测距与时间同步(DRTS)终端系统总体构架,阐述了在系统中使用的技术,并搭建了基于DSP+FPGA的双向测距与时间同步系统软硬件平台。实验结果表明,此系统的码速率为5MHz、中心频率为15 MHz时,测距和时间同步的分辨率可达0.15cm和5ps(@1s),采用不同频率源时测距和时间同步的精度分别为1.038 m和3.46 ns, 采用相同频率源时分别为0.28 cm和9.43 ps(参考频率稳定度1×10-10/d量级)。与国外同类产品相比具有测量精度优势,但考虑通用性,此系统的硬件仍需进一步优化,软件上需要做到码速率可调。
精密测距;时间同步;双向单程伪距测量;双向测距与时间同步(DRTS)
0 引言
随着航天航空试验、导航、通信、电力等科学技术的发展,越来越多的工程和科学领域需要精密时间同步。比如:世界各时间实验室需要纳秒或亚纳秒量级的高精度时间同步;卫星发射、测控,试验靶场的原子钟需要标校;导航卫星之间、卫星与地面站、地面站之间需要高精度时间同步;另外,自主编队航天器(AFF)、组网飞行器等,也需精密基线测量和时间同步。基于双向精密测距的时间同步终端,在国内尚无成熟商业产品,国内用户目前主要依靠进口。
本文在介绍双向单程伪距测量原理的基础上,设计了一种双向测距与时间同步(dual ranging and time synchronization,DRTS)系统。分析了此DRTS系统构成框架、系统中使用的关键技术、发射与跟踪信号质量的判别,最后给出系统的测试结果和配套计算机软件的功能模块及本软件中所使用的新技术与新方法。
1 双向单程伪距测量原理[1-2]
双向单程伪距测量(dual one-way ranging,DOWR)是在两终端各自安装发射机和接收机,通过伪码和载波相位测量,各自得到相对伪距,通过双向测量消除钟差,实现两终端间精密测距和时间同步。DOWR的时序原理如图1所示。

图1 DOWR的时序原理
由图1可知:






2 DRTS系统构成框架
本文设计的DRTS系统由接收通道、发送通道、频率基准、中频信号处理机、显控计算机、电源配电器6大部分构成,如图2所示。该系统主要包括铷钟、多普勒模拟单元,基准源放大及分路器、频率综合器、噪声源、A/D采样、综合基带处理单元,BPSK调制器及设备监控单元和计算机等主要组成单元。

图2 DRTS单套设备总体功能框图
3 DRTS系统中使用的技术
DRTS系统的单程伪距测量与GNSS伪距测量方法相同:终端A的码跟踪环在锁定后输出帧同步计数、数据位计数、扩频码相位计数和扩频码片相位计数,这样终端A可计算得到本地信号发送时刻与终端B信号接收时刻的时延测量值。此方法计算获得的距离是终端B发出传输帧头时刻终端A和B之间的距离值,每收到终端B发出的帧头就输出一次新的距离值,因此距离计算值输出周期即为传输帧长周期。
DRTS系统的技术主要包括:测距信号的设计、产生和发送,信号格式类似GPS,扩频码采用5 Mcps的伪随机码,测距电文的帧头采用13位巴克码,为降低误码率,电文采用BCH(15,11,1)码加交织方式进行纠错;DRTS系统还涉及测距信号的快速捕获、信号跟踪和解调和高精度的信号处理方法。时间同步的精度取决于伪距的测量精度,其中采用载波相位平滑伪距进行伪距的测量,详细内容介绍参见文献[3]。同时,为了适应高动态环境,跟踪环路中采用2阶锁频环辅助3阶锁相环的算法。图3、4和5为仿真结果,其仿真环境为:速度8 km/s,加速度20 g,加加速度2 g/s。从图3至图5中可以看出,鉴相器估计的载波相位残差、载波频率残差和伪码相位残差,都在信号捕获2s后趋于0,说明系统的跟踪环路可适应高动态环境。
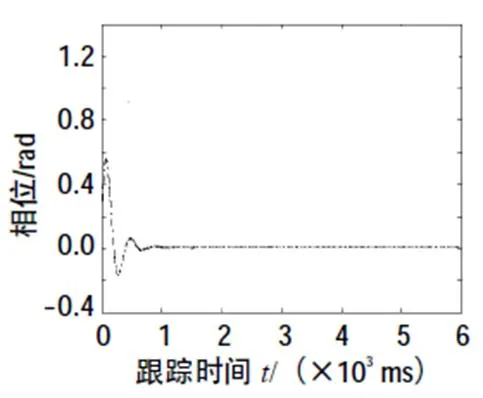
图3 载波相位残差

