基于半实装的无人机模拟训练系统研究与设计*
2014-06-15李小民郑宗贵
云 超,李小民,郑宗贵
(1.解放军63891部队,河南 洛阳 471003;2.军械工程学院,石家庄 050003;3.第二炮兵研究院,北京 100085)
基于半实装的无人机模拟训练系统研究与设计*
云 超1,2,李小民2,郑宗贵3
(1.解放军63891部队,河南 洛阳 471003;2.军械工程学院,石家庄 050003;3.第二炮兵研究院,北京 100085)
针对传统面向无人机地面操控手测控训练任务的模拟训练系统存在的缺点,分析了面向无人机地面操控人员测控训练任务的主要特点,提出了一种基于实装地面测控站的无人机半实物仿真训练系统结构框架,设计了典型无人机模拟训练系统的结构层次和系统运行模式,与传统面向地面操控手的无人机仿真训练系统相比,所提出的仿真系统架构具有逼真度高、易于实现和复用、开发技术成熟等优点,在提高训练效率、节省训练成本方面具有重要应用价值。
无人机,仿真训练,面向测控训练,训练效率
引言
无人机是集成了光、电、机、计算机等技术于一体的一种技术含量高、构成复杂的新型装备。它主要用于战场侦察、毁伤评估、火力攻击、通信监听、电子干扰、远程火力校射等,是提高远程精确打击能力、信息战能力、电子战能力的重要手段。模拟训练可以不受场地、空间和气候条件的限制,它既可进行常规训练,还能培训操作手处理各种事务的应变能力。所以它以其高效率、高效益倍受各国军方的重视。随着武器装备的日趋复杂和兵器采办费用的不断提高,使得各国军事部门将模拟训练作为军事训练必不可少的手段之一,并且加以重点发展。
无人机地面操控手如果不能得到经常性、系统性的实装(实际装备)动手操作训练,已有的经验也会慢慢“遗忘”,操作技能与操作水平的增长滞后乃至脱节于熟练操作装备的需要,而且装备熟练运用能力较弱,不仅导致装备作战效能得不到充分发挥,而且操作技能的弱化还将带来极大的飞行安全隐患。据统计,无人机装备90%以上损坏是由于操作人员操作熟练程度低以及维修保障能力差等原因造成的。
无人机模拟操作训练设备在使用过程中主要存在以下问题:一是基于飞行仿真模型的全软件模拟训练系统,主要侧重对飞行过程的可视化仿真,它对理解工作原理、系统工作过程有一定帮助,但由于系统的真实感、沉浸感较差,而且训练功能单一,训练效果不佳;二是基于半物理仿真的模拟训练系统,主要侧重对操作按键的功能、操作流程的可视化理解学习。系统的外形结构虽然与实装相似,但内部物理结构差距较大,仿真度差。信号传输流程、信号结构与实装不一致甚至完全不同。而且这些系统往往结构庞大,放置、操作使用不方便。
1 飞行模拟训练技术概述
1.1 飞行模拟训练技术
飞行模拟训练就是运用飞行仿真系统进行模拟训练,是目前世界上各空军强国普遍采用提高战斗力的一种手段,它可以模拟很多难度很大的技/战术动作,既能保证飞行训练质量,同时也可以避免训练中的危险和不必要的损失,还可以节省经费开支,具有极大的经济效益。飞行仿真是以飞行器运动状况为研究对象,它按照飞行器的飞行动力学,空气动力学以及飞行控制原理等相关理论建立起的数学模型,以仿真模型为基础进行模拟仿真实验和研究分析,进而通过对模型的操作及仿真结果的分析,讨论并推断飞行器本身所具有的性质及运动变化规律[1]。
1.2 研究动态
