灰色模型与二次多项式模型组合的GNSS时差预测
2014-06-21张继海袁海波董绍武殷龙龙
张继海,袁海波,董绍武,殷龙龙
灰色模型与二次多项式模型组合的GNSS时差预测
张继海1,2,3,袁海波1,2,董绍武1,2,殷龙龙1,3
(1. 中国科学院国家授时中心,西安 710600;2. 中国科学院时间频率基准重点实验室,西安 710600;3. 中国科学院大学,北京 100049)
为实现多模组合导航,必须确定各导航系统之间的时间差。利用中国科学院国家授时中心(NTSC)双模双频时差监测型接收机输出的数据文件,通过分别计算本地时与GPS时、GLONASS时的偏差间接计算两系统间的时间偏差。采用灰色预报模型和二次多项式模型进行联合时差预报,对实测时间偏差值与预报时间偏差值之间的残差进行分析。试验结果表明与传统的二次多项式模型预报相比,组合预报结果的精度有所提高。
时差预报;灰色预报;二次多项式模型;组合预报
0 引言
随着全球卫星导航系统(GNSS)的不断更新和逐步完善,多模组合导航的优势越来越明显。统一的时间参考是实现GNSS系统之间互操作与多模组合导航的必要条件之一。虽然各导航系统都具有PVT(定位,测速,授时)功能,但各个导航系统都有各自的系统时间,并且通过不同的方式溯源到UTC或UTC()。根据ITU的发播标准,导航授时系统的时间与UTC的偏差必须控制在100 ns以内,这就要求各个导航系统时间与UTC同步,进而实现GNSS系统间的协调与互操作。精密确定各个导航系统间的系统时间偏差并对各导航系统进行时差监测与预报,为GNSS系统间的协调与互操作在时间方面提供技术支持。本文采用对GPST和GLONASST的实测数据,基于灰色预报模型与二次多项式模型组合方法预报GPST与GLONASST的时差,也为我国北斗系统发播的北斗时(BDT)与其他导航系统间的系统时间偏差预报提供参考。
1 灰色预报模型与二次多项式模型
1.1 灰色预报模型
在灰色系统理论中,(1,1)模型是最常用的一种灰色模型。

根据倒数离散化形式,式(1)可以写成[1-2]:
式(2)可简写为


通过式(5)得解为
式(6)的离散形式则为

式(8)中,≥1为预报点,预测点的原始序列则可写为

1.2 二次多项式模型



2 灰色模型与二次多项式模型组合预报时差的算法流程

3 试验及结果
本试验选取时差监测型接收机输出的共视数据,通过解算UTC(NTSC)-GPST与UTC(NTSC)-GLONASST,最终求得GPS与GLONASS两系统之间的时间偏差。
由于用户不能实时得到各系统之间的时间偏差,只能根据历史数据计算模型参数,估计当前时刻的时差值,预报值由计算的历史数据通过二次多项式模型预报算法和灰色预报模型算法进行计算得到。
由于数据是1 min一个值,一天的数据量较大,故本文选取的是连续2d(MJD56263~56264)的GPS与GLONASS系统间的时差数据。分别利用模型进行短期预报(即每次利用模型预报下一个时刻的值,同时更新预报窗口中的数据重新计算模型参数,为预报下一个点做准备)和利用模型进行长期预报(即每次利用模型连续预报30 min内即30个点的数据,同时更新预报窗口中的数据并重新计算模型参数,为预报后面30个点做准备)。利用1.1与1.2节所描述的数学建模算法进行处理,得到两系统时间之间的时差值的实测值与组合预报值,如图1所示。图2和图3分别是组合预报值与实测值之间的残差(短期预报)和二次多项式模型预报值与实测值之间的残差(短期预报)。图4~6是长期预报结果。

