基于单片机的智能机器人设计与实现
2014-06-13李国豪
聂 茹,李国豪
(华南理工大学广州学院电子信息工程学院,广州510800)
1 引言
随着我国科学技术的进步,智能化和自动化技术越来越普及,智能小车作为移动式机器人的一个重要分支,随着机器人研究的深入受到越来越多人的关注。智能小车是一个多种高新技术的集成体,是计算机控制与电子技术的融合,集传感器探测,单片机自动控制、电机调速等于一体,为电子设备智能化提供了很好的实例。
本设计的智能小车机器人以STC89C52单片机[1]为控制核心,由红外避障模块[2]、声控模块、光电寻迹、电机驱动及语音播报模块组成,并使用Altium Designer Summer 09软件制作原理图和电路板。小车可以自动循迹在设计好的线路上行走,在遇到障碍物时可以自行停止并可以实现反向运行,可以利用声音控制小车的启停。本设计采用模块化设计结构,小巧紧凑,控制准确,性价比高,具有较高的人性化和智能化。
2 系统设计与原理
2.1 总体方案设计
总体方案设计如图1所示。
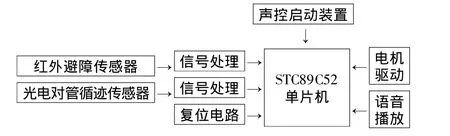
图1 方案设计图
2.2 工作原理
系统以STC89C52单片机作为控制芯片,通过L9110电机驱动电路作为小车行使驱动电机的核心,运用多路红外对管完成小车蔽障和循迹功能并且语音播报,以STC89C52单片机为控制小车的核心部分,实现小车多功能运行。
3 硬件电路设计
根据功能要求,本设计主要由电机驱动电路、光电循迹检测电路、红外避障电路、声控模块、语音播放几部分组成,下面将介绍这几个模块的设计。
3.1 电机驱动电路
电机驱动模块采用L9110。L9110是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,该芯片有两个TTL/CMOS兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能输出800 mA的持续电流,峰值电流能力可达1.5A[3]。L9110被广泛应用于玩具汽车电机驱动、步进电机驱动和开关功率管等电路上。将L9110的6、7引脚接到单片机,并且接上拉电阻,1、4引脚接电机的两端,通过对单片机的编程就可以实现两个电机的正反转。
3.2 光电循迹检测电路
接近反射式光电感应器件由一个红外线发射二极管和一个光电二极管组成,如图2所示,可以发射并检测到反射回的光线。由于不同颜色的物体对光的反射率不同,当感应器对准黑色物体时,黑色对光线反射率低,光电二极管接收到的反射光很少,不能导通,输出高电平;反之,当对准白色物体时,输出低电平。故而可以利用传感器区分出黑色跑道与白色跑道边缘,STC单片机可基于返回的信号控制伺服电机,从而控制小车的行进。
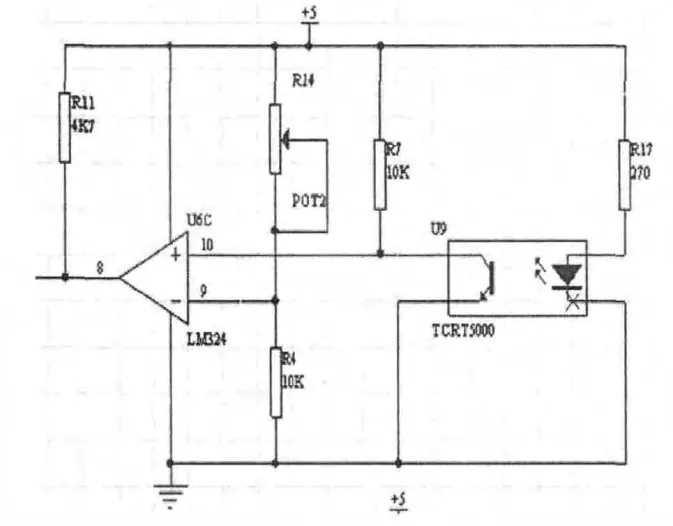
图2 光电循迹检测电路图
3.3 红外避障电路
红外线二极管发射红外光,如果机器人前面有障碍物,红外线从物体反射回来,相当于机器人眼睛的红外检测(接收)器,检测到反射回的红外光线,并发出信号来表明检测到从物体反射回红外线,从而控制伺服电机。图3为红外避障电路图。

图3 红外避障电路图
3.4 声控电路
系统采用麦克接收声音信号,将声信号转换为电信号,经放大、比较输出一个变化的数字开关量信号。声源接收电路利用MIC拾音器对声音的感应原理,电容C1进行充放电使三极管导通、截止,并作为LM393电压比较器的输入端,与比较电压比较后输出数字量。图4为声控电路图。

图4 声控电路图
3.5 语音播报电路
语音播报模块采用YF1600系列产品,YF1600系列产品的录音采样频率高,音质好,音量大,PWM直推喇叭,外围元件少。录音功能:按下按键,“B”一声开始录音。松开按键,“BB”两声停止录音;放音功能:按下按钮放音,也可以选择接到单片机的引脚,输出高电平,使得模块放音;LED指示灯:录音时长亮,播放声音时跟随声音以4Hz频率闪烁。
4 系统软件设计
系统软件流程图如图5所示。
5 系统调试
系统调试分为硬件调试和软件调试两方面。首先对照原理图全面检查硬件电路,各芯片、各模块是否正常工作。

图5 系统软件流程图
软件调试,将程序按模块进行调试。其中包含有前进、转弯、后退、转左、转右、启动、播报等程序。将它们分别烧写进单片机,接通电源,检查小车是否做出相应的动作,例如当烧写进避障程序时,将手放在红外对管前,然后看看小车的运动状态是否会做出相应的调整,当小车在黑线上循迹时小车的运动状态是否又会做出调整,经过不断调试从而达到预期效果。为了测试小车性能,对小车的循迹避障效果进行测试。打开小车的电源开关,把小车放在黑线上,感应到信号时,小车启动,在笔直的黑线和弯道上,基本都能跟踪黑线进行循迹。当前方20cm处出现障碍物时,小车自行停止播放声音,2.5秒后,车子反向循迹运行。
6 结束语
系统对智能小车的硬件和软件进行设计,实现了通过声音对小车的控制、小车的自动循迹和避障功能。在设计中软件采用模块化设计思想,以便于软件的修改、管理以及移植。实验结果表明:小车可以自动循迹在设计好的线路上行走,在遇到障碍物时可以自行停止并可以实现反向运行。设计的智能小车操作简单,稳定可靠,具有更好的智能性、稳定性和可扩展性[4]。
[1]吴健,侯文,郑宾.基于STC89C52单片机的温度控制系统[J].电脑知识与技术,2011(2):902-903.
[2]杨桂林.基于AT89S52的智能小车的设计[J].微计算机信息,2010,26(7):124 -125.
[3]薛红,尹廷辉,苏勇.循迹智能小车的系统设计[J].军事通信技术,2012(9):72-75.
[4]黄文辉,柳泽荣,黄鹏元.公交车—公交车站一体化语音播报系统[J].电子世界,2013(6):79-80.