现代仿真技术的发展使仿真技术扩展到了系统建模、仿真建模和仿真实验等三项活动。在应用仿真技术确定模型方面,采用了面向对象的建模方法,将抽象的数学描述为面向对象的更为自然的表述形式,以类库为基础实现了模型的拼合与重用;在建模方面,采用了模型与试验相分离技术,即模型的数据驱动;在仿真试验方面,将仿真的运行控制与试验框架区分开来,将输出函数定义与仿真模型分离开来[1]。
美国是世界上最早开展模拟训练技术研究和应用的国家之一,其技术和装备一直居国际领先地位。20世纪80年代以来,为满足高技术战争的需求,美军开始将计算机模拟作战训练作为军事训练的基本手段。同时还可以通过卫星联网和计算机模拟实现大规模模拟军事演习。从20世纪90年代起,美军把作战模拟系统正式用于实战。位于美国南部亚利桑那州华楚卡堡的无人机系统训练营(UASTB)模拟飞行时间占80%,而实际飞行时间只占20%,由此可见,无人机模拟训练在训练课程中的所具有的重要价值,典型的无人机模拟训练系统如图1所示。

图1 典型无人机模拟训练系统
俄罗斯同样是模拟训练系统的“强国”,俄罗斯为发展模拟训练系统是不惜成本的,其数量约占全世界的一半,仅俄试飞院就有昂贵的空中飞行模拟训练系统十余种。其先进武器装备几乎都编配有相应的模拟训练系统,而且其模拟训练系统正朝着通用化的方向发展[2]。
英国、法国、德国等西欧国家都十分重视装备的模拟训练。他们将模拟训练系统的发展作为军备竞赛的重要方面,这致使其模拟训练技术和应用始终处于世界的先进行列,形成了十分繁荣的西欧“模拟训练系统”市场。以色列、韩国、日本和印度等国亦不例外,他们同样不惜重金开发和普及模拟训练技术和相关设备[2]。
目前,无人机模拟训练方面所作的研究工作主要侧重纯软件仿真或半物理仿真模式的模拟操作训练,而且模拟操作训练主要侧重对飞行姿态的可视化表达,训练内容比较单一,此外系统结构庞大与实际需要结构简单轻便的要求还具有较大差距。
青稞是共和县主要种植作物之一,种植面积保持在1×104hm2以上,塘河地区是共和县青稞种植的主要区域。由于长期种植连作或者两年青稞、一年油菜的轮作模式,条纹病和黑穗病渐趋严重,产量降低,直接影响当地农村经济发展和农民收入的提高[1]。
2 无人机模拟训练系统总体结构
本文采用基于半实装的无人机模拟操作训练框架结构,即采用“看得见的地面实装”+“看不见的无人机飞行仿真系统”的组合方式来构建仿真训练系统,其结构框架如下页图2所示。

图2 半实装的无人机仿真训练系统结构框架
其中,“实装地面测控设备”主要指无人机系统中的地面数据终端和地面控制站等地面测控设备。采用这些实装进行训练,完全是真实环境,训练效果显著且训练经验可直接应用于实战。当前,由于无人机装备的质量状况普遍提高且装备更新周期明显加快,因此,在无人机地面测控装备的寿命内,完全不必要考虑其磨损的问题,而且采用实装地面测控设备进行模拟训练,不但能够提高无人机操作人员的实装的使用熟练程度和操作环境熟悉程度,还能代替地面测控设备定期“加电”维护保养工作;看不见的“虚拟”无人机飞机系统主要是指飞机飞行上天之后,不可见、采用仿真技术建立的无人机飞行仿真系统,它能够模拟真实无人机在天空中飞行的所有行为。
3 无人机飞行仿真系统设计
3.1 无人机飞行仿真对象