图4 载波频率残差
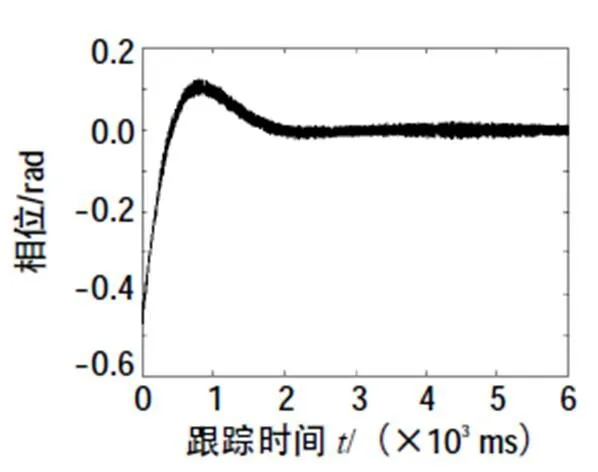
图5 伪码相位残差
4 仿真与试验结果
4.1 DRTS系统样机
DRTS实验系统样机如图6所示。

图6 本实验系统样机图
4.2 信号跟踪质量的判别
发射与跟踪的伪码示波器的显示如图7所示,由图7可以看出发射与跟踪部分明显存在一定量的固定时延。

图7 发射与跟踪的伪码示波器显示
DLL环鉴相器输出误差,表征码环的跟踪精度;同理载波环鉴相器输出误差,表征载波的跟踪精度。在FPGA中,码跟踪环路滤波器的输出是0.2 ms一个数据。每秒采集一个数据后计算码相位跟踪误差=0.004 87 chip,如图8所示。载波相位跟踪误差=0.398°,如图9所示。
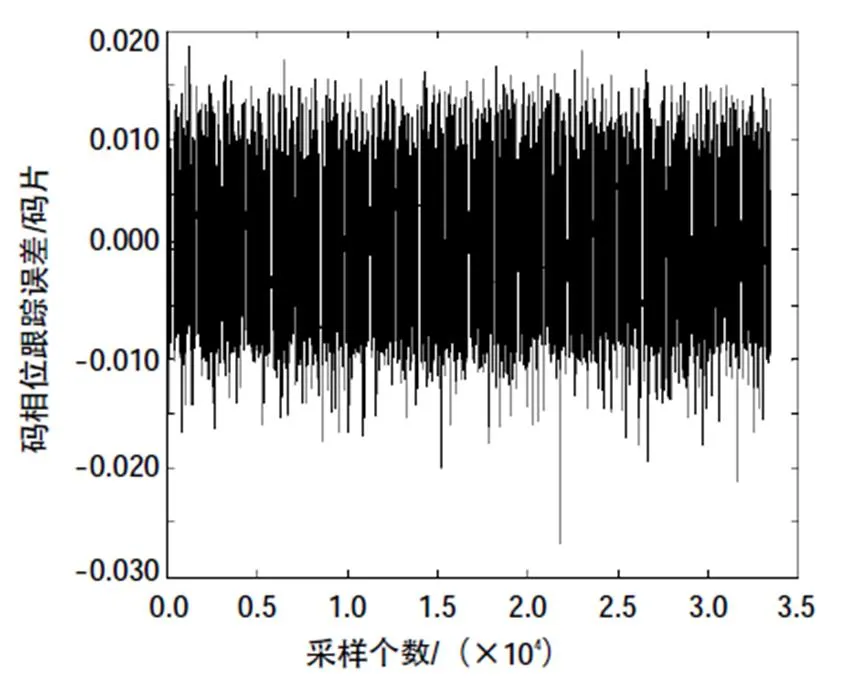
图8 码相位跟踪误差

图9 载波相位跟踪误差
4.3 系统测试结果图
用60 m同长对称电缆,模拟空间链路。设双向对称60 m同轴电缆的延迟为,那么等于信号在电缆中每米的传播时延(ns)与电缆长度之乘积和系统的发射延迟1以及系统的接收延迟2之和,即=60×+1+2,通过多次测试求解,可得信号在同轴电缆中每米的传播时延约为5 ns,设备在当时开机情况下的发射和接收延迟之和约为40.2 ns。
然后,使用同源和不同源铷钟分别进行测试,可以得到本地伪距、对方伪距、钟差和真实距离等值,测试结果如图10和11所示。对整机终端系统的各项指标进行了测试,测试结果表明不同源的铷原子频标日稳定度在1×10-10、准确度在1×10-9时,该终端机能够达到的测距精度和时间同步精度分别为小于等于1.038 m和3.46 ns(),满足原来的设计要求,可以用于自主编队飞行器等星间组网伴飞等的精密基线测量和时间同步测量。如果在同源时相等量级的铷标情况下,测试精度均值为0.279cm/9.3ps(),这个值表征了此环境下,设备的测量最佳极值。系统的测距和时间同步的分辨率可达0.15cm和5 ps(@1 s),比国外同类产品[4]优越1倍。详细比较见表1。由于与国外同类产品所使用的参考频率源的稳定度与准确度量级均低,测距与时间同步的精度没有直接可比性,但从数据结果进行分析,如果使用相同量级的频率参考源时,本系统仍具有优势。