图1 两系统之间的时差的实测值、组合预报值和二次多项式模型预报值(短期预报)
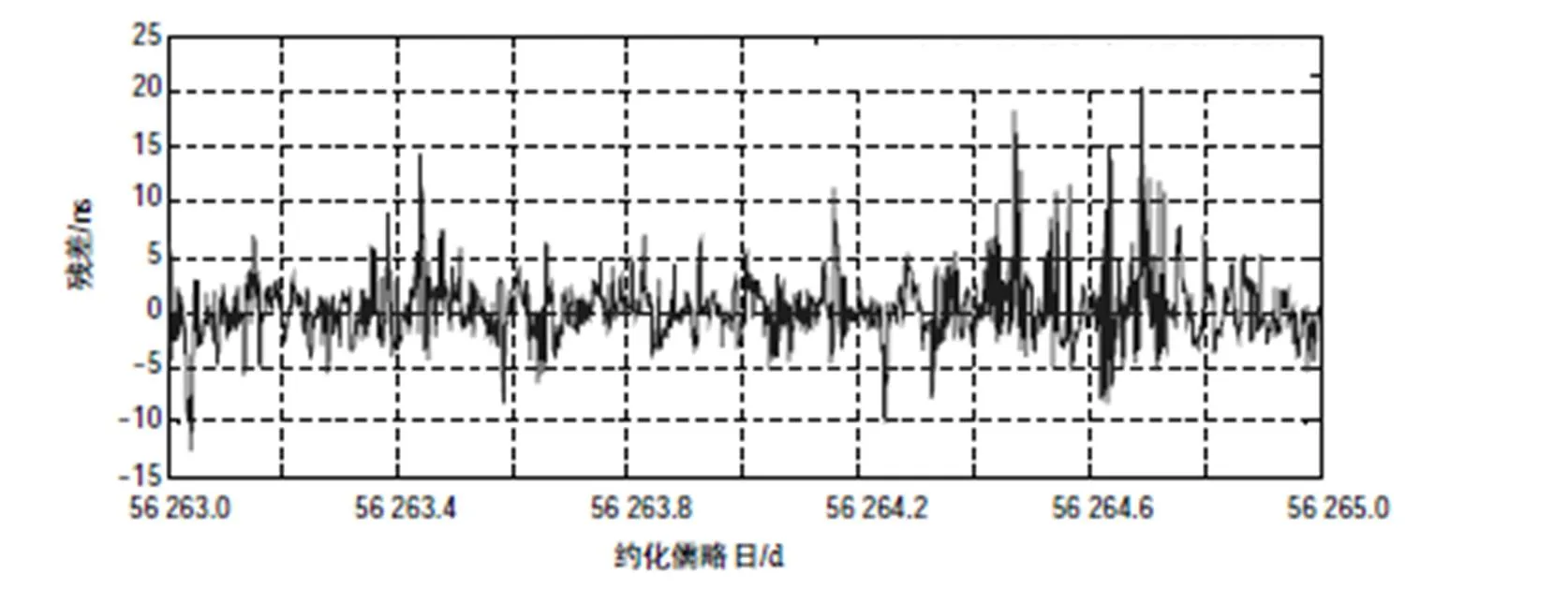
图2 组合预报值与实测值之间的残差(短期预报)

图3 二次多项式模型预报值与实测值之间的残差(短期预报)
由图1~3可以看出,与实测值相比较组合模型进行短期预报的结果,明显优于传统二次多项式模型预报的结果。为了能更直观地从数值上进行比较,表1给出了几个时间段中的短期预测值与实测值之间的残差值的标准差与RMS(均方根植)。
表1 实测值与预测值之间残差值的标准差与均方根(短期预报) ns
图4 两系统之间的时差的实测值、组合预报值和二次多项式模型预报值(长期预报)

图5 组合预报值与实测值之间的残差(长期预报)
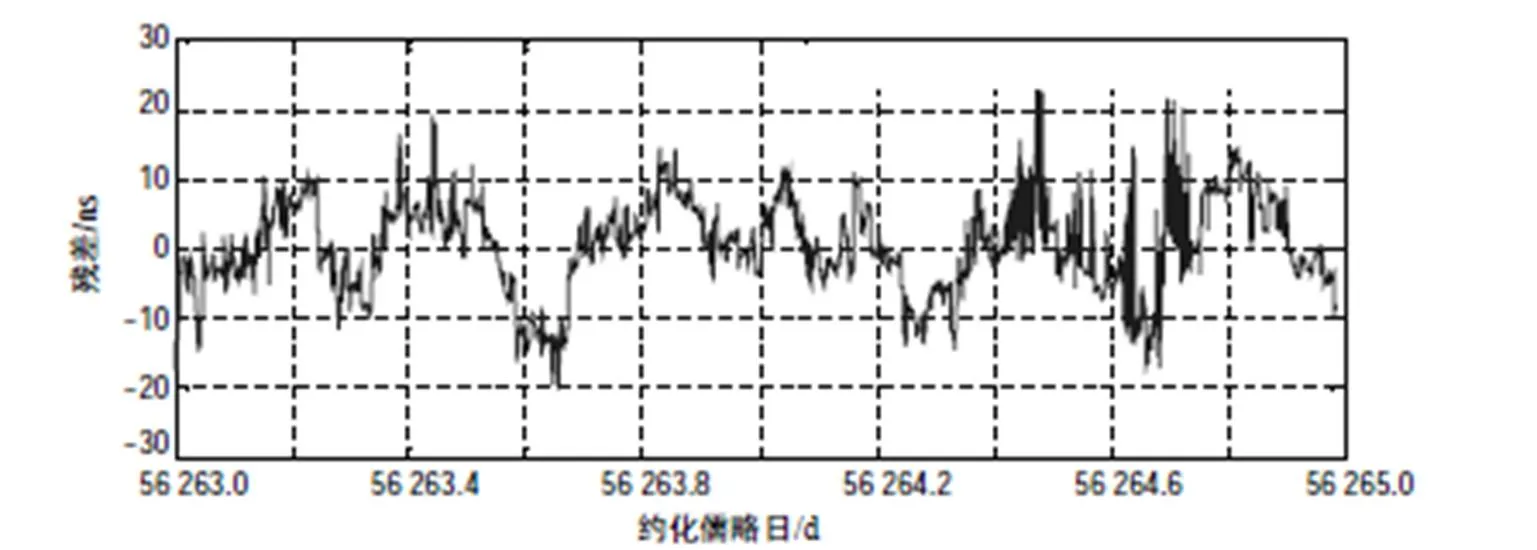
图6 二次多项式模型预报值与实测值之间的残差图(长期预报)
由图4~6可以看出,和实测值相比,组合模型进行长期预报的结果较优于传统最小二乘法预报的结果。为了能更直观地从数值上进行比较,表2给出了几个时间段中的长期预测值与实测值之间的残差值的标准差和RMS(均方根植)。
表2 实测值与预测值之间残差值的标准差与均方根(长期预报) ns