无人机飞行仿真系统不仅适用于前期的飞行控制率设计,而且它还是后期模拟训练器的重要组成部分。仿真系统的逼真程度直接决定着控制率设计的优劣和模拟训练器的训练效果,因此,仿真系统的逼真程度就显得尤为重要。本文研究的是面向测控训练的无人机飞行仿真系统,因此,在分析无人机系统结构组成和功能原理的基础上,研究高逼真的仿真系统的构建方法,而基于模型的飞行仿真系统设计则依赖系统精确的模型,即要求模型能够正确反映系统的本质特征,所以,建立高逼真的无人机动态仿真模型是仿真系统设计的核心内容。
通常无人机系统可以分成3大部分:地面系统、飞机系统和任务载荷。其结构如图3所示。①地面系统包括:地面辅助设备、地面监控分系统、起飞着陆系统地面部分、遥控遥测系统地面部分;②飞机系统包括飞行器平台、推进系统、飞控系统、导航系统、起飞/着陆系统机载部分、遥控遥测系统机载部分等;③任务载荷部分是无人机携带的机载任务设备,主要完成特定的作战任务,如侦察、攻击、校射等。根据机载设备的不同它主要分为机载侦察设备或机载攻击设备。无人机系统结构组成如图3所示[3]。

图3 无人机系统结构组成图
本文所设计的飞行仿真系统主要是用于无人机地面操控人员的模拟训练。因此,将机载任务设备列为一个单独的系统模块,它主要完成机载任务设备的有效仿真,即完成机载侦察设备或机载武器设备的仿真功能。
飞机系统和地面测控站通过数据链路相连,遥控遥测的地面部分和机载部分构成了无人机系统的数据链路,它负责无人机系统的指令、数据、情报的上传下达。另外,无人机的使用和保障人员是无人机系统不可缺少的组成部分,所以,有时候在进行无人机系统的设计、研制和使用过程时,也必须考虑人的因素[3]。
3.2 无人机仿真系统研究方案
建立高逼真的无人机飞行仿真系统是研究的重点,采用理论研究与实验验证相结合的方式。首先从理论上建立高逼真的无人机动力学模型、运动学模型、飞行环境模型和控制率模型等基本模型,然后分析研究各个子系统模型之间的耦合关系和信息交互方式,进而将其组合成无人机飞行仿真系统,最后通过实际无人机的飞行数据对这些模型进行修正,即利用典型无人机装备进行训练测试——实验验证。无人机飞行仿真系统总体研究方案如图4所示。
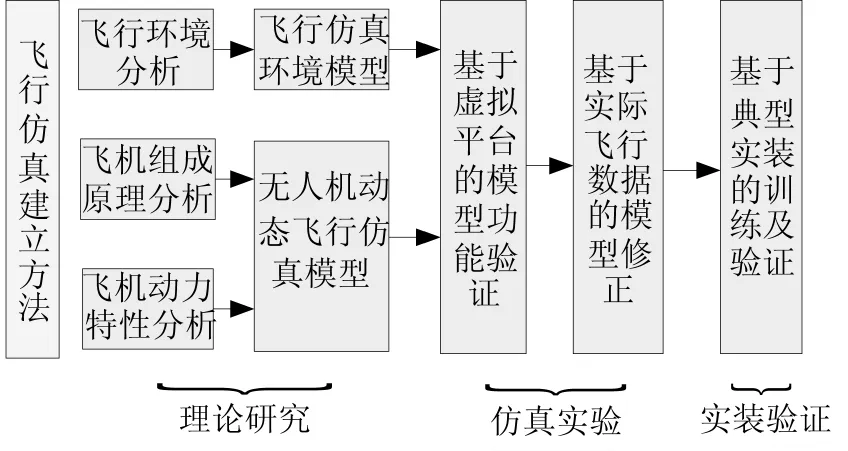
图4 无人机飞行仿真系统研究方案
3.3 飞行仿真系统层次结构
文中提出了一种基于面向对象思想的模块化、分层结构的无人机飞行仿真系统设计方案。面向对象技术认为客观世界是由各种相互作用的对象组成,它对复杂系统的建模易于理解、扩充、和与其他新技术、新方法(如人工智能)相结合,能够较好地解决模型的可靠性、准确性和柔性等问题[4]。根据无人机飞机系统的实际构成和各个部件的连接关系,可将无人机的飞机系统划分为一系列相互独立的对象模块并建立各自对象的数学模型。
依据无人机飞行仿真系统的设计要求,在面向对象的软件设计理论基础上,提出了一种模块化、层级式的体系结构,整个无人机飞行仿真系统分为3大模块:①飞控计算机子系统模型;②飞行运动解算子系统模型;③感知与执行子系统模型。每个子系统模型又由若干子功能模块组成,无人机飞行仿真系统模块层次结构如图5所示。
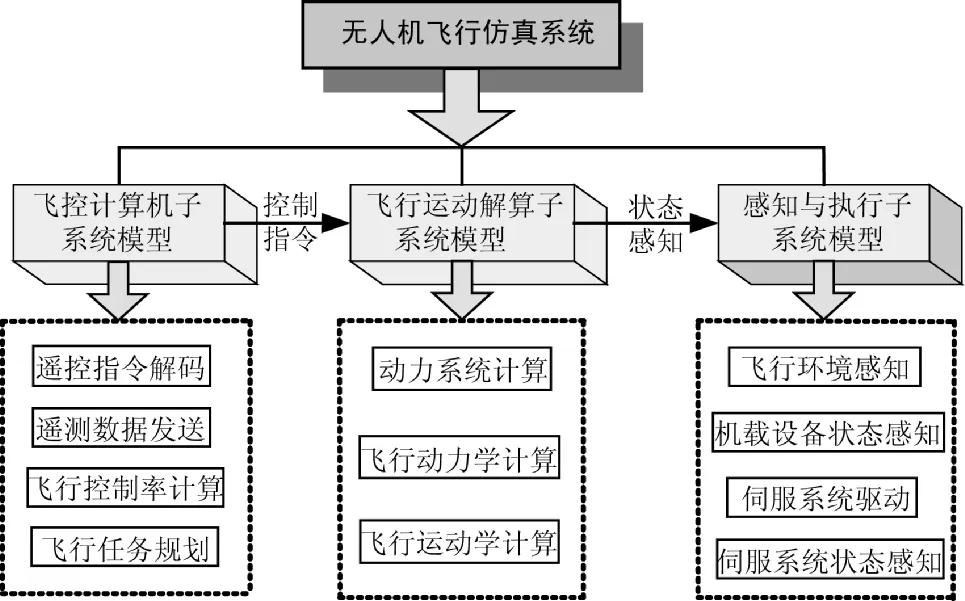
图5 无人机飞行仿真系统层次结构图
3.3.1 飞控计算机子系统模型
它是整个飞行仿真系统的“决策”部分,相当于无人机的大脑,主要完成飞控计算机的功能,即能够实时接收地面站的遥控信息,并能够根据无人机状态、遥控指令和外界环境因素综合制定无人机的飞行任务和机载设备的工作任务。它具有全局的规划能力、管理能力和指挥控制系统运行的能力。
3.3.2 飞行运动解算子系统模型