图10 60 m同源

图11 60 m不同源
表1 本系统DRTS与德国SATRE MODEM的比较

4.4 计算机配套软件
计算机配套软件功能模块包括:
1)串行通信口的选择、波特率、数据位、停止位、奇偶校验等参数的控制;
2)数值的显示和图形界面的显示:包括两站之间各自的伪距测量值、两站间的钟差、两站间的真距;
3)数据的分析和处理模块:包括数据采集、结果显示和结果储存。
本软件中使用的新技术与新方法包括:
1)根据分辨率自动调整软件界面文字和控键的大小和位置;
2)程序从系统注册表中读取已有串口逻辑端口数,并提供给用户进行选择。这样避免了程序盲目显示,用户盲目选择串口的问题;
3)在通信中创建专门的线程,保证了通信的及时性和稳定性。
双向测距与时间同步系统的计算机配套软件界面如图12所示。

图12 计算机软件界面图
5 结语
DOWR原理中,由于测量路径的对称性而消除了两点之间共同的误差,从而获得比单向测距更高的测量精度。本文利用双向单程伪码和载波相位精密测距,对实现两点间的时间同步技术进行了初步探索。系统误差主要来源于两个方面,即由射频前端引起的零漂和基带电路引起的组合零漂,以及由温度引起的射频相位延迟变化[5]。另外,考虑设备的通用性,以及与国外同类产品的无缝对接,本系统仍需进一步优化。双向测距和时间同步系统,可应用于未来天地一体化的航空航天测控、信息传输领域的高精度时间测控平台中,为卫星与卫星、卫星与地面站、飞行器之间、站间等多种模式提供时间服务。
[1] KO U D. Analysis of the Characteristics of the Grace Dual One-Way Ranging System[D]. USA: the University of Texas at Austin, 2008: 161.
[2] THOMAS J B. An analysis of gravity-field estimation based on intersatellite dual-1-way biased ranging[R]. California: JPL Publication, 1999.
[3] 李梦. 载波相位平滑伪距在双向测距与时间同步中的应用[C]//第四届中国卫星导航学术年会论文集. 武汉: 2013中国卫星导航学术年会组委会, 2013.
[4] SA-TIM-MA-1004. SATRE Modem Overview[K]. 2002.
[5] WU Hua-bing, HU Yong-hui. Design and implementation of precise ranging and time synchronization system based on DOWR [C]//2012 International Conference on Measurement, Harbin: IEEE Computer Society, 2012: 239-243.
Design and analysis of system of dual ranging and timesynchronization
MA Hong-jiao1,2, WU Hua-bing1,2,3, LI Meng1,2,3, WANG Kang1,2,3, WU Jian-feng1,2, HE Zai-min1,2, HU Yong-Hui1,2
(1. National Time Service Center, Chinese Academy of Sciences, Xi'an 710600, China;2. Key Laboratory of Time and Frequency Primary Standard, National Time Service Center, Chinese Academy of Sciences, Xi'an 710600, China;3. University of Chinese Academy of Sciences, Beijing 100049, China)
A framework of DRTS(dual ranging and time synchronization) system was designed based on the principle of DOWR(dual one-way ranging). The technique used in the system was demonstrated. And a hardware/software platform for DRTS system was built based on DSP and FPGA. The results from experiment show that the ranging resolution and time synchronization resolution are 0.15 cm and 5 ps(for 1s time interval) respectively for the DRTS system when the code rate is 5MHz and the centric frequency is 15 MHz, and the ranging precision and time synchronization precision are 1.038 m and 3.46 ns respectively when different frequency references are used as well as the ranging precision and time synchronization precision are 0.28cm and 9.43 ps respectively when the same frequency reference with a frequency stability of 10-10is used. The DRTS system is superior to foreign similar products in measuring precision. However, in view of versatility, the hardware of the DRTS system still needs further optimization and the software of the DRTS system should be improved to be able to adjust the code rate.
precise ranging; time synchronization; dual one-way ranging; DRTS(dual ranging and time synchronization)
TN96
A
1674-0637(2014)01-0018-07
2013-03-21
中国科学院“西部之光”人才培养计划资助项目(O905YR2601)
马红皎,男,博士,副研究员,主要从事时间频率传递、卫星导航研究。