通过以上分析,可以看出利用国家授时中心时差监测型接收机输出的本地时与GPS系统时的时差数据以及本地时与GLONASS系统时的时差数据,可以解算出GPS与GLONASS两系统间的时差,并进行时差预报。通过对实测时差值与短期和长期预报值进行分析,可以看出组合预报结果优于利用二次多项式模型预报的结果。
4 结语
通过分析与基于单站时差监测法实际计算GPS系统时间与GLONASS系统时间的时间偏差和进行时差预报模型产生方法的试验验证,表明了采用单站时差数据进行时差监测与预报的可行性和有效性。试验中采用固定窗口滑动模型参数的动态更新方法,并采用灰色预测模型与二次多项式模型组合进行模型参数的拟合,基于动态更新的模型进行时差数据的预报。通过预报值与实测值的比较分析,表明组合预报的结果优于利用传统的二次多项式模型预报的结果。
[1] YUAN Hai-bo, WANG Zheng-ming, DONG Shao-wu. Dynamic grey-autoregressive model of an atomic clock[J]. Metrologia, 2008, 45(6): 1-5.
[2] 邓聚龙. 灰预测与灰决策[M]. 武汉: 华中科技大学出版社, 2002: 71-76.
[3] 王志浩, 胡永辉, 侯雷, 等. 二次多项式模型和灰色理论模型在接收机钟差预报中的应用和比较[J]. 时间频率学报, 2014, 37(3): 157-163.
[4] 丁月蓉. 天文数据处理方法[M]. 南京: 南京大学出版社, 1998: 104-114.
[5] 广伟. GPS PPP时间传递技术研究[D]. 北京: 中国科学院研究生院, 2012.
[6] 田力, 陈俊平, 裴宵, 等. GNSS时差及其在多系统组合定位中的应用[J]. 北京: 测绘通报, 2012, 10: 45-47.
[7] 张慧君, 李孝辉. GNSS系统时间偏差及其监测与预报[C]//2009年全国时间频率学术年会, 成都: 时间频率学术年会会务组, 2009: 471-476.
Prediction of GNSS time difference based on combination of Grey model and quadratic polynomial model
ZHANG Ji-hai1,2,3, YUAN Hai-bo1,2, DONG Shao-wu1,2, YIN Long-long1,3
(1. National Time Service Center, Chinese Academy of Sciences, Xi′an 710600, China;2. Key Laboratory of time and Frequency Primary Standard, National Time Service Center,Chinese Academy of Sciences, Xi′an 710600, China;3. University of Chinese Academy of Sciences, Beijing 100049, China)
For realizing the multimode combined navigation, it is necessary to determine the time differences between the different navigation systems. In this paper, the data outputted from a dual-mode/dual-frequency time-difference monitoring receiver, which is operated in the time keeping laboratory of the National Time Service Center(NTSC), is used for calculating the time differences between the local time and GPST/and GLONASST, then the time difference between GPST and GLONASST can be calculated indirectly. The Grey model and the quadratic polynomial model are combined for predicting the time differences, and then the residuals between the measured time difference and the predicted time difference are analyzed. The results show that the accuracy of the combination prediction algorithm is better than that of the traditional quadratic polynomial algorithm.
time-difference prediction; Grey prediction; quadratic polynomial model; combination prediction
P228.4
A
1674-0637(2014)04-0199-07
10.13875/j.issn.1674-0637.2014-04-0199-07
2013-01-08
国家自然科学基金资助项目(10873013)
张继海,男,硕士,主要从事高精度时间传递研究。