它是仿真系统的“运行”部分,相当于无人机系统中的飞行运动解算部分,它包含飞行器自身的物理部件中的动力学和运动学仿真模型或其功能部件仿真模型,它主要依据解码出的发动机马力指令计算出马力大小,然后按照飞行动力学与运动学原理实时解算出无人机的飞行状态信息(包含飞机的3个轴速度和3个姿态角)。
3.3.3 感知与执行子系统模型
它是仿真系统的行为“感知与执行”部分,相当于无人机系统的感知与执行器官,是一个综合的协作模型,应该具有精确的控制性和良好的协作性,因为对无人机系统的控制包含了飞行器本身的姿态控制、飞行的航迹控制和机载任务设备的控制,它们之间不是独立的,而是存在着复杂的耦合关系。
3.4 飞行仿真系统运行机制
飞行仿真系统包含若干功能模块,每个功能模块有许多子功能组成,如何有效地管理、组织整个仿真系统按照子功能的逻辑顺序实时、高效地运行是实现飞行仿真的关键。它们应该在一个统一的应用框架下,按照仿真数据的流程并依据模块内高聚合,模块间低耦合的原则运行。
相对于一般的飞行仿真系统,训练用无人机飞行仿真系统又包含自身的特点,它主要针对飞行操控任务和飞行操作流程任务,因此,需要考虑的问题包括飞行操作境的逼真度和操控任务的真实程度。另外还需要考虑仿真系统的快速开发和灵活建模,为实现具有开放性、可扩展性、可维护性的飞行仿真系统,采用面向对象的C++语言与统一的运行框架体制,各个系统模块在统一的结构框架下设置一个高度抽象的类CUAV,这个类提供给各个模块模型公共的数据结构和公共的操作定义,这个类不存在具体实例,各个模块模型根据自身的需求具体地实现这些操作。
整个仿真系统的子系统模块类被封装在整体类中,子系统类对象是整体类的成员对象,所以,在整体类对象构建的同时完成子系统类对象的实例化,子系统类对象实例化前应该调用CUAV的默认构造函数进行基类(CUAV)的初始化。当由CUAV派生的整体类和部件类都被实例化之后,就可以实现各个仿真模块模型的串联,进而可以使用循环方式和递归方式控制仿真系统按顺序执行。
CUAV提供了各个系统仿真模型的运行框架,其派生类按照统一的框架各自独立封装,派生类之间通过接口交互。CUAV采用链表记录各个仿真模型的地址,这种方法不仅可以有效地对各个仿真模型进行调度、管理,而且增加了整个仿真系统的灵活性,新开发的仿真模型可以方便地链接到链表中以相同的方式组织、调用。
4 结束语
本文研究了面向测控训练任务的无人机仿真训练系统,提出了适用于高逼真模拟训练的半实装无人机仿真训练系统的体系结构,即采用:“真实无人机地面测控设备”+“无人机飞行仿真系统”的框架结构。这种结构形式的仿真训练系统非常适合于无人机地面操作人员的日常训练需求,采用了“总—分”的建模路线和模块化、层级式的结构框架,根据训练型仿真系统设计了基于全任务的系统统一运行机制。所提出的仿真系统框架结构和运行机制不但能够提高系统建模的灵活性,还能够增强仿真系统运行的稳定性和实现的高效性。这种方法也能够给其他的训练型仿真系统的研究设计提供借鉴意义。
[1]童中翔.飞行仿真技术的发展与展望[J].飞行力学,2002,20(3):5-8.
[2]刘兴堂.论军用模拟训练器系统的发展趋势[J].空军工程大学学报,2001,(2)4:19-21.
[3]魏瑞轩,李学仁.无人机系统及作战使用[M].北京:国防工业出版社,2009.
[3]王行仁,贾荣珍.飞行实时仿真系统及技术[M].北京:北京航空航天大学出版社,1998.
[4]张 镭.飞行模拟器飞行仿真系统建模与软件实现[D].哈尔滨:哈尔滨工业大学,2009.
[5]Paul G F,Thomas J G.无人机系统导论[M].北京:电子工业出版社,2003.
[6]樊 军.训练型飞行模拟器系统设计及仿真研究.[D]西安:西北工业大学,2007.
UAV Simulation Training System Research and Design Implement Based on Half Real-equipment
YUN Chao1,2,LI Xiao-min2,ZHENG Zong-gui3
(1.63891 Ttoops of PLA,Luoyang 471003,China;2.Ordnance Engineering College,Shijiazhuang 050003,China;3.Academe of Second Artillerist,Beijing 100085,China)
Contrapose traditional remote sensing and control training task oriented for UAV ground operator have much disadvantage,it analyzes the character of training task mainly for UAV ground operator,and it brings to construct framework for UAV half-equipment simulation training system which is based on real ground remote sensing and control station.Then design the framework layer and operation mechanism is designed for typical UAV simulation training system.Contrast traditional simulation training system oriented for UAV ground operator,the structure of the system which brings by the project have much advantage for high fidelity,easily accomplish and multiplexing,development technology maturity,it has important applied value for improve training efficiency and reduce training cost.
UAV,simulation training,remote sensing and control training oriented,training efficiency
V279
A
1002-0640(2014)11-0124-04
2013-08-25
2013-10-30
武器装备科研基金资助项目(51325050101)
云 超(1984- ),男,陕西宝鸡人,在读博士。研究方向:无人机飞行仿真与模拟训练技